 Zaloguj
Zaloguj



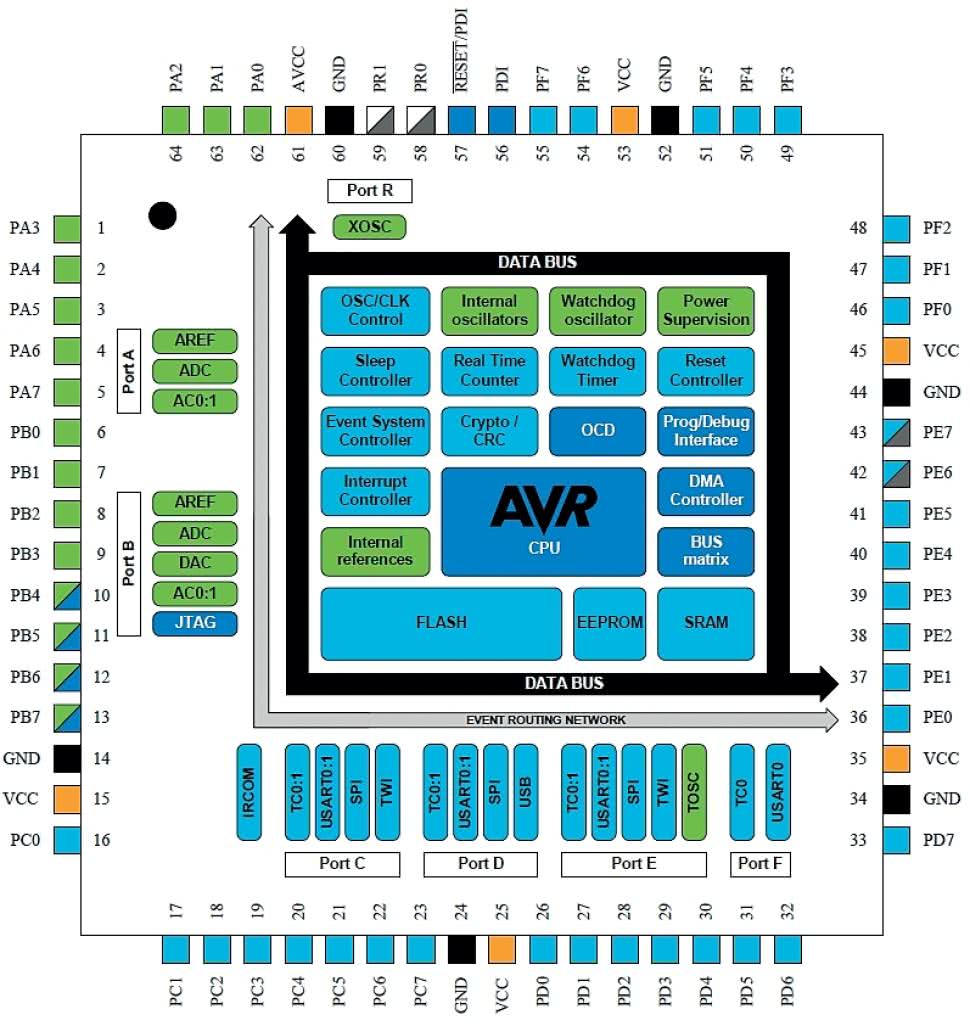
Rysunek 1. Schemat blokowy mikrokontrolera z wyszczególnionymi peryferiami
W mikrokontrolerach Xmega timery są związane z portami I/O. Spójrzmy na schemat blokowy mikrokontrolera ATxmega128A3U pokazany na rysunku 1. Timery oznaczone są skrótem TC od Timer/Counter. Z portami C, D, E związane są dwa timery o numerach 0 i 1, a w porcie F mamy tylko jeden timer o numerze 0. Numer oznacza typ timera. Aby skonfigurować te timery, musimy odwoływać się do nich używając ich nazw, które są następujące: TCC0, TCC1, TCD0, TCD1, TCE0, TCE1, TCF0. Przyporządkowanie portom oznacza, że wejścia i wyjścia timera, takie jak PWM czy przechwytywanie, dostępne są na określonych pinach portu, który jest związany z timerem.
