 Zaloguj
Zaloguj





Rysunek 1. Diagram klas projektu
Karty SD komunikują się z kontrolerem nadrzędnym za pomocą dedykowanej magistrali SDBus. Dodatkowo wyposażone są interfejs kompatybilny z SPI, dzięki czemu, mogą być stosunkowo łatwo obsłużone nawet przez najprostsze mikrokontrolery 8-bitowe. Największym mankamentem pracy w trybie SPI, jest mniejsza prędkość transmisji danych.
Nie bez znaczenia jest również fakt, że dla kart microSD (wypierających obecnie standardowe karty SD) kompatybilność z magistralą SPI jest opcjonalna i może nie być zaimplementowana przez producenta. Nabywając kartę uSD nie mamy zatem pewności, czy będzie ona współpracowała z naszym urządzeniem wykorzystującym komunikację z kartą po SPI, co niejednokrotnie może być powodem frustracji.
O ile magistrala SPI jest dostępna praktycznie w każdym układzie, magistrala SDBus jest domeną bardziej zaawansowanych układów. W wypadku mikrokontrolerów z rodziny STM32 większość małych układów np. STM32F100 czy nawet STM32F107 nie ma wbudowanego kontrolera.
Dopiero bardziej zaawansowane układy, takie jak STM32F2/F4 mają sprzętowy układ SDBus, co zapewne jest spowodowane kwestiami licencyjnymi. Jeśli chcemy napisać uniwersalną bibliotekę zapewniającą możliwie największą wydajność oraz współpracującą z każdym mikrokontrolerem, należy zapewnić obsługę kart zarówno w trybie SDBus jak i SPI, co jest zadaniem dość skomplikowanym.
Dzięki zastosowaniu biblioteki libSD systemu ISIXRTOS obsługa i używanie kart SD niezależnie od użytego mikrokontrolera oraz trybu pracy SPI lub SDIO z poziomu API jest trywialna. Do najważniejszych cech biblioteki libSD obsługującej karty SD w systemie ISIX zaliczamy:
- Obsługa kart SD z wykorzystaniem natywnej magistrali SD w trybie 1bit oraz 4 bit.
- Obsługa kart SD w trybie kompatybilności z magistralą SPI.
- Obsługa kart SD oraz SDHC o pojemności > 2 GB.
- Łatwość rozbudowy biblioteki o obsługę dodatkowych kontrolerów, dzięki obiektowej budowie.
- Możliwość rozbudowy o inne urządzenia dołączane do magistrali SD np. moduły SDIO
Opis obsługi kart SD w systemie ISIXRTOS
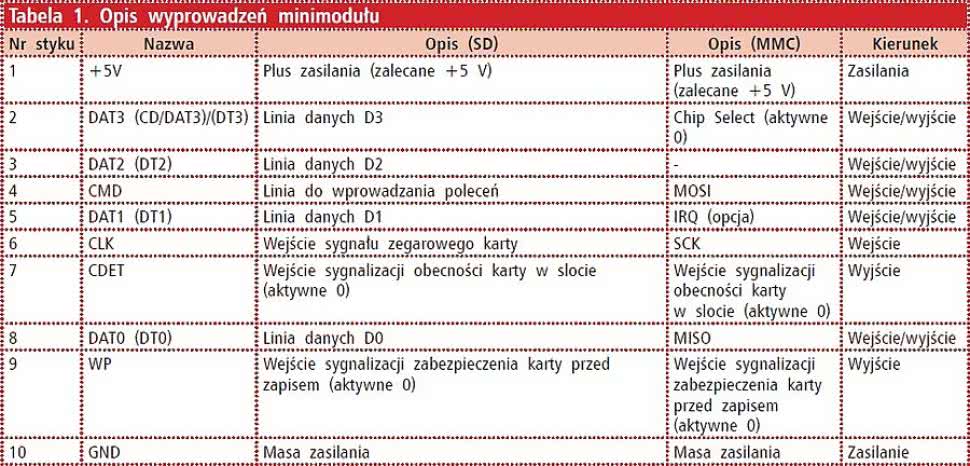
Tabela 1. Opis wyprowadzeń minimodułu
Biblioteka libSD implementuje interfejs blokowy dla kart SD, czyli dostęp do przestrzeni adresowej karty na poziomie sektorów, nie ingerując w sposób organizacji danych na karcie. Za organizację danych odpowiedzialna jest warstwa systemu plików. W przypadku kart SD i SDHC standardowym systemem plików, w którym sformatowane są nowo nabyte katy jest FAT. W systemie ISIX do obsługi systemu plików postanowiono wykorzystać gotowe rozwiązanie w postaci biblioteki FATFS.
