 Zaloguj
Zaloguj




Jest to interfejs typu full-duplex, a więc umożliwia jednoczesne wysyłanie i odbieranie danych. SPI to interfejs synchroniczny. Jednym z przewodów przesyła się sygnał zegarowy synchronizujący wszystkie układy. Możliwe jest połączenie wielu układów. Najczęściej w sieci mamy jeden układ typu master, który wysyła polecenia do układów slave i odczytuje z nich dane. Tylko master może rozpocząć transmisję i to on może generować sygnał zegarowy. Sieci SPI multi-master są rzadko spotykane.
Jak działa SPI?
Magistrala SPI składa się z czterech linii. Są to:
- MOSI (master out, slave in) - linia łącząca wyjście danych z mastera i wejścia slave'ów,
- MISO (master in, slave out) - linia łącząca wyjście danych slave i wejście mastera,
- SCK (serial clock) - sygnał zegarowy, synchronizujący układy na magistrali,
- CS (chip select) - sygnał informujący slave o rozpoczęciu transmisji; sygnał ten jest zanegowany, co oznacza się poziomą kreską nad literami CS; uaktywnienie slave'a następuje po wystąpieniu stanu niskiego na linii, a stan wysoki układ slave deaktywuje.
Różni producenci stosują różne nazwy. Zdarzają się skrócone wersje SO i SI lub po prostu O oraz I.
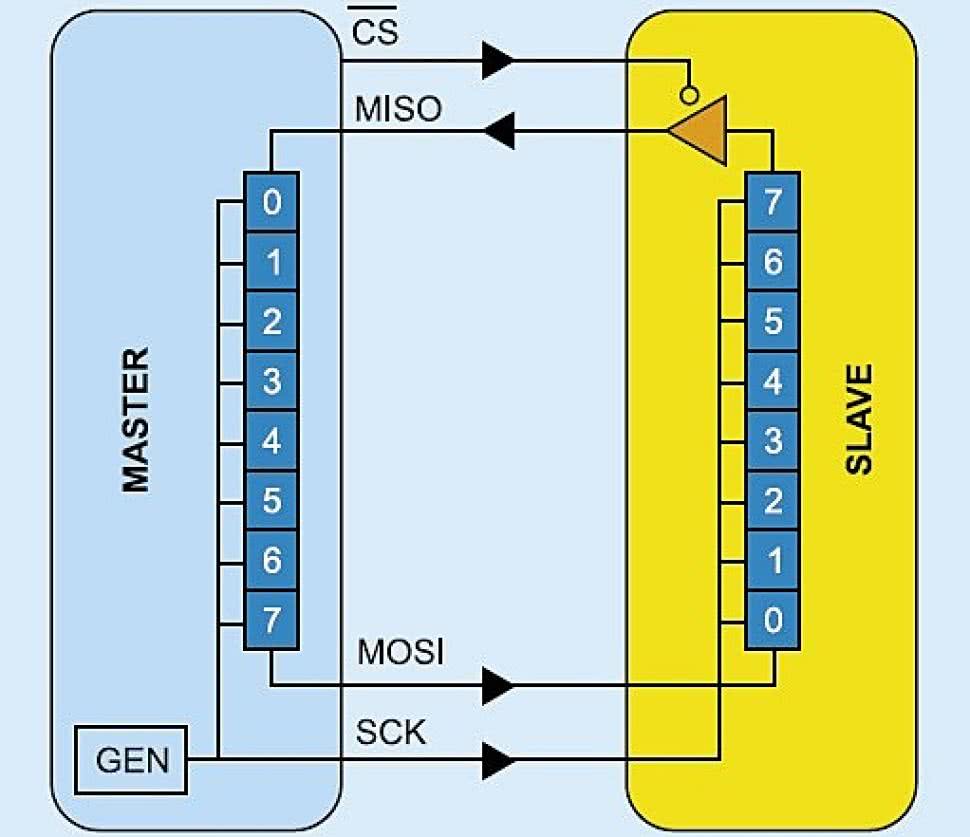
Rysunek 1. Budowa interfejsu SPI |
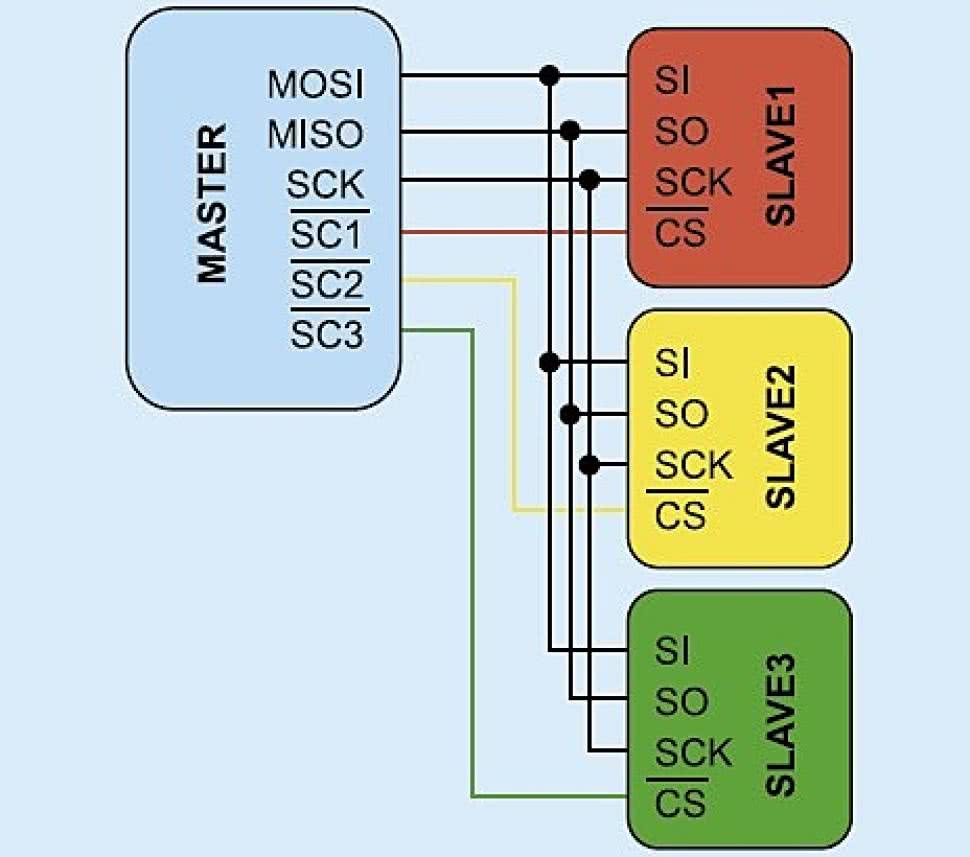
Rysunek 2. Układy SPI połączone w magistralę liniową |
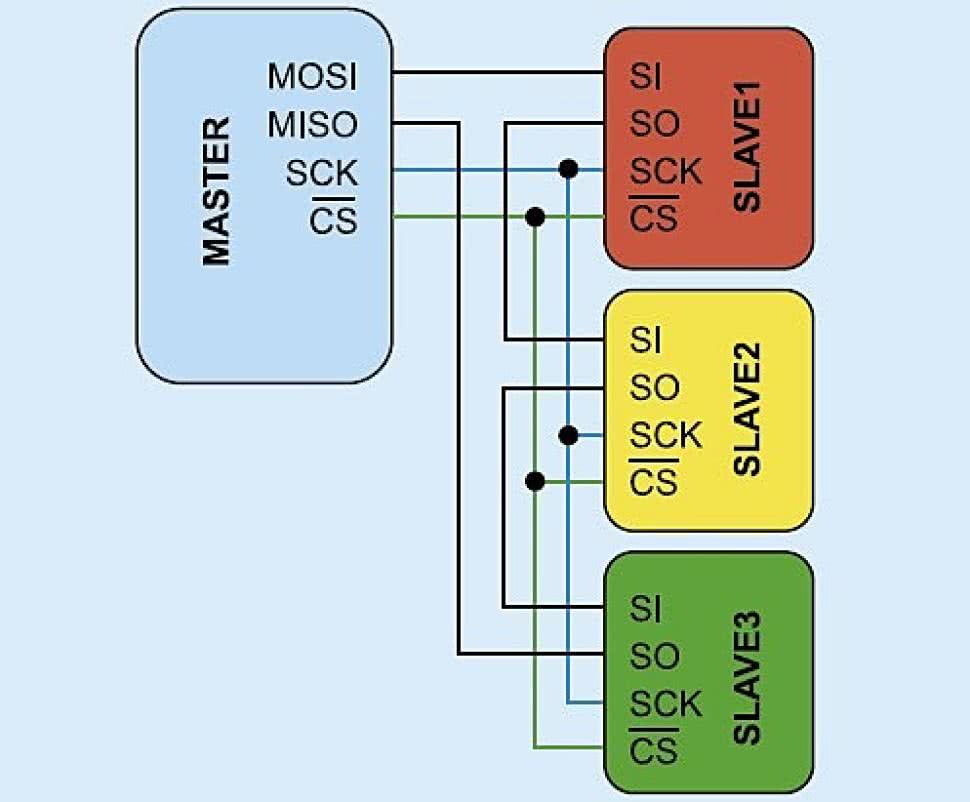
Rysunek 3. Układy SPI połączone w łańcuch (daisy chain) |
Budowę interfejsu SPI przedstawiono na rysunku 1. Jest on oparty na rejestrach przesuwnych. Są to układy składające się z szeregu przerzutników D, synchronizowanych jednym sygnałem zegarowym. W momencie wystąpienia odpowiedniego zbocza zegara, bit zapisany w przerzutniku 1 przesyłany jest do przerzutnika 2, z 2 do 3, z 3 do 4, itd. Do przerzutnika 