Wszystkie timery typu 0 i 1 w mikrokontrolerach XMEGA są 16-bitowe, a więc mogą liczyć od 0 do 65535. Korzystając z systemu zdarzeń (który będzie opisany w późniejszych odcinkach) możemy timery łączyć ze sobą, co pozwala na uzyskanie timera o długości nawet 112 bitów. W nowszych modelach Xmega z rodziny AU możemy timery 16-bitowe podzielić na dwa niezależne timery 8-bitowe, które nazywamy timerami typu 2. W ten sposób z 7 timerów możemy uzyskać aż 14 timerów w jednym procesorze (a cały czas omawiamy ATxmega128A3U, modele A1U mają jeszcze więcej peryferiów).
Warto wiedzieć, że każdy timer może liczyć w górę lub w dół, w zależności od naszych potrzeb, a zmianę kierunku liczenia wywołuje się ustawiając odpowiedni bit w rejestrze konfiguracyjnym.
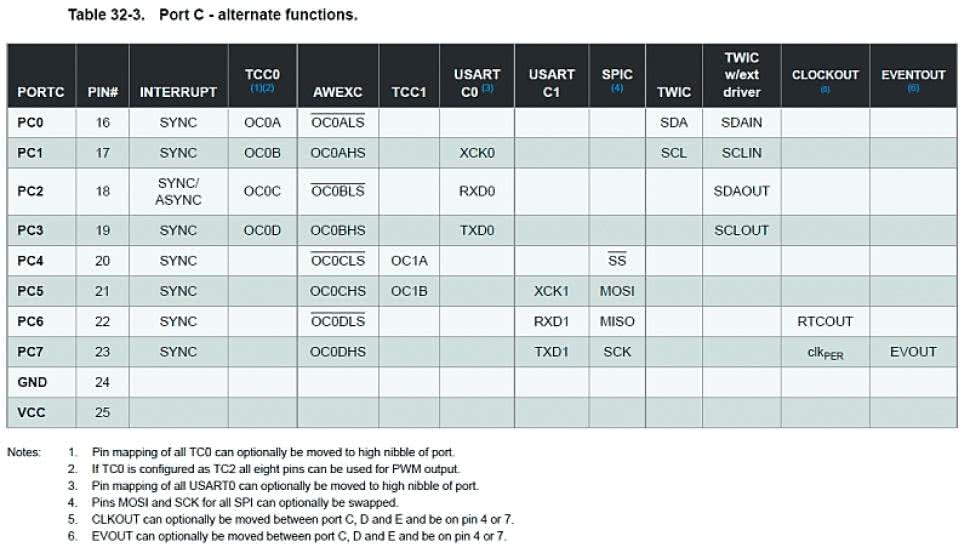
Rysunek 2. Przyporządkowanie wyjść OCx timerów portu C
Timery mają szereg rejestrów i zanim zaczniemy pisać programy, poznajmy najważniejsze z nich:
- CNT - jest to rejestr przechowujący aktualną wartość timera, która zwiększa się lub zmniejsza z każdym taktem sygnału sterującego timer (od counter).
- PER - rejestr PER (od period) wyznacza maksymalną wartość, którą timer może osiągnąć. Zatem, jeśli PER=10, to timer będzie liczył od 0 do 10, a więc przepełnienie będzie następowało co 11 cykli. Po włączeniu zasilania PER domyślnie jest ustawiany na wartość 65535. W przypadku, kiedy timer liczy w dół, rejestr PER określa wartość początkową, od której timer liczy do zera.
- CCx - rejestry te są wykorzystywane do funkcji Compare/Capture czyli porównania i przechwytywania. Porównywanie wykorzystuje się do generowania sygnałów PWM. Rejestr CNT jest bezustannie porównywany z CCx, a w zależności od tego który z tych rejestrów ma większą wartość, ustalany jest stan logiczny odpowiedniego pinu OCx (zobacz kolumny TCC0 i TCC1 w tabeli na rysunku 2). Przechwycenie polega na zapisaniu wartości rejestru CNT do CCx w chwili wystąpienia określonego zbocza sygnału na wybranej nóżce procesora. Warto zaznaczyć, że XMEGA nie mają dedykowanych do tego celu wejść ICP, tak jak ATmega, lecz możemy wybrać dowolny pin procesora poprzez system zdarzeń. Timery typu 0 mają cztery kanały porównania/przechwycenia o nazwach CCA, CCB, CCC, CCD, a timery typu 1 mają tylko CCA i CCB (schematyczną budowę timera przedstawiono na rysunku 3).