Biblioteka FATFS kieruje żądania odczytu/zapisu sektorów do biblioteki libSD, które następnie przez bibliotekę przetwarzane są na odpowiednie polecenia i kierowane za pośrednictwem kontrolera do karty. Nic nie stoi na przeszkodzie aby wykorzystać inne biblioteki implementujące inne systemy plików na przykład ext2 znany z systemu linux. Biblioteka libSD została napisana w języku C++ (ISO/IEC 14882:1998). Diagram klas projektu przedstawiono na rysunku 1.
Na rysunku przedstawiono kompletną hierarchię klas biblioteki, zarówno dla trybu SPI, jak i dla trybu natywnego z magistralą SD. Pomimo, że całość wydaje się stosunkowo skomplikowana, używanie biblioteki jest stosunkowo proste co pokażemy w dalszej części artykułu. Z punktu widzenia użytkownika końcowego API blokowego dostępu do karty stanowią klasy mmc_slot oraz klasa mmc_card. Klasa mmc_slot reprezentuje fizyczne gniazdo karty SD natomiast klasa mmc_card jest obiektem reprezentującym kartę pamięci SD.
Obiekt klasy mmc_card zarządzany jest przez klasę gniazda mmc_ slot. Zarządzanie obiektem polega na tym, że w momencie włożenia karty tworzony jest obiekt mmc_card odpowiedzialny za obsługę karty natomiast w momencie wyciągania karty obiekt mmc_card jest niszczony. W przyszłości planowane jest dodatnie innych typów karty niż karty pamięci SD np. karty SDIO, wówczas w zależności od rodzaju karty tworzony będzie odpowiedni obiekt reprezentujący odpowiedni rodzaj karty.
Klasa mmc_slot odpowiedzialna jest również za generowanie zdarzeń w momencie wkładania lub wyciągania karty informujących program użytkownika o dostępności karty w slocie. Aby można było odwołać się do karty i zapisać lub odczytać sektory należy zaczekać na włożenie karty, a następnie pobrać od obiektu mmc_slot obiekt klasy mmc_card. Po pobraniu instancji tego obiektu możemy odwoływać się do odpowiedniego API uzyskując dostęp do zawartości pamięci karty. Wykrywanie i wkładanie karty realizowane jest poprzez klasę mmc_slot, która do sprawdzania stanu karty wykorzystuje klasę abstrakcyjną immc_det_pin. Klasa ta stanowi interfejs abstrakcji sterownika urządzeń zawierający metodę
virtual bool get() const = 0;
Zadaniem tej metody jest zwrócenie wartości true, w przypadku gdy karta dołączona jest do gniazda, lub false jeśli karty brak w slocie. Implementacja powyższego interfejsu realizowana jest w klasie stm32:drv::gpio_pin, która stanowi warstwę sterownika specyficzną dla danej platformy i w praktyce sprowadza się do sprawdzenia stanu odpowiedniej linii GPIO. Komunikacja z kartą realizowana jest za pomocą kontrolera SD, którego reprezentacją jest abstrakcyjna klasa bazowa drv::mmc::mmc_ host.
Klasa slotu podczas tworzenia obiektu przyjmuje referencje do klasy kontrolera. W zależności od mikrokontrolera, którym dysponujemy (tylko SPI lub dedykowany SD) należy utworzyć klasę wywodzącą się z podanej klasy bazowej implementującej wybrany tryb pracy.
Jeśli do dyspozycji mamy układ wyposażony w natywny kontroler magistrali SD należy utworzyć instancję obiektu klasy drv::stm32::mmc_host_sd , a następnie przekazać referencje do niego klasie mmc_slot.
