Ducker jest urządzeniem toru audio służącym do specyficznego, automatycznego miksowania sygnałów mowy i muzyki, stosowanym głównie w systemach nagłośnieniowych i rozgłoszeniowych. W systemach tych na stale obecną ścieżkę muzyczną (podkład) nakładana jest zapowiedź słowna (komunikat). Zadaniem duckera jest automatyczne ściszenie ścieżki muzycznej, gdy sygnał zapowiedzi przekroczy określony poziom i powrót do wcześniejszego poziomu ścieżki, gdy zapowiedź się skończy.
Zastosowanie omawianego urządzenia zwiększa zrozumiałość komunikatu, zwalniając operatora od konieczności ręcznego dostosowywania poziomów obu sygnałów podczas zapowiedzi. Analogiczna sytuacja występuje w domowym studio podczas udźwiękowiana materiału filmowego, podczas którego na ścieżkę muzyczną jest nakładany głos lektora. Trudno wyobrazić sobie sytuację, w której każdorazowo jest konieczne ręczne ustawianie poziomów ścieżki i lektora, aby zachować ich czytelność.
Opisany ducker wykonano na podstawie noty aplikacyjnej „DN102” firmy THAT Corporation. Zbudowano go w konfiguracji VCA, czyli wzmacniacza z napięciowo regulowanym wzmocnieniem. Sercem urządzenia jest specjalizowany układ THAT4301 zawierający wszystkie niezbędne bloki: wzmacniacz o regulowanym wzmocnieniu VCA, prostownik i detektor RMS oraz pomocnicze wzmacniacze operacyjne. Dzięki temu aplikacja wymaga tylko kilku elementów zewnętrznych.
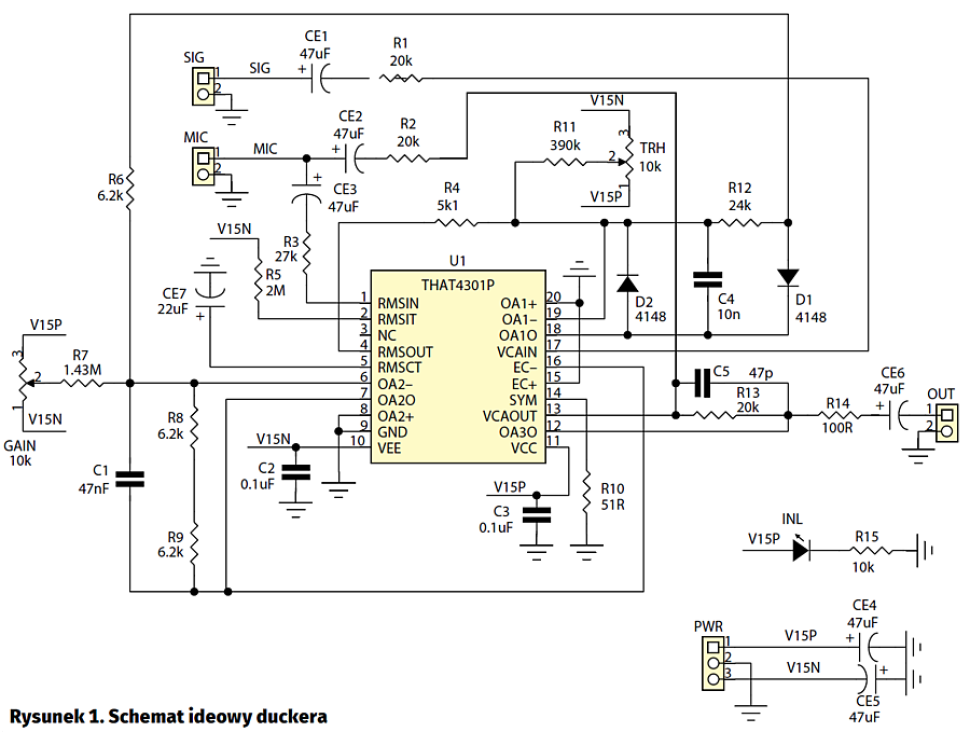