- CTRLx - są to rejestry konfiguracyjne.
- INTCTRLx - rejestry konfigurujące przerwania.
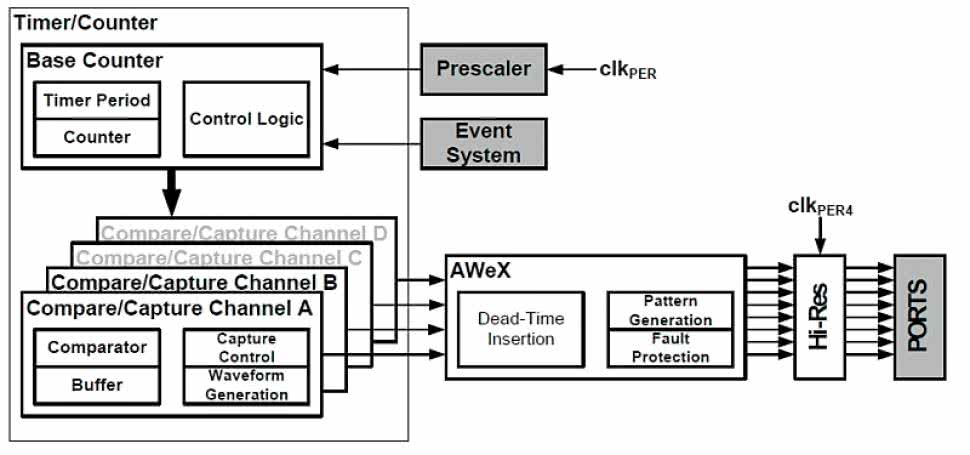
Rysunek 3. Schematyczna budowa timera
Timery w mikrokontrolerach XMEGA mogą być taktowane sygnałem z systemu dystrybucji sygnałów zegarowych lub mogą pochodzić z systemu zdarzeń. System zdarzeń daje bardzo duże możliwości i jest to temat na osobny artykuł. Sygnał zegarowy możemy podzielić preskalerem, podobnie jak w ATmega. Przepełnienie licznika oraz wystąpienie zdarzeń CCx może generować przerwanie lub zdarzenie dla systemu zdarzeń oraz DMA.
Z bardziej wyrafinowanych możliwości timerów w mikrokontrolerach ATxmega należy wyszczególnić:
- tryby pracy umożliwiające pomiar częstotliwości, okresu i wypełnienia sygnału zegarowego, doprowadzonego do dowolnego pinu procesora,
- PWM z korekcją fazy i częstotliwości,