Klasa mmc_host_sd należy do warstwy sterownika urządzenia i dziedziczy z klasy bazowej drv::mmc::mmc_ host. Jest to implementacja specyficzna dla sprzętowego kontrolera SD rodziny stm32. Tworząc inną klasę możemy stworzyć sterownik dla innego typu kontrolera w zależności od zastosowanego sprzętu. Przykładowy kod tworzący potrzebne obiekty do pracy w natywnym trybie SDIO może wyglądać następująco:
stm32::drv::mmc_host_sdio m_mmc_host(config::PCLK2_HZ, 6000);
stm32_gpio m_pin;
drv::mmc::mmc_slot m_slot m_slot( m_mmc_host, m_pin );
Najpierw jest tworzony obiekt klasy mmc_host_sdio, gdzie w konstruktorze jako argument przekazana jest częstotliwość pracy magistrali PCLK, oraz częstotliwość z jaką chcemy aby pracował interfejs SDIO wyrażoną w kHz W tym przypadku jest to 6 MHz. (Standardowe karty mogą pracować z częstotliwością do 25 MHz.) Następnie tworzony jest obiekt stm32_gpio, którego zadaniem jest sprawdzanie stanu dostępności karty. Po utworzeniu instancji kontrolera oraz pinu ostatnią czynnością jest utworzenie obiektu slotu.

Tabela 2. Połączenie KAMODMMC z STM32Butterfly
Jeśli do dyspozycji nie mamy sprzętowego kontrolera SD a jedynie SPI, wówczas należy skorzystać z pracy karty w trybie kompatybilności. W tym celu należy stworzyć obiekt klasy mmc_host_spi, a następnie przekazać referencję do tego obiektu klasie mmc_slot. Z uwagi na to, że implementacja protokołu SD za pomocą trybu kompatybilności z SPI jest niezależna od sprzętu oraz aby uzyskać maksymalną elastyczność i możliwość ponownego użycia kodu mmc_host_spi zamiast bezpośredniego dostępu do kontrolera SPI, wykorzystuje dodatkową warstwę abstrakcji magistrali SPI. Klasa kontrolera hosta SPI przyjmuje referencję do abstrakcyjnej klasy bazowej spi_device stanowiącej generyczny interfejs obsługi magistrali SPI. Klasa pochodna implementująca ten interfejs stanowi bezpośrednio warstwę sterownika urządzenia odpowiedzialną za fizyczną komunikację ze sprzętem. W przypadku implementacji specyficznej dla mikrokontrolerów rodziny stm32 ( tryb DMA ) implementacja interfejsu bazowego realizowana poprzez klasę stm32_spi_master_dma. Przykładowy kod tworzący obiekty potrzebne do pracy w trybie zgodności SPI jest nieco bardziej skomplikowany:
stm32::drv::spi_master_dma m_spi(SPI1,CONFIG_PCLK1_HZ, CONFIG_PCLK2_HZ);
drv::mmc::mmc_host_spi m_mmc_host( m_spi,11000 );
stm32_gpio m_pin;
drv::mmc::mmc_slot m_slot( m_mmc_host, m_pin );
W pierwszym etapie tworzony jest obiekt klasy kontrolera SPI, który w konstruktorze przyjmuje identyfikator fizycznego kontrolera SPI, oraz częstotliwości pracy magistral PCLK1 oraz PCLK2. Następnie tworzony jest obiekt kontrolera karty SD, który w konstruktorze jako referencję przyjmuje obiekt klasy kontrolera SPI, oraz częstotliwość pracy interfejsu wyrażoną w kHz. W dalszej części inicjalizacja wygląda identycznie jak w poprzednim przypadku: tworzony jest obiekt odpowiedzialny za obsługę pinu wykrywania karty, oraz obiekt slotu, który w konstruktorze przyjmuje referencję do kontrolera hosta SD oraz utworzonej wcześniej obiektu klasy stm32_gpio.
Przykład praktyczny
Celem zaprezentowania możliwości biblioteki przygotowano dwa identycznie działające przykłady na dwie różne platformy: STM32Butterfly z mikrokontrolerem STM32F107 bez kontrolera SD oraz ZL41ARM_F4 wyposażonym w jednostkę STM32F417, która ma wspomniany kontroler. Przykłady działają identycznie. Jedyną różnicą (poza szybkością komunikacji) jest wykorzystanie trybu SPI w zestawie STM32Buterfly oraz natywnego interfejsu SD w zestawie ZL41ARM_F4. Ponieważ żaden z zestawów nie ma gniazda SD dodatkowo będziemy musieli użyć minimodułu KamodMMC.
Działanie obu przykładów będzie polegało na:
- Oczekiwaniu na włożenie karty SD.