1 wpisywany jest stan logiczny doprowadzony na wejście łańcucha, natomiast wyjście ostatniego przerzutnika jest wyjściem całego rejestru. Co by było, gdyby wyjście połączyć z wejściem? W takiej sytuacji, dane "kręciły by się w kółko". Konstrukcja taka zwana jest rejestrem pierścieniowym i ma zastosowanie w SPI.
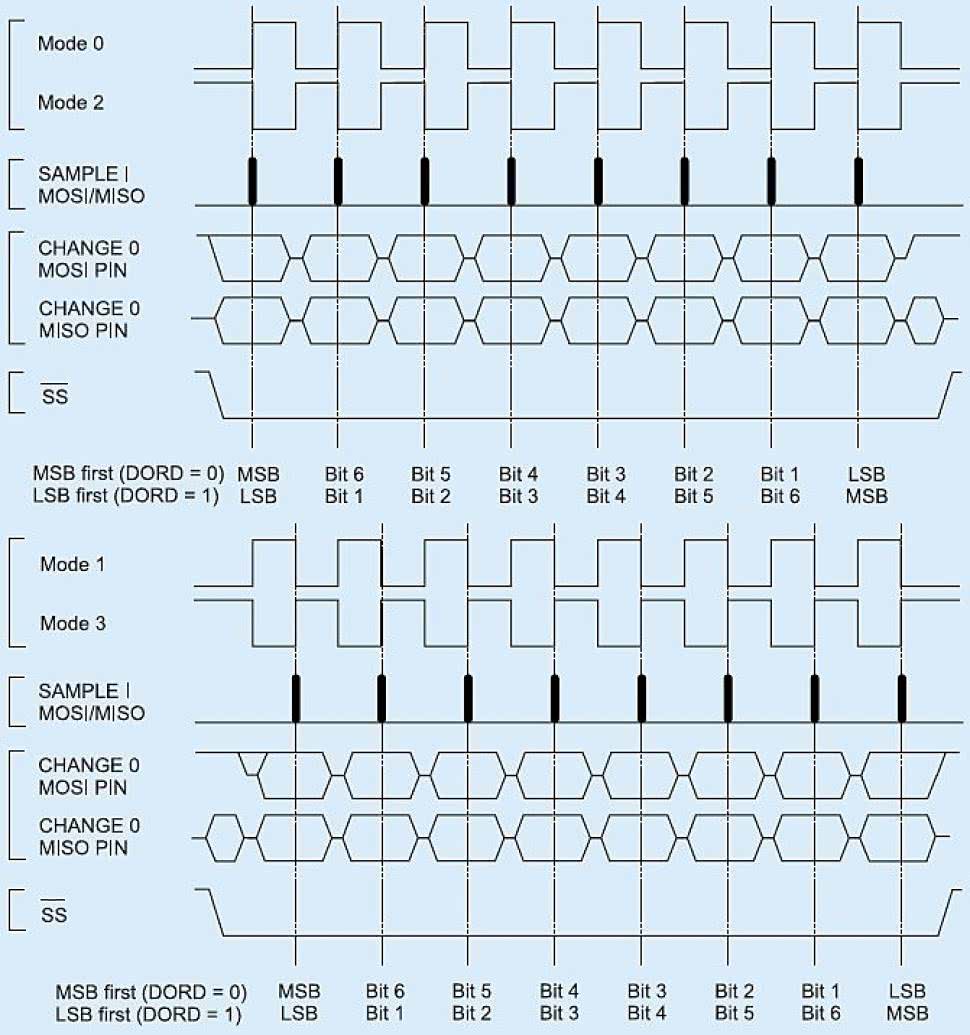
Rysunek 4. Tryby przesyłania danych
Zarówno master i slave mają rejestr przesuwny, składający się najczęściej z 8 przerzutników, przechowujących 1 bajt danych. Master posiada generator sygnału zegarowego, który steruje pracą wszystkich przerzutników. Linie MISO i MOSI tworzą pierścień, jednak dane pomiędzy masterem i slavem nie kręcą się w kółko w nieskończoność. Co osiem taktów zegara, a więc kiedy zostanie przesłany pełny bajt, zarówno master jak i slave mogą zmienić zawartość swoich rejestrów, przed kolejnym cyklem 8 taktów zegara.