- współpraca z DMA,
- dodatki rozszerzające rozdzielność PWM,
- sprzętowa obsługa enkoderów,
- układ AWEX umożliwiający generowanie sygnałów np. do sterowania silnikami elektrycznymi, kontrolę czasu martwego,
- XMEGA Custom Logic dostępne w modelach serii E, które są bardzo prostym odpowiednikiem komórek logicznych układów FPGA, umożliwiające uzyskanie np. sygnałów modulowanych.
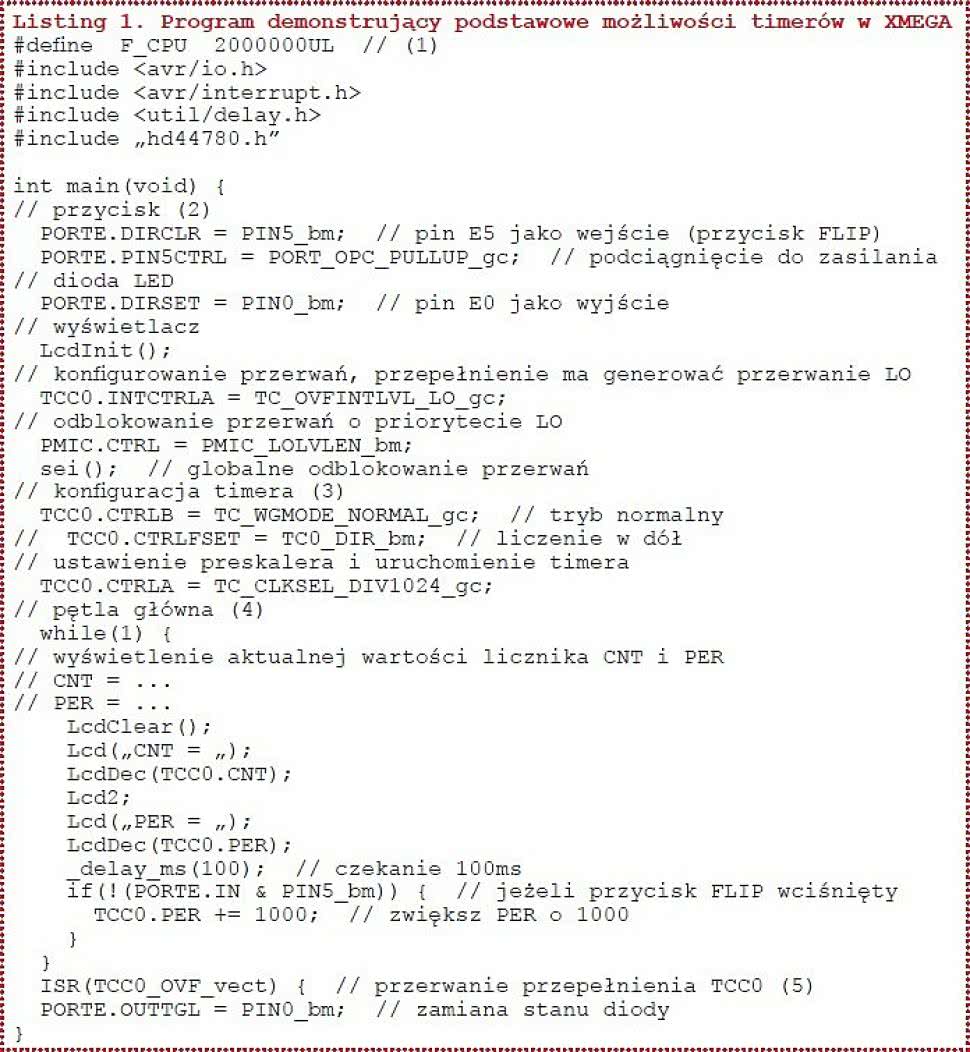
Listing 1. Program demonstrujący podstawowe możliwości timerów w XMEGA |
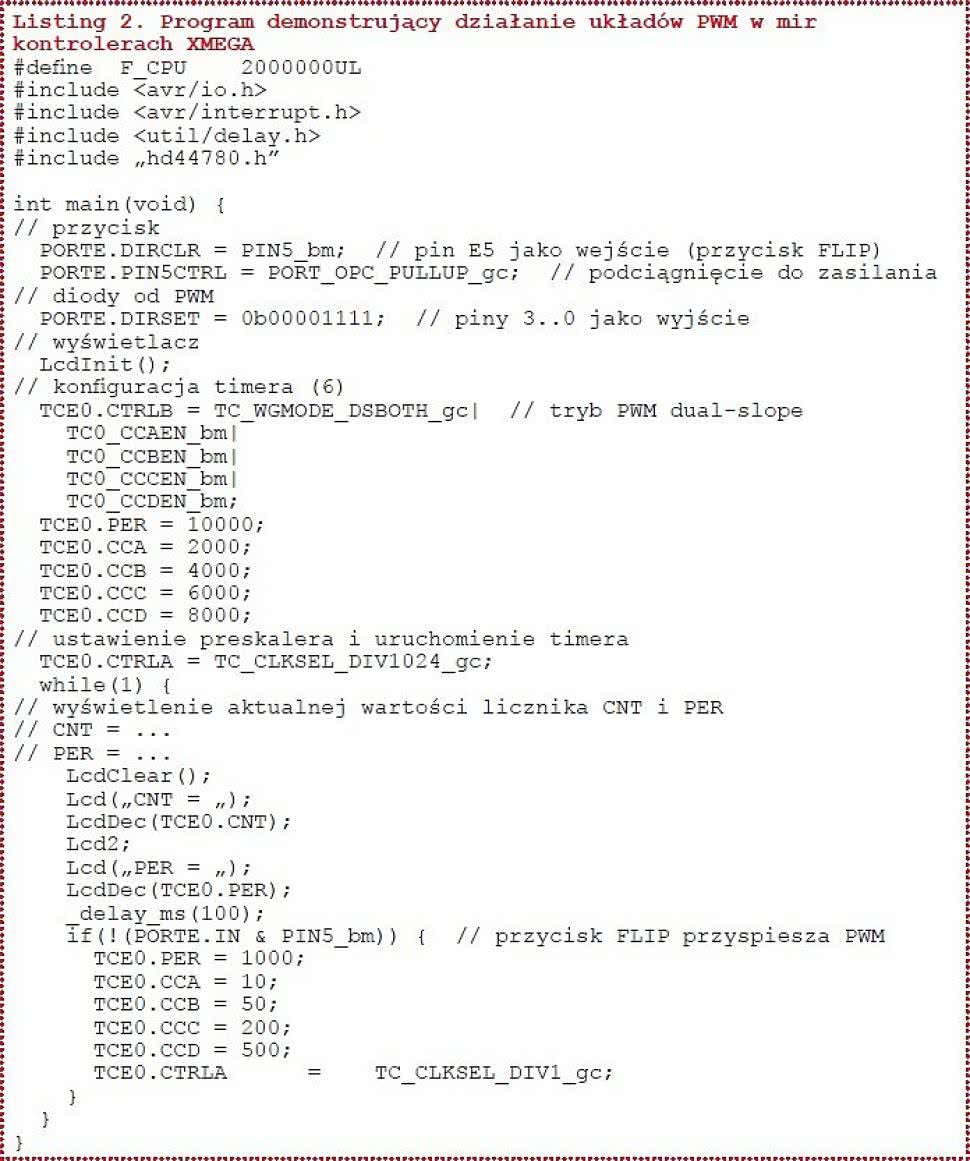
Listing 2. Program demonstrujący działanie układów PWM w mir kontrolerach XMEGA |
Prostsze możliwości timerów Xmega poznamy w kilku kolejnych odcinkach kursu, a czytelników zainteresowanych wykorzystaniem bardziej zaawansowanych funkcji odsyłam do książki Tomasza Francuza AVR. Praktyczne projekty, w której zostały szczegółowo opisane.