- Zamontowaniu systemu plików włożonej karty SD.
- Odczytanie pliku toread.txt i wyświetlenie jego zawartości na konsoli szeregowej.
- Zapis do plik towrite.txt krótkiego tekstu.
Podłączenie karty SD do zestawu. Aby uruchomić prezentowane przykłady należy podłączyć minimoduł Kamod- MMC do zestawów ewaluacyjnych. Moduł karty SD zaprojektowano do współpracy z mikrokontrolerami zasilanymi napięciem 5 V i w związku z zastosowaniem dodatkowego stabilizatora 3,3 V powinien być zasilany napięciem 5 V. W tabeli 1 przedstawiono opis wyprowadzeń minimodułu.
Minimoduł należy połączyć z zestawem za pomocą odpowiednich przewodów. Dla zestawu STM32Butterfly pracującym w trybie SPI obie płytki należy połączyć według informacji umieszczonych w tabeli 2.
W przypadku zestawu ZL41ARM_F4 wykorzystujemy tryb natywnej 4-bitowej magistrali SD, zapewniającej przy standardowej prędkości transmisji 25 MHz przepustowość 100 Mbps. W związku z tym minimoduł Kamod-MMC należy dołączyć do zestawu zgodnie z tabelą 3.
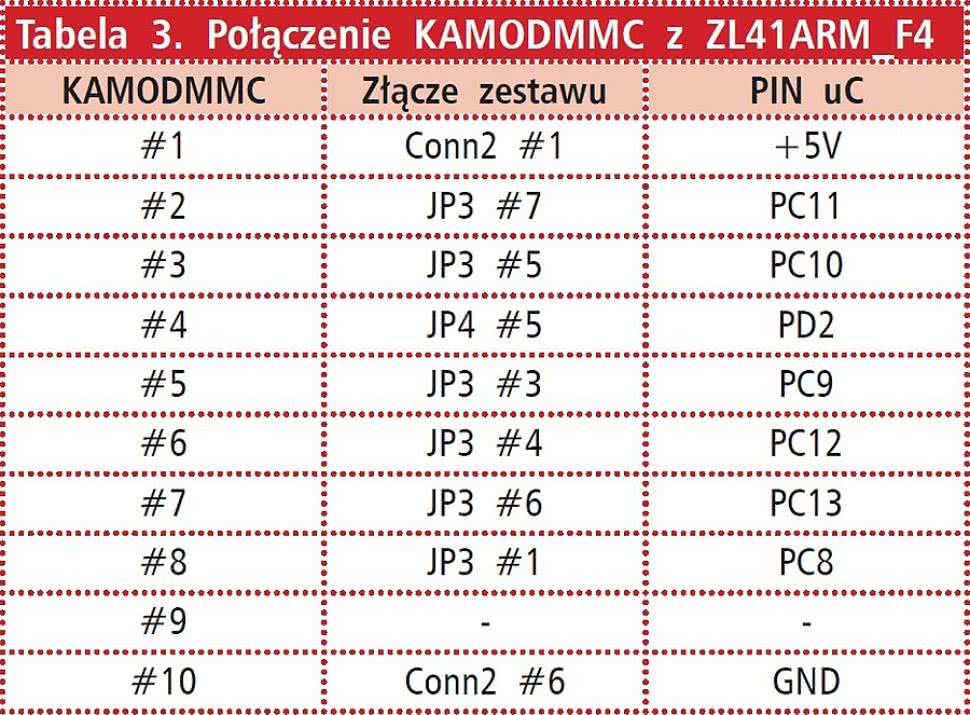
Tabela 3. Połączenie KAMODMMC z ZL41ARM_F4
Poza dołączeniem modułu gniazda zewnętrznej karty SD należy również podłączyć do komputera PC konsolę szeregową, na której wypisywany będzie rezultat działania naszej aplikacji. Konsola szeregowa została skonfigurowana do pracy z prędkością 115200, 8 bitów danych, 1 bit stopu. Po stronie PC możemy wykorzystać dowolny program terminalowy na przykład minicom. Dla zestawu STM32Buterfly linię danych TX konsoli stanowi port PD5 dostępny na pinie #6 złącza CONN1. Natomiast dla zestawu ZL41ARM_F4 linię danych TX stanowi również port PD5 który dostępny jest na pinie #4 złącza JP4.