Wynika z tego ważny wniosek - aby master odczytał dane ze slave'a, musi w tym samym czasie coś mu wysyłać. Na ogół są to same zera, jednak należy o tym pamiętać, że SPI jest interfejsem full-duplex.
Wyjaśnienia może wymagać jeszcze bufor trójstanowy na wyjściu ze slave'a. Jest on niezbędny ze względu na to, że do magistrali SPI można podłączyć wiele układów, ale nadawać może tylko jeden z nich. W sytuacji kiedy master dezaktywuje slave'a, bufor trójstanowy odłącza wyjście rejestru przesuwnego od magistrali i slave udaje, że go nie ma. Dzięki temu inny slave może przesyłać dane, bez obawy o konflikt pomiędzy nadajnikami.
Najczęściej spotykaną topologią sieci jest magistrala liniowa (patrz rysunek 2). Wszystkie układy są równolegle połączone do linii MISO, MOSI oraz SCK, a więc wszystkie układy "słyszą", co się dzieje na magistrali. Skąd slave'y wiedzą, który z nich ma być odbiornikiem transmisji? Do tego służą oddzielne linie CS, po jednej dla każdego układu slave. W stanie spoczynkowym, na wszystkich liniach CS występuje stan 1 - wtedy wszystkie układy są nieaktywne, a ich wyjścia MISO są ustawione w stan wysokiej impedancji. Master wybiera żądany układ slave ustawiając stan 0 na odpowiedniej linii CS. W sieci o takiej topologii mogą pracować różne układy SPI, niezależnie od ich producenta czy przeznaczenia.
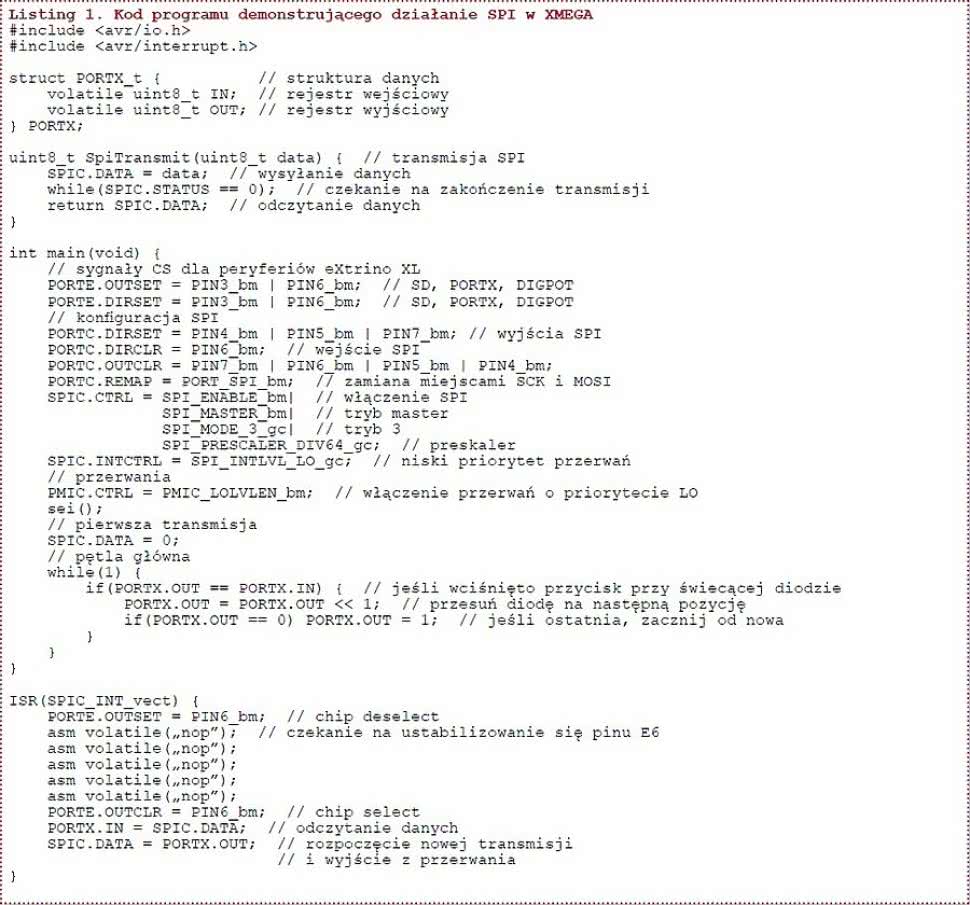
Listing 1. Kod programu demonstrującego działanie SPI w XMEGA