Podstawowe operacje i przerwania
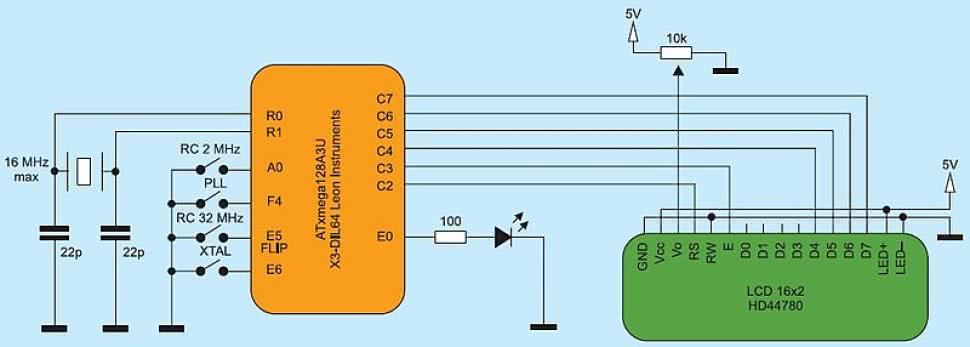
Rysunek 4. Schemat układu demonstrującego pracę timera
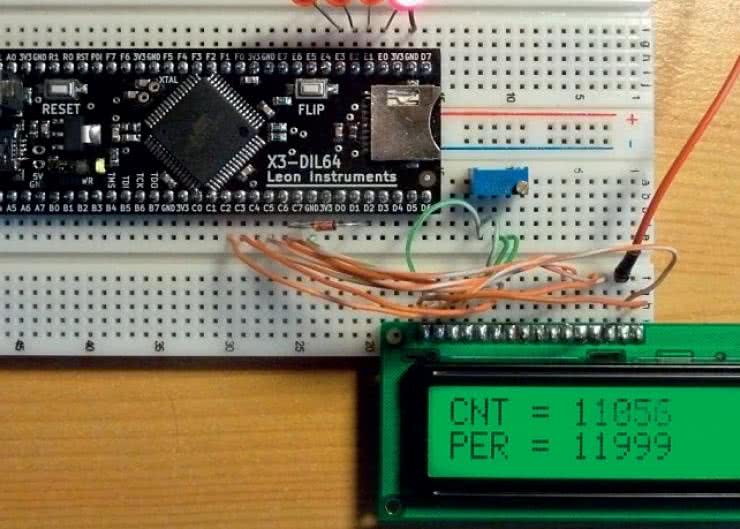
Aby zapoznać się z podstawami pracy timerów, napiszemy program demonstrujący działanie timera TCC0 oraz jego rejestru PER i systemu przerwań. Po włączeniu zasilania, rejestr CNT timera TCC0 rozpocznie zliczanie w górę, aż do osiągnięcia wartości PER, która domyślnie jest ustawiona na 65535. Wartość tę można będzie zmienić przyciskiem FLIP, który jest na płytce X3-DIL64. Aby było wiadomo, jakie aktualnie wartości są w rejestrach licznika CNT oraz PER, będziemy odczytywać je z wyświetlacza LCD. Dodatkowo, każde zrównanie się rejestrów CNT oraz PER wywoływać będzie przerwanie przepełnienia OVF, co spowoduje zmianę stanu diody podłączonej do pinu E0.