Oprogramowanie - dostęp do plików w systemie FAT. Wszystkie przykłady zostały skompilowane z wykorzystaniem toolchaina GCC w wersji 4.8.2, który jest dostępny na mojej stronie internetowej pod adresem http://goo.gl/CZg2fP.
Przykłady dla obu zestawów zostało dołączone do wzorcowych projektów dla systemu ISIXRTOS dostępnych na stronie domowej projektu, oraz w dziale download na stronie EP.
Program demonstracyjny dla zestawu STM32BUTTERFLY jest umieszczony w katalogu advanced/fatsdio, natomiast przykład dla zestawu ZL41ARM_F4 znajduje się w katalogu stm32f4/fatsdio. Aby skompilować wybrany przykład, należy wejść do odpowiedniego katalogu, a następnie wydać polecenie make. Załadowanie programu do mikrokontrolera możliwe jest za pomocą interfejsu JTAG zgodnego z ocdlink (np. BF30) poprzez wywołanie polecenia make program. Możemy również posłużyć się fabrycznym bootloaderem i załadować skompilowane oprogramowanie z wykorzystaniem jednego z kanałów komunikacyjnych np. portu szeregowego. Ponieważ kod programu testowego jest podobny pomijając użycie innych klas dla kontrolera, oba przykłady zostaną omówione równocześnie.
Program rozpoczyna wykonanie of funkcji main(), w której tworzony jest statyczny obiekt klasy fat_tester, w której zaimplementowana została cała funkcjonalność. Klasą bazową dla klasy fat_tester stanowi klasa isix_task_base, implementującą zadanie systemu ISIX.
W przypadku wykorzystania kontrolera SD klasa fat_tester zawiera następujące obiekty prywatne:
stm32::drv::mmc_host_sdio m_mmc_host;
stm32_gpio m_pin;
drv::mmc::mmc_slot m_slot;
Ponieważ powyższe klasy nie posiadają konstruktorów domyślnych, ich konstruktory wywoływane są w konstruktorze klasy zawierającej wspomniane obiekty:
fat_test()
: task_base(STACK_SIZE,TASK_PRIO), m_mmc_host(config::PCLK2_HZ, 6000), m_slot( m_mmc_host, m_pin )
{
}
Pierwszy wywoływany jest konstruktor klasy bazowej, isix_task_base, który jako parametr przyjmuje rozmiar stosu dla zadania ISIX. Kolejno wywoływany jest konstruktor obiektu hosta magistrali SD m_mmc_ host, który jako argumenty przyjmuje prędkość magistrali PCLK2 oraz częstotliwość pracy magistrali SD. Następnie wywoływany jest konstruktor klasy slotu, który jako argumenty przyjmuje referencję do obiektu kontrolera SD oraz klasy stm32_gpio odpowiedzialnej za detekcję obecności karty.
Dla przykładu dla z zestawem STM32Butterfly demonstrującym tryb zgodności SPI klasa fat_test zawiera następujące obiekty prywatne:
stm32::drv::spi_master_dma m_spi;
drv::mmc::mmc_host_spi m_mmc_host;
stm32_gpio m_pin;
drv::mmc::mmc_slot m_slot;
Jedyną różnicą pomiędzy przykładem przeznaczonym dla mikrokontrolera STM32F1 a wersją dla STM32F4 jest to, że zamiast klasy mmc_host_sdio tworzony jest kontroler mmc_host_spi pracujący w trybie SPI. Dodatkowo tworzony jest obiekt spi_master_ dma, który stanowi sterownik dla SPI. Inicjalizacja klas zawartych w klasie fat_tester realizowana jest podobnie jak poprzednio:
//Constructor
fat_tester()
: task_base(STACK_SIZE,TASK_PRIO), m_spi(SPI1,CONFIG_PCLK1_HZ, CONFIG_PCLK2_HZ),
m_mmc_host( m_spi,11000 ), m_slot(m_mmc_host, m_pin )
{
}
Najpierw inicjalizowany jest obiekt odpowiedzialny za obsługę SPI który jako parametry przyjmuje numer kontrolera sprzętowego oraz prędkości z jaką pracuje magistrala APB1 oraz APB2. Konstruktor obiektu klasy hosta SPI m_mmc_host przyjmuje referencję do klasy m_spi, oraz prędkość z jaką ma pracować magistrala komunikacyjna. Podobnie jak poprzednio ostatnią czynnością jest przekazanie referencji do obiektu m_pin, oraz m_mmc_host do obiektu m_slot klasy mmc_slot. Po zakończeniu działania konstruktorów oraz po zakończeniu inicjalizacji systemu scheduler rozpocznie wykonywanie metody main() klasy fat_tester, w której zawarty jest kod demonstracyjny. Kod jest identyczny dla obu platform. Zamieszczono go na listingu 1.