Schemat ideowy duckera pokazano na rysunku 1. Sygnał wejściowy (ścieżka muzyczna) z gniazda SIG jest doprowadzony do stopnia o regulowanym wzmocnieniu VCA układu U1. Sygnał zapowiedzi jest doprowadzony do gniazda MIC, a stąd na układ detektora RMS oraz do wyjścia układu VCA, gdzie jest sumowany z sygnałem SIG. Jeśli sygnał MIC ma niski poziom, detektor RMS połączony z wejściem sterującym VCA nie wpływa na wzmocnienie układu, a sygnał SIG jest przekazywany na wyjście OUT bez zmiany poziomu. Potencjometr GAIN umożliwia statyczną regulację wzmocnienia. Potencjometr TRH (Treshold) służy do ustawienia progu, powyżej którego poziom sygnału MIC redukuje wzmocnienie VCA, tłumiąc poziom ścieżki muzycznej SIG. Poziom tłumienia można dostosować, zmieniając wzmocnienie stopnia OA1 rezystorem R12. Próg zadziałania wynosi ok. –10 dB. Wartość kondensatora uśredniania układu detektora RMS, CE7 odpowiada za czas reakcji układu. W modelu CE7 ma stosunkowo dużą pojemność, która wydłuża czas reakcji układu (układ wolniej reaguje na pojawiający się sygnał zapowiedzi). Jeżeli potrzebny jest krótki czas, wartość CE7 należy zmniejszyć.
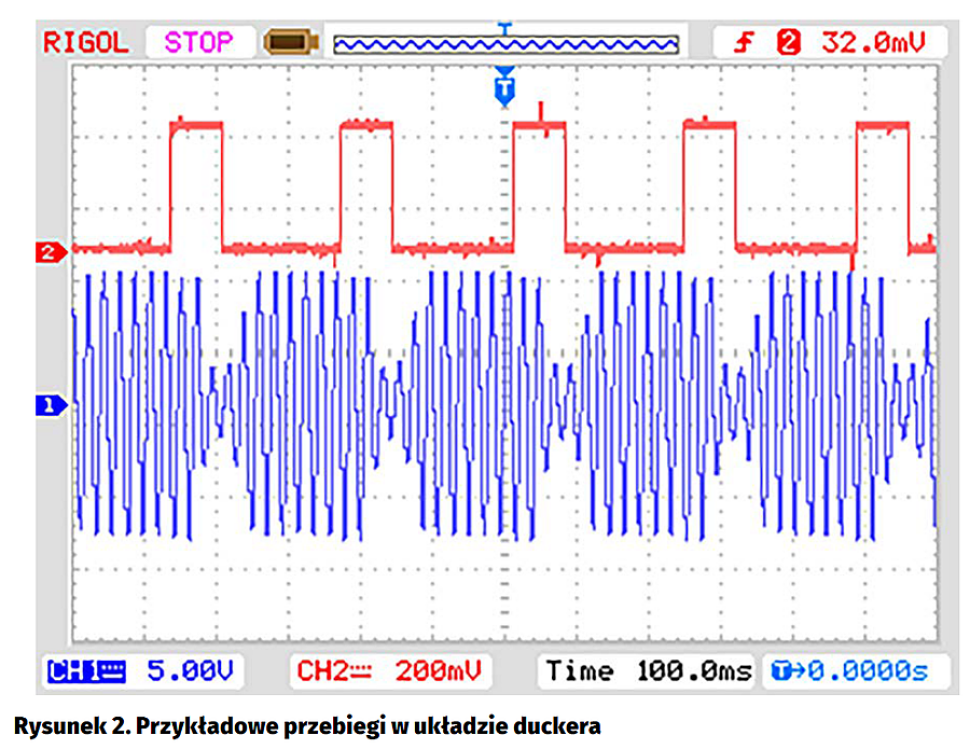
Przykładowy przebieg podczas działania układu przedstawia rysunek 2. Do wejścia SIG doprowadzono sygnał sinusoidalny o stałej amplitudzie, do wejścia MIC (2) sygnał prostokątny o niewielkim wypełnieniu, symulujący sygnał słowny. Na przebiegu wyjściowym (1) widać zmniejszenie poziomu sygnału SIG w momencie przekroczenia progu sygnału MIC, widoczna jest też zwłoka w działaniu układu wynikająca z wartości pojemności CE7.
