 Zaloguj
Zaloguj



- wejścia przystosowane do wykrywania kierunku obrotów zadanych mostkiem H,
- wyjścia typu TTL (0/5 V) do sterowania mostkiem H: A, B, ENABLE,
- maksymalna częstotliwość pracy ok. 50 kHz
- zasilanie stałym napięciem 8…35 V
- pobór prądu ok. 7 mA
Aby dobrze wyjaśnić zastosowanie układu warto opisać praktyczny przykład jego zastosowania.
Odbiornik radiowy zdalnego sterowania, który został pozyskany z zabawki, ma posłużyć do budowy znacznie większego pojazdu. W odbiorniku mostek H, sterujący oryginalnym silnikiem, ma niewielką wydajność prądową, a do tego został zintegrowany z głównym układem scalonym, więc wyodrębnienie poszczególnych sygnałów sterujących jest niemożliwe. Opisywany układ „zamieni” dwuprzewodowy sygnał, który zasilał oryginalny silniczek, na trójprzewodowy, który może wysterować mostek H o większym dopuszczalnym prądzie, np. L298N.
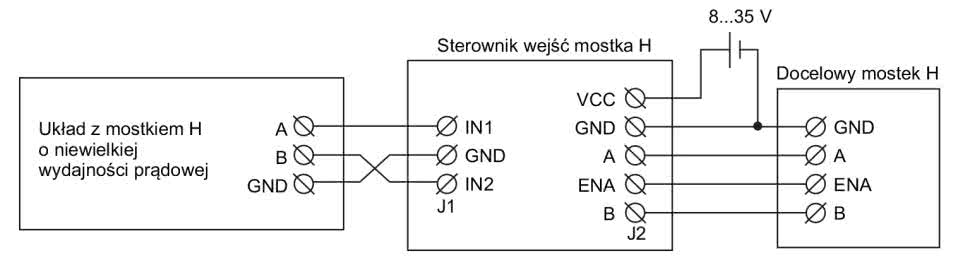
Schemat blokowy podłączenia sterownika prezentuje rysunek 1. Wychodzące z niego sygnały to A, B, ENABLE (kierunek + aktywacja wyjść). Tabela 1 przedstawia tablicę prawdy, która wiąże stany logiczne wejść i wyjść układu. Szczególną uwagę warto zwrócić na sytuację w najniższym wierszu, kiedy na obu wejściach pojawia się napięcie. Taki stan jest niedopuszczalny dla niektórych mostków i zostanie potraktowany tak samo, jak brak napięcia na obu wejściach.