Czasami spotyka się układy SPI połączone w łańcuszek (niektórzy mówią głuchy telefon - czasami jest to bardzo trafne określenie takiego połączenia). Wyjście MOSI mastera jest połączone z wejściem slave'a 1, wyjście slave 1 łączy się z wejściem slave 2, itp., a wyjście ostatniego slave łączy się z wejściem MISO mastera. Taką sytuację przedstawia rysunek 3. Sygnały SCK oraz CS są połączone do wszystkich slave'ów równolegle.
Takie rozwiązania stosuje się, gdy mamy do czynienia z wieloma układami tego samego typu. Dobrym przykładem są tu sterowniki wyświetlaczy LED oparte na rejestrach przesuwnych. Można ich łączyć dziesiątki lub nawet setki. Innym przykładem, choć nieco odbiegającym od tematyki SPI, jest interfejs JTAG.
SPI nie precyzuje, czy dane mają być wysyłane od najstarszego czy najmłodszego bitu. Możemy sami to ustawić, w zależności od tego, co wymaga konkretny układ slave. Możemy również sprecyzować, czy dane mają być przesuwane w rejestrach po wystąpieniu zbocza rosnącego czy opadającego sygnału zegarowego SCK. Przykładowe konfiguracje i przebiegi sygnałów przedstawiono na rysunku 4.
SPI w XMEGA
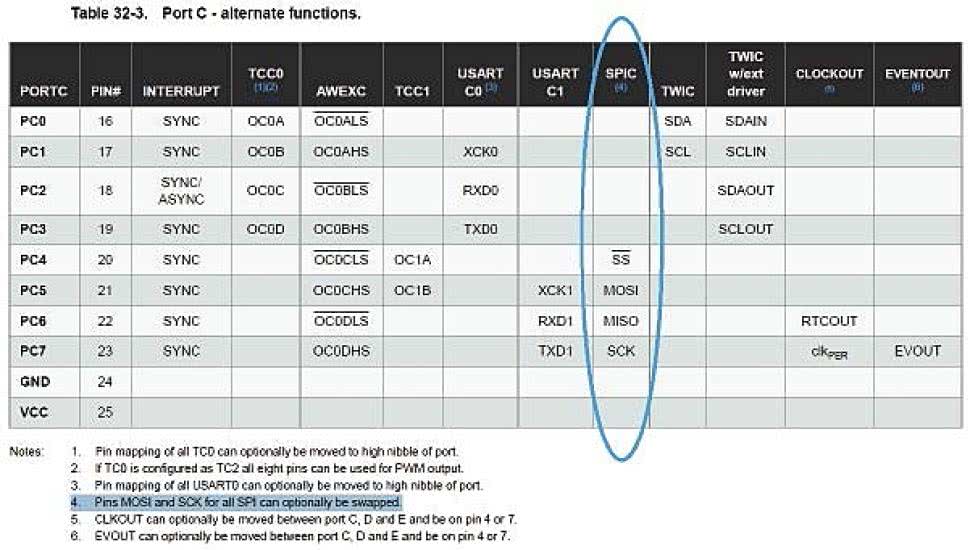
Rysunek 5. Piny IO w XMEGA
Mikrokontroler ATxmega128A3U posiada trzy interfejsy SPI, dostępne w portach C, D, E, a nazwy tych interfejsów to odpowiednio: SPIC, SPID, SPIE. Są one funkcjonalnie identyczne, a my w naszych przykładach wykorzystamy moduł SPIC. Wszystkie przykłady zostały przedstawione w jednym zbiorczym listingu 1.