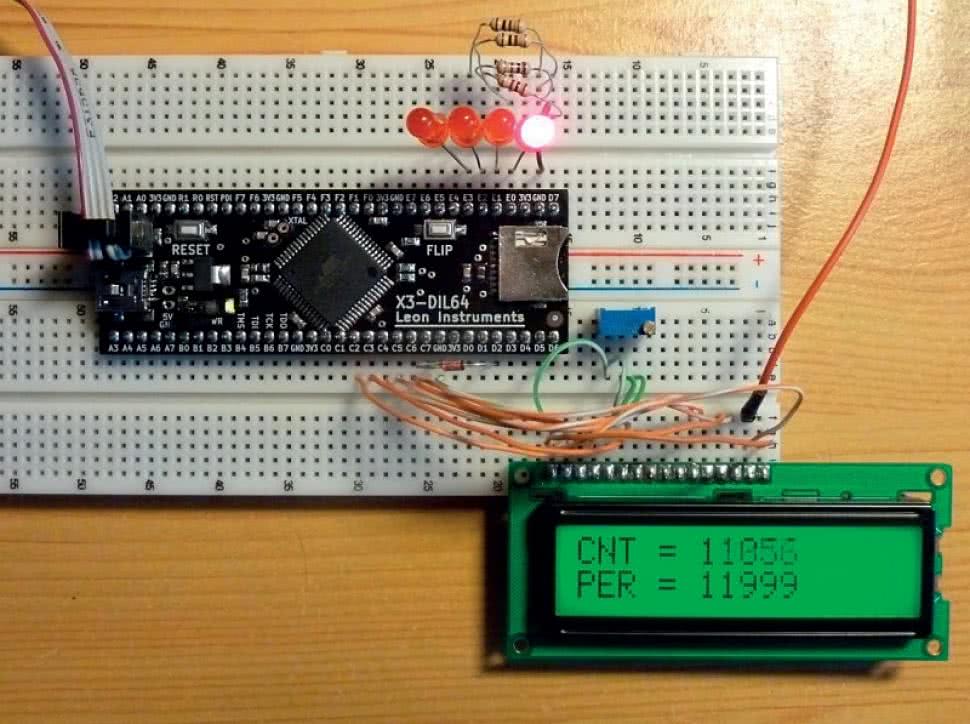
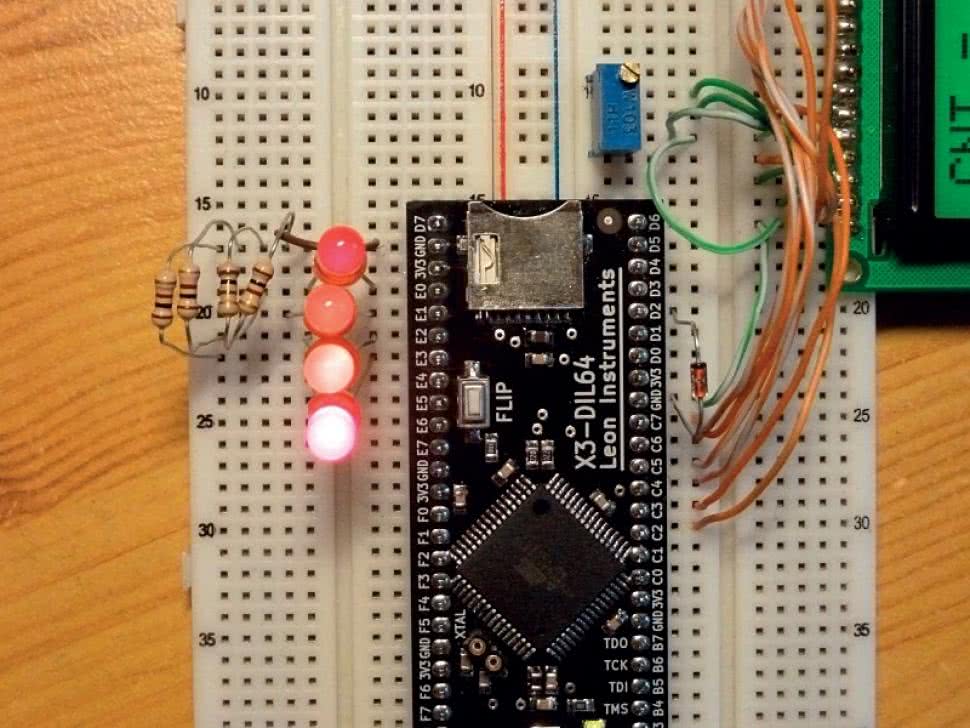
Fotografia 5. Zdjęcie układu zbudowanego na płytce stykowej
Zbudujemy układ, którego schemat przedstawiono na rysunku 4, a jego realizację na płytce stykowej przedstawia fotografia 5. Układ ten posłuży do demonstracji działania generatorów PWM, opisanych w dalszej części artykułu.
Program zamieszczono na listingu 1, a ważniejsze instrukcje zostały opisane. Program zaczynamy, jak zwykle, od dołączenia potrzebnych bibliotek (1). Bibliotekę hd44780 można ściągnąć z serwera FTP Elektroniki Praktycznej lub skopiować z załączonej płyty CD.
Jako że nie będziemy używać żadnych funkcji ani zmiennych globalnych, od razu przechodzimy do pisania funkcji main(), w której na początku ustawimy wejście i wyjścia zgodnie z pierwszą częścią kursu, zamieszczoną w EP 2013/11. Fragment odpowiedzialny za inicjalizację podstawowych peryferiów to (2).
Ustawimy kontroler przerwań PMIC. Jak działają przerwania w Xmega opisałem w EP 2013/12. Podobnie jak w każdym innym typie przerwania, możemy ustalić priorytet niski (LO), średni (MED) lub wysoki (HI). Po wybraniu priorytetu dla przerwania przepełniania OVF, musisz również uaktywnić przerwania o tym priorytecie, wpisując PMIC_xxLVLEN_bm do rejestru CTRL kontrolera przerwań PMIC.
Rysunek 6. PWM single slope