| Wejście INA | Wejście INB | Wyjście A | Wyjście B | Wyjście ENA |
| L | L | L | L | L |
| L | H | L | H | H |
| H | L | H | L | H |
| H | H | L | L | L |
| H - stan wysoki (na wejściu: powyżej 3,2 V, na wyjściu: ok. 5 V) L - stan niski (na wejściu: poniżej 2 V, na wyjściu: ok. 0 V) |
||||
Budowa
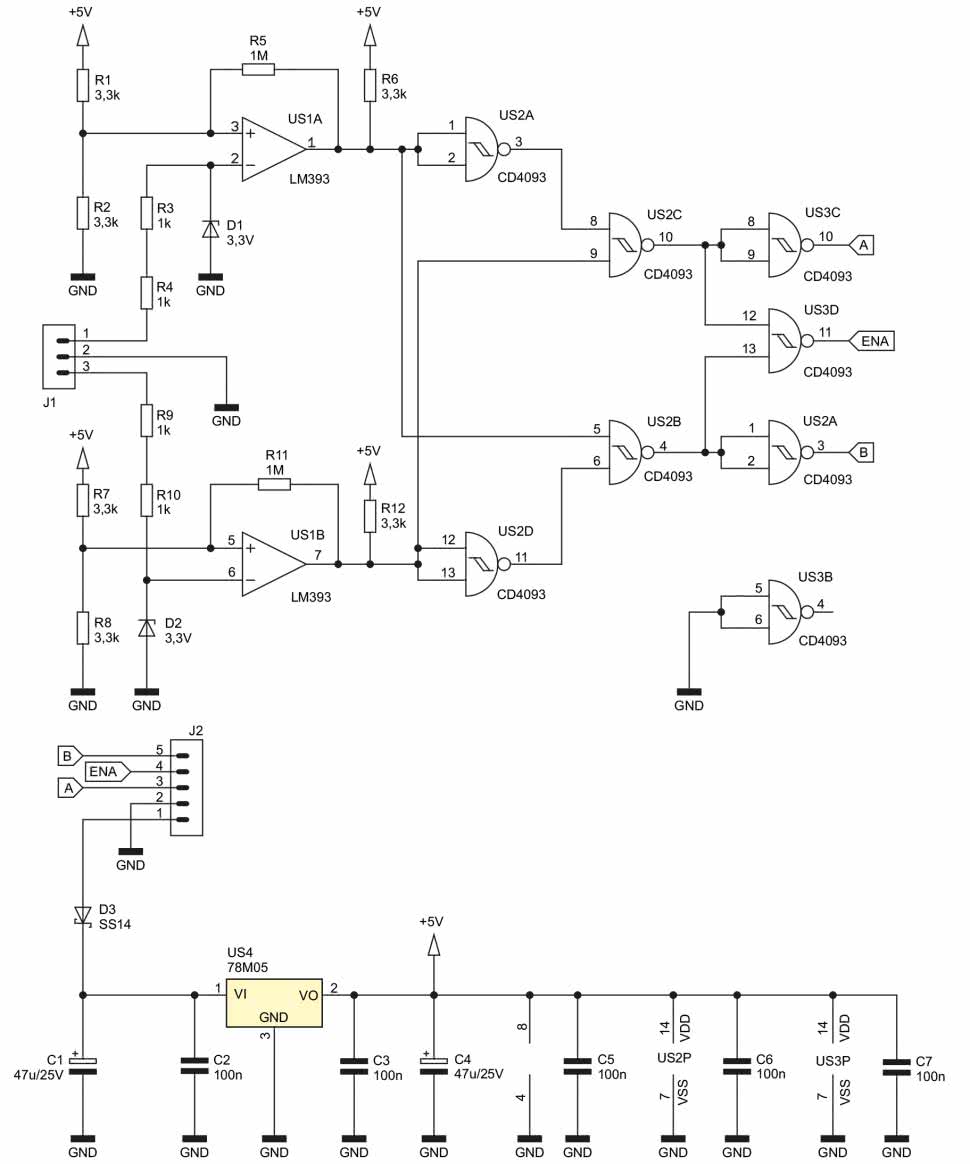
Schemat ideowy układu znajduje się na rysunku 2. Wyodrębnić można dwa komparatory oraz prosty blok cyfrowy, złożony z kilku bramek NAND.
Komparatory, zawarte w strukturze układu LM393, mają za zadanie określić, czy napięcie wchodzące do układu z mostka H można określić jako „stan niski”, czy też „wysoki”. Napięcie odniesienia to podzielone na pół stabilizowane napięcie zasilające część cyfrową, czyli ok. 2,5 V. Rezystory 1 MΩ w pętli dodatniego sprzężenia zwrotnego wytwarzają niewielką histerezę, co zapobiega powstawianiu niepożądanych oscylacji przy wolnozmiennych zboczach sygnału wejściowego. Diody Zenera ograniczają napięcie wejściowe do wartości ok. 3,3 V. Daje to margines równy ok. 1,7 V od napięcia zasilającego te komparatory. Taki margines jest wymagany przez producenta tego układu w jego nocie katalogowej - maksymalna wartość napięcia podawanego na wejścia nie może być wyższa niż napięcie zasilania pomniejszone o 1,5 V.