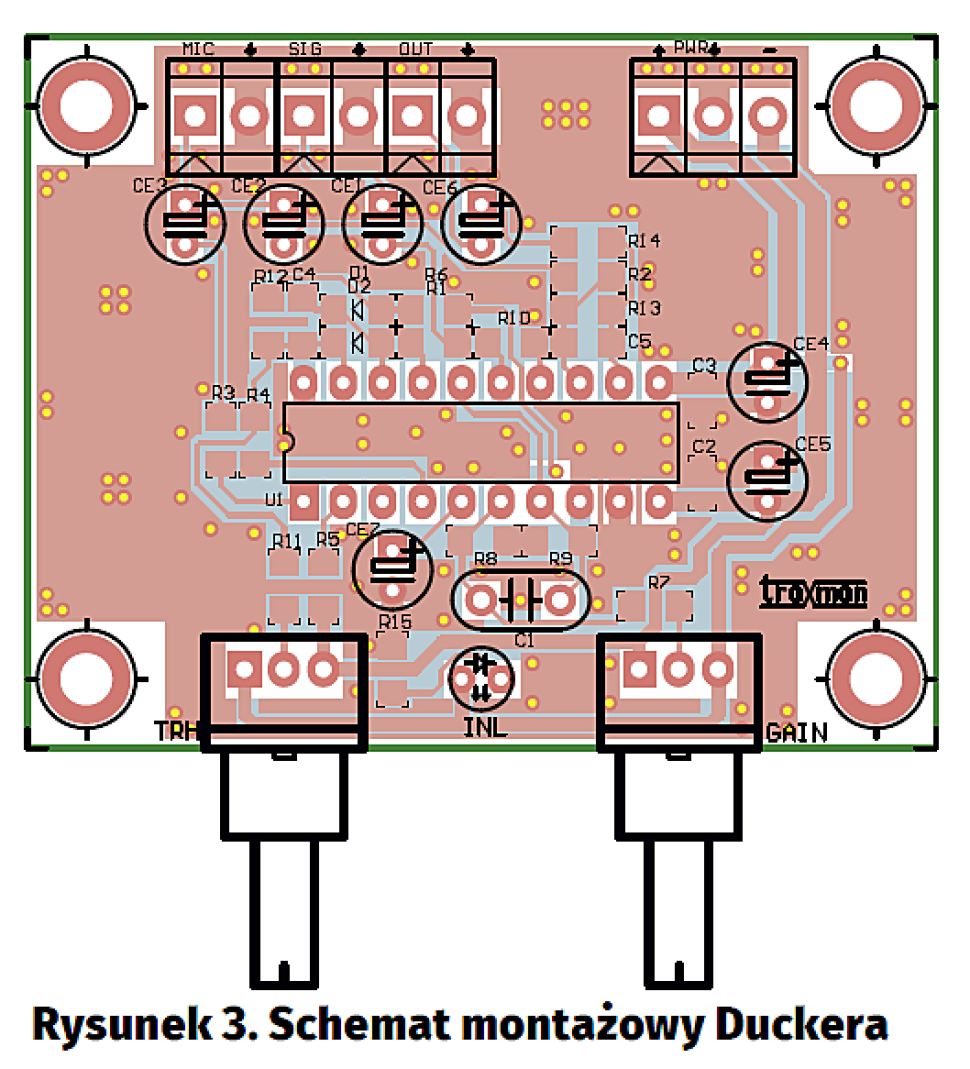
Ducker zmontowano na niewielkiej płytce drukowanej – jej schemat montażowy pokazano na rysunku 3. Do zasilania należy doprowadzić napięcie ±15 V/100 mA do złącza PWR. Poprawnie zmontowany ducker nie wymaga uruchamiania. W zależności od wymagań może konieczne być skorygowanie rezystancji R12 i pojemności CE7.
 Zaloguj
Zaloguj