Pierwsza rzecz, od której najlepiej zacząć, to konfiguracja pinów IO. W starych AVR-ach, włączenie interfejsu powodowało automatyczne skonfigurowanie pinów wejść i wyjść. W XMEGA musimy to zrobić samodzielnie. Konfiguracja pinów IO została opisana w EP 2013/11. Spójrzmy zatem do ATxmega128A3U datasheet i w tabeli przedstawionej na rysunku 5, sprawdźmy, które piny jaką funkcję realizują. Zamieszczam tą tabelkę, by podkreślić dwie bardzo istotne sprawy:
- Pin SS (slave select) można wykorzystać jako CS do sterowania slavem, kiedy ustawimy go jako wyjście. Jednak jeśli będzie on ustawiony jako wejście, (tak jest domyślnie po włączeniu procesora!), to pojawienie się stanu niskiego na pinie SS spowoduje przełączenie modułu SPI z trybu master do trybu slave. Jeśli Twój procesor zawsze ma pracować w trybie master, ustaw pin SS jako wyjście, nawet jeśli jako CS wykorzystujesz inne piny.
- Przypis 4 pod tabelą mówi, że piny MOSI i SCK można zamienić miejscami. Po co? Zwróć uwagę na interfejs USART C1. Piny MOSI i SCK są funkcjonalnie identyczne jak TXD i XCK. Jeśli projektując płytkę, zamienimy te dwa piny, później pisząc program będziemy mogli wybrać, czy chcemy korzystać z SPI oraz USART. SPI jest prostsze, a USART jest trochę bardziej skomplikowany lecz daje większe możliwości. Zamiany dokonuje się, wpisując wartość PORT_SPI_bm do rejestru PORTx.REMAP. Pamiętaj, że w płytce eXtrino XL, którą wykorzystamy w tym kursie, piny MOSI i SCK są zamienione.
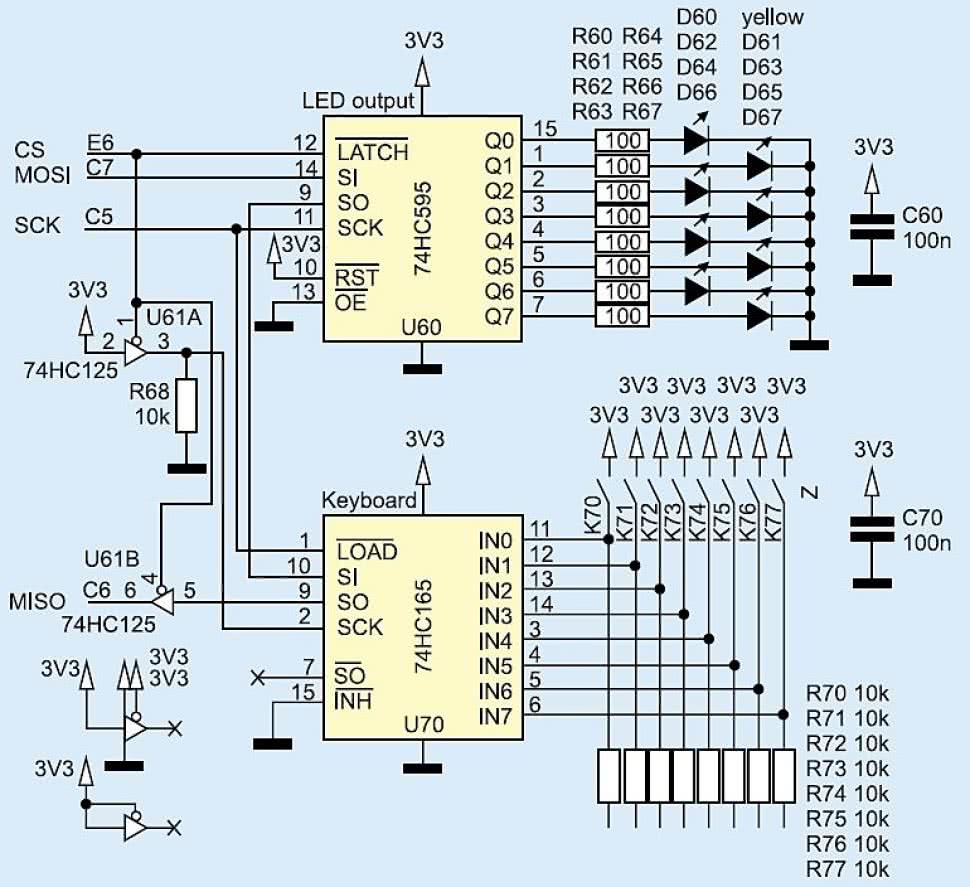
Rysunek 6. Schemat dodatkowego portu sterowanego przez SPI
Po skonfigurowaniu pinów IO, przechodzimy do konfiguracji właściwego interfejsu. Wystarczy wpisać odpowiednie wartości do zaledwie jednego rejestru o nazwie CTRL. Ustawiamy w nim kilka prostych parametrów:
- SPI_ENABLE_bm - ustawienie tego bitu powoduje uaktywnienie interfejsu,
- SPI_MASTER_bm - włączenie trybu master,