Przejdźmy do skonfigurowania timera TCC0 (fragment 3 listingu). W rejestrze CTRLB wybieramy normalny tryb pracy. Do rejestru CTRLF nie możemy wpisać danych wprost, jak do innych dotychczas używanych. Można wpisywać do niego wartości poprzez rejestry pomocnicze CTRLFSET oraz CTRLFCLR. Działa to podobnie jak przy ustawianiu portów, co robiliśmy na początku programu. Jedynki wpisane do rejestru SET zostaną wpisane do rejestru CTRLF, a jedynki wpisane do rejestru CLR zostaną w CTRLF wyzerowane. Dzięki takiemu rozwiązaniu nie musimy stosować masek bitowych ani operatorów |= ani &=. Przy pomocy bitu TC0_DIR_bm w rejestrze CTRLF decydujemy, czy timer ma liczyć w górę czy w dół. Ostatnim etapem konfiguracji timera jest wybranie źródła sygnału. Wybieramy sygnał zegarowy o częstotliwości wstępnie podzielonej przez 1024 za pomocą stałej TC_CLKSEL_DIV1024_gc. Po tym poleceniu timer zostaje uruchomiony.
W pętli głównej (4) program będzie wyświetlał bieżącą wartość przechowywaną w rejestrach CNT oraz PER. Dodatkowo, jeśli przycisk FLIP zostanie wciśnięty, to rejestr PER będzie zwiększał się o 1000.
Do opisania pozostała tylko procedura przerwania przepełnienia TCC0_OVF_vect (5). Składa się z zaledwie jednej linijki, która zamienia stan pinu E0. Jeśli przez zgłoszeniem dioda się świeciła, to zgaśnie, a jeśli była wygaszona, to się zaświeci