Listing 1. Przykładowy program – dostęp do plików w systemie FAT
Metoda rozpoczyna działanie od wywołania funkcji add_disc biblioteki fatFS odpowiedzialnej za obsługę systemu plików FAT. Jako argumenty przekazywane są kolejno numer logiczny dysku, oraz wskaźnik do obiektu klasy slotu. Po dodaniu dysku do biblioteki program wywołuje metodę check() klasy mmc_slot, której deklaracja wygląda następująco:
//Wait for change status
int check( int timeout = isix::ISIX_TIME_INFINITE );
Zadaniem tej metody jest oczekiwanie na zmiany statusu dostępności karty metoda ta zwraca wartość card_inserted, lub card_removed w zależności od zmiany statusu karty, lub wartość isix::ETIMEOUT w przypadku gdy w podanym czasie nie wystąpiła zmiana statusu karty. W [1] sprawdzamy czy karta jest dostępna, i jeśli metoda check() zwróci wartość card_inserted, wówczas wywoływana jest funkcja f_mount() biblioteki FATFS. Zadaniem tej funkcji jest zamontowanie oraz inicjalizacja systemu plików. Jeśli proces montowania przebiegł poprawnie, wówczas w [3] otwierany jest plik toread.txt. Jeśli również ta operacja przebiegła bezbłędnie w [4], odczytywana jest do bufora zawartość fragmentu pliku, która następnie za pomocą funkcji tiny_printf() wyświetlana jest na konsoli szeregowej. Po odczytaniu całości pliku wywoływana jest funkcja f_close() , oraz wyświetlany jest status zamknięcia pliku. W [5] otwierany jest nowy plik write.txt w trybie do zapisu, a następnie wyświetlany jest status otwarcia pliku. Jeżeli funkcja otwarcia się powiedzie, wówczas za pomocą f_write() do pliku wpisywana jest zawartość bufora wstr. Po zakończeniu zapisu plik jest zamykany (funkcja f_close ), po czym cały cykl rozpoczyna się od początku.
Pomimo stosunkowo skomplikowania implementacji biblioteki użytkowanie z punktu widzenia użytkownika końcowego jest trywialne i sprowadza się do utworzenia kilku obiektów, a następnie skorzystaniu z funkcji dostępu do plików biblioteki fatFS. Poza momentem tworzenia obiektów kontrolera obsługa kart SD za pomocą opisanej biblioteki jest identyczna bez względu czy karta pracuje w trybie SD czy w trybie kompatybilności SPI.
Oprogramowanie - dostęp do karty na poziomie sektorów
Dla dużej części użytkowników, użytkowanie karty SD na poziomie plików systemu FAT będzie wystarczające. Jednak w niektórych przypadkach, przy implementacji własnego systemu plików, lub podczas zapisu danych na kartę bezpośrednio w trybie surowym RAW, przydatny może być interfejs na poziomie dostępu do sektorów. Aby uzyskać fizyczny dostęp do karty należy najpierw sprawdzić (lub poczekać na dostępność karty SD co realizujemy za pomocą wywołania omówionej wcześniej metody check() klasy mmc_slot. Jeśli metoda zwróci wartość card_inserted należy pobrać obiekt klasy mmc_card na którym będziemy wykonywać operację odczytu i zapisu, co zapewnia metoda:
//Get card status
int get_card( mmc_card* &card );
Przyjmuje ona referencję do wskaźnika na obiekt klasy mmc_card i w przypadku powodzenia wskaźnikowi temu przypisuje adres obiektu karty SD. Operując bezpośrednio na obiekcie tej klasy za pomocą odpowiednich metod możemy uzyskać dostęp do informacji o karcie czy odczytywać i zapisywać poszczególne sektory. Do najważniejszych metod zaliczamy:
/* Get card capacity */
uint32_t get_sectors_count() const
Metoda zwraca ilość sektorów dostępnych na karcie
/* Get sector size */
size_t get_sector_size() const
Metoda zwraca wielkość pojedynczego sektora.