Wartości elementów zostały tak dobrane, że minimalne napięcie, które jest interpretowane jako „wysokie”, wynosi ok. 3,2 V. Sterujący układem mostek H może mieć relatywnie wysoki spadek napięcia w „niskim” stanie wyjścia - spowodowany obecnością np. układów mierzących prąd obciążenia - dlatego przyjęto pewien „zapas” napięcia. Z kolei, stan „niski” jest rozpoznawany przy napięciu ok. 2 V lub mniej.
Maksymalne napięcie, jakie może być podane na zaciski złącza J1, jest zdeterminowane głównie przez maksymalną moc, jaką można wytracić na rezystorach ograniczających prądy diod Zenera. Przyjmując 0,125 W na jeden rezystor w obudowie 0805, daje to maksymalne napięcie wejściowe ok. 25 V, co powinno wystarczyć w większości sytuacji. Gdyby jednak zaszła konieczność sprzęgnięcia układu ze źródłem sygnału o wyższym napięciu wyjściowym, należy zwiększyć odpowiednio ich rezystancję.
Wyjścia komparatorów są typu „otwarty kolektor”, dlatego rezystory R6 i R12 wymuszają na nich potencjał 5 V w momencie zatkania wbudowanych tranzystorów.
Bramki cyfrowe NAND mają za zadanie załączyć tylko jedno wyjście sterujące kierunkiem (A lub B) w sytuacji, gdy tylko jedno wejście jest w stanie wysokim. Dwa takie same poziomy napięć na wejściach nie powodują uaktywnienia wyjść. Dodatkowo, układ steruje wyjściem aktywującym mostek H (ENA) w sytuacji, gdy którekolwiek z wyjść - A lub B - jest w stanie wysokim.
Napięcie zasilające jest stabilizowane i wynosi 5 V. Dzięki zastosowaniu „nadmiarowego” stabilizatora, układ może być zasilany z napięcia o wartości ok. 35 V bez dodawania jakichkolwiek radiatorów. Dioda D3 chroni układ przed zniszczeniem w razie omyłkowej zamiany biegunów źródła zasilającego.
Montaż i uruchomienie