- SPI_MODE_x_gc - grupa konfiguracyjna, decydująca m.in. o próbkowaniu i polaryzacji sygnału zegarowego (patrz rysunek 4)
- SPI_DORF - przesyłanie danych od najmłodszego bitu,
- SPI_PRESCALER oraz SPI_CLK2X - ustawianie częstotliwości zegara
Jeśli chcemy wykorzystywać przerwania, musimy jeszcze ustawić priorytet przerwań w rejestrze INTCTRL oraz uruchomić kontroler przerwać PMIC (opisane w EP 2013/12). SPI może generować tylko jeden rodzaj przerwań o nazwie SPIx_INT_vect.
Do wysyłania i odbierania danych służy rejestr DATA. Pamiętaj, że SPI jest interfejsem full-duplex i nawet jeśli chcesz tylko odebrać jakieś dane, musisz coś wysłać, za przykład 0. Transmisja rozpoczyna się po wpisaniu bajtu danych do rejestru DATA. Następnie należy poczekać, aż dane zostaną przesłane, sprawdzając w pętli rejestr STATUS. Pojawienie się jedynki na pozycji SPI_IF_bm oznacza, zakończenie transmisji (co wywoła przerwanie, jeśli jest odblokowane). Dane wysłane ze slave'a do mastera możesz odczytać również z rejestru DATA.
Przed rozpoczęciem transmisji musisz ustawić pin CS wybranego slave'a w stan niski, a następnie poczekać na ustabilizowanie się napięcie na tym pinie. Do tego celu można użyć instrukcji czekania _delay_us(1) albo kilkukrotnie wkleić asm volatile("nop");. Po zakończeniu transmisji, pin CS musisz ustawić w stan wysoki.
Przykłady inicjalizacji, funkcji przesyłającej dane oraz procedury przerwania znajdziesz na listingu 1.
Dodatkowy PORTX
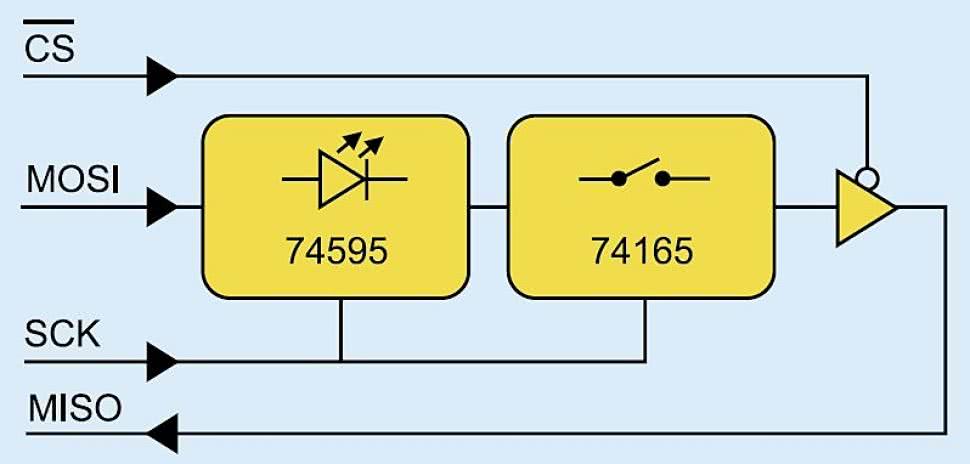
Rysunek 7. Schemat uproszczony
W tym odcinku kursu zobaczymy, jak przy pomocy interfejsu SPI oraz rejestrów przesuwnych typu 74595 oraz 74165 stworzyć dodatkowy port IO oraz jak napisać program, aby obsługa tego dodatkowego portu była podobna do zwykłych portów mikrokontrolera. W ten sposób można samodzielnie zbudować odpowiednik ekspandera portu typu PCF8575 za niższą cenę.