/* Get card CID */
int get_cid( cid &c ) const;
Metoda zwraca strukturę cid zawierającą dane producenta karty , w przypadku powodzenia zwraca wartość success (0) lub inny kod błędu w przypadku niepowodzenia.
/** Write the block */
int write( const void* buf, unsigned long sector, std::size_t count );
Metoda write zapisuje dane zawarte w buforze wskazywanym przez buf pod początkowy sektor o adresie zawartym w parametrze sector, oraz ilości sektorów zawartych w parametrze count. W przypadku powodzenia zwraca wartość success (0), lub inny kod błędy w przypadku niepowodzenia.
/** Read the block */
int read( void* buf, unsigned long sector, std::size_t count );
Metoda read pozwala odczytać zawartość sektorów karty i przesłać je do bufora. Parametr buf zawiera wskaźnik na bufor, do którego będą przekazane dane, parametr sector zawiera adres pierwszego sektora, natomiast parametr count zawiera liczbę sektorów do odczytania. W przypadku powodzenia zwraca wartość sucess (0), lub kod błędy w przypadku niepowodzenia.
Uwagi końcowe. Kilka praktycznych uwag na temat wydajności zapisu i odczytu
Zaprezentowana biblioteka systemu ISIX pozwala prosty dostęp do obsługi kart SD z poziomu użytkownika uniezależniając aplikację od zastosowanego interfejsu komunikacyjnego. Uwalnia ona użytkownika od żmudnego oprogramowywania komunikacji z kartą i umożliwia przygotowanie aplikacji karty SD w bardzo krótkim czasie. Dzięki integracji z ISIX-em biblioteki fatFS dostępnej na licencji Open Source, dostajemy dostęp do systemu plików FAT, dzięki czemu dane zapisywane na karcie, będą dostępne dla systemu operacyjnego w komputerze PC.
Praktyczne próby wykazały, że komunikacja za pośrednictwem natywnej 4-bitowej magistrali SD zapewnia dużo większą wydajność niż w przypadku pracy w trybie kompatybilności SPI.
Dodatkowego komentarza wymaga wielkość bufora pamięci RAM wykorzystywanego do zapisu oraz odczytu sektorów. W przypadku odczytu już bufor o wielkości pojedynczego sektora zapewnia przyzwoitą wydajność. Zwiększanie rozmiaru bufora podnosi wydajność z uwagi na mniejszy narzut na przygotowanie transferu, np. przeprogramowanie kontrolera DMA. Jednak zmiany wielkości bufora nie powodują drastycznych zmian wydajności. Zupełnie inaczej wygląda sprawa zapisu danych. W tym przypadku rozmiar bufora sektorów ma drastyczny wpływ na wydajności i fizycznie związany jest z rozmiarem strony pamięci Flash karty SD. Jeśli rozmiar bufora będzie dużo mniejszy niż rozmiar strony pamięci FLASH wówczas kontroler będzie musiał dzielić każdy transfer na części wykonywać dodatkowe operacje kasowania, i przeprogramowywania sektora, co ma drastyczny wpływ na wydajność oraz trwałość karty. Im karta pamięci posiada większy rozmiar tym strona pamięci FLASH jest większa i może nawet przyjmować wielości rzędu 128 kB i więcej dla kart 16 lub 32 GB. Z uwagi na to, iż pracując jedynie na wewnętrznych zasobach mikrokontrolera pamięć RAM jest deficytowym zasobem, dużo lepsze rezultaty przyniesie przy zapisie zastosowanie kart o stosunkowo niewielkiej z dzisiejszego punktu widzenia pojemności np. 2 GB
W zaprezentowanym przykładzie istnieje możliwość praktycznych prób wydajności poszczególnych kart podczas odczytu czy zapisu, poprzez utworzenie w aplikacji głównej obiektu klasy mmc_host_tester. Klasa ta przeprowadza szereg odczytów i zapisów fizycznych sektorów dla różnych wielkości bufora i wyświetla na ekranie prędkość, z którą została wykonana dana operacja. UWAGA! Test ten jest destruktywny dla danych zawartych na karcie, i po jego uruchomieniu dane zawarte na karcie zostaną utracone, a karta będzie wymagała ponownego sformatowania.
Lucjan Bryndza, EP