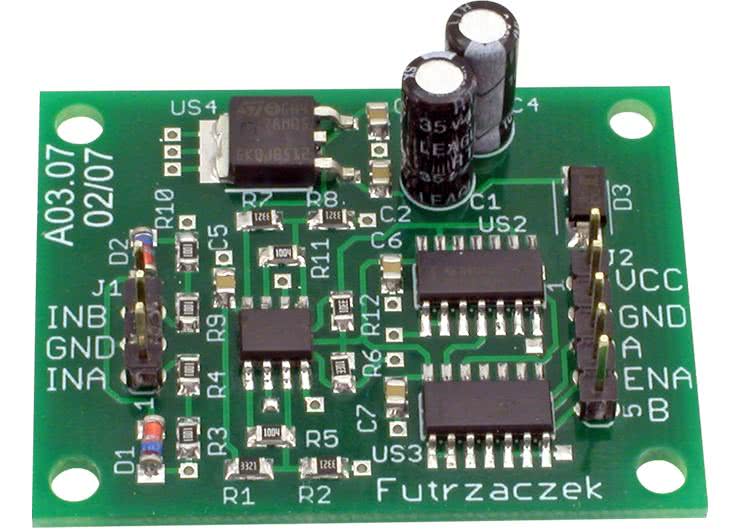
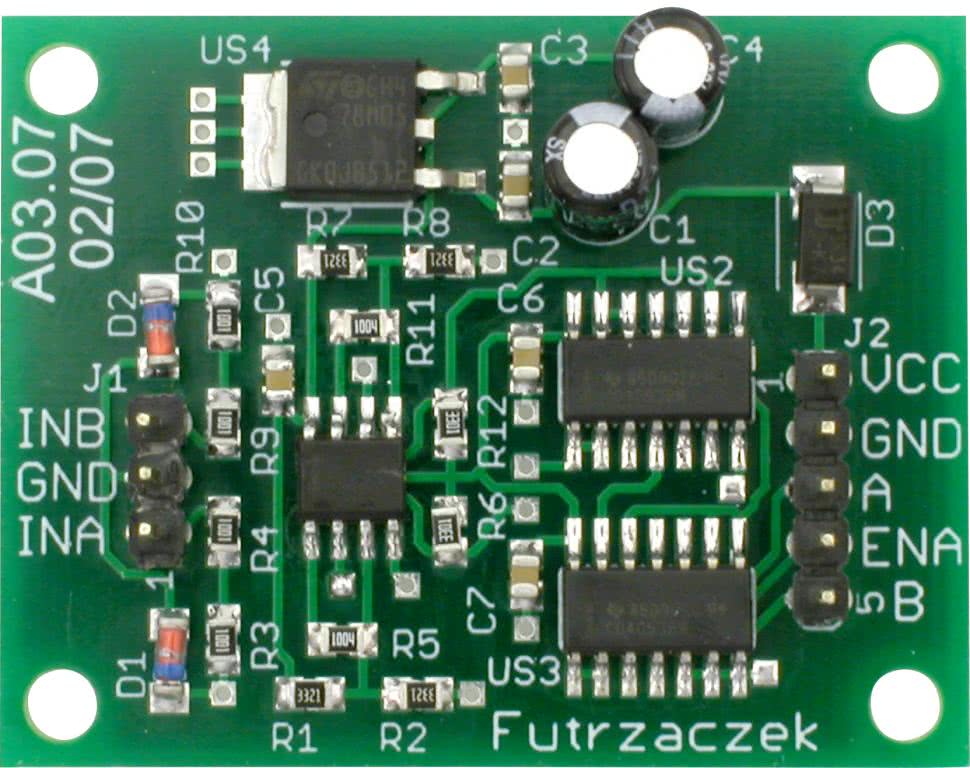
Układ został zmontowany na dwustronnej płytce drukowanej o wymiarach 35×45 mm, której schemat montażowy i wzór ścieżek przedstawia rysunek 3. Większość elementów montowana jest powierzchniowo i to od nich należy rozpocząć lutowanie. Złącza typu goldpin i kondensatory elektrolityczne warto zostawić na koniec. Gotowy układ pokazuje fotografia 4. Otwory montażowe znajdują się w odległości 3 mm od krawędzi płytki.

Prawidłowo zmontowany układ jest od razu gotowy do działania i nie wymaga jakichkolwiek czynności uruchomieniowych. Napięcie zasilania powinno wynosić od 8 V do 35 V, a pobór prądu (przy nieobciążonych wyjściach) to ok. 7 mA.
Dolna częstotliwość pracy jest równa zero - układ może trwać w ustalonej konfiguracji dowolnie długi czas. Natomiast górna częstotliwość, przy której wypełnienie impulsów jest przenoszone poprawnie, to ok. 50 kHz. Ta informacja jest istotna z punktu widzenia zastosowania PWM do regulacji mocy silnika.
Jeżeli zachodzi konieczność współpracy ze źródłem sygnału, które już po załączeniu wyjścia daje napięcie mniejsze od wspomnianej wcześniej wartości 3,2 V (ponieważ jest np. zasilane z dwóch baterii AA), można zmodyfikować progi przerzutu wejściowych komparatorów poprzez odpowiednie zmniejszenie wartości R2 i R8.
Michał Kurzela, EP
- R1, R2, R6…R8, R12: 3,3 kΩ SMD0805
- R3, R4, R9, R10: 1 kΩ
- SMD0805 (opis w tekście)
- R5, R11: 1 MΩ SMD0805
- C1, C4: 47 μF/25 V THT raster 2 mm
- C2, C3, C5…C7: 100 nF SMD0805
- D1, D2: Zener 3,3 V 0,5 W MiniMELF
- D3: SS14 lub podobna
- US1: LM393 SO8
- US2, US3: CD4093 SO14
- US4: 78M05 DPAK
- J1: goldpin 3 pin 2,54 mm THT
- J2: goldpin 5 pin 2,54 mm THT