Schemat układu przedstawiono rysunku 6, a jego uproszczony łatwiejszy do zrozumienia, uproszczony schemat, przedstawia rysunek 7. Rejestr 74595 ma wejście szeregowe oraz 8 wyjść równoległych, które możemy wykorzystać do dowolnego celu, np. do sterowania diodami. Układ 74165 ma 8 wejść równoległych i wyjście szeregowe. Możemy do nich podłączyć klawiaturę, czujniki lub inne układy cyfrowe.
Zastanówmy się, co się dzieje w tym układzie podczas transmisji jednego bajtu. Sygnał CS zmienia swój stan z 1 na 0, po czym moduł SPI w XMEGA nadaje osiem bitów. Wraz z każdym taktem sygnały zegarowego SCK, rejestry "przesuwają" swoje bity. W ten sposób, bajt danych z XMEGA trafia do 74595. Paczka 8 bitów dotychczas przechowywanych z 74595 jest przesyłane do 74165 i de facto są to dane, które nas nie interesują. Natomiast 8 bitów z 74165, odpowiadające sygnałom wejściowym tego rejestru, przesyła się do modułu SPI w XMEGA. Na zakończenie, zmiana CS z 0 na 1 powoduje odświeżenie wartości tych rejestrów. W ten elegancki sposób, transmitując 8 bitów, ustaliliśmy stan wyjść oraz odczytaliśmy stan wejść.
Doskonałym pomysłem jest tutaj zastosowanie przerwań. Po każdej transmisji, układ SPI może generować przerwanie i wysyłać kolejny bajt danych, aby wejścia i wyjścia samoczynnie się odświeżały. Jedyne, co musimy zrobić, to skonfigurować SPI i wywołać pierwszą transmisję, wpisując cokolwiek do rejestru SPIC.DATA.

Fotografia 8. Przykład działania układu demonstrującego PORTX SPI
Możemy posunąć się o krok dalej i stworzyć "pseudoport", by kod programu jak najbardziej przypominał obsługę zwykłego portu. W tym celu zdefiniujemy sobie strukturę PORTX, w której znajdować się będą rejestry IN i OUT, analogicznie do zwykłych portów XMEGA. Ważne, aby nie zapomnieć i kwalifikatorze volatile, gdyż te zmienne będą aktualizowane w przerwaniach, a bez tego kompilator mógłby nieprawidłowo je zoptymalizować.
Na płytce eXtrino XL znajduje się 8 przycisków, a przy każdym z nich jest dioda LED. Napiszmy program, w którym świeci się jedna z tych diod tak długo, aż użytkownik naciśnie przycisk przy tej diodzie. Wtedy zapali się sąsiednia dioda i program będzie czekał na naciśnięcie sąsiedniego przycisku, itd.
Kod programu przedstawia listing 1. Zwróć uwagę, że w pętli głównej nigdzie nie ma żadnych funkcjo obsługujących SPI. PORTX działa zupełnie jak normalny port!
Wyjaśnić należy procedurę przerwania, gdyż zaczyna się ona od deaktywowania układów SPI (CS=1), następnie czekamy kilka cykli i znów aktywujemy SPI (CS=0). Jest to podyktowane faktem, że ostatnim poleceniem przerwania powinno być wpisanie danych do rejestru SPIC.DATA. Wtedy moduł SPI transmituje dane, a w tym czasie procesor może wykonywać inne zadania.
Kiedy moduł SPI zakończy transmisję, wówczas jest zgłaszane przerwanie. Wtedy, jako pierwsze następuje ustawienie CS w stan wysoki, co oznacza zakończenie transmisji rozpoczętej w poprzednim wywołaniu przerwania. Może to początkowo wydawać się trochę zagmatwane, jednak proszę przeanalizować kod wraz z komentarzami, a wszystko stanie się bardzo proste.
Działanie układu przedstawiono na fotografii 8. Po wciśnięciu przycisku, dioda LED "przeskakuje" na sąsiednią pozycję po lewej stronie.
Dominik Leon Bieczyński
www.leon-instruments.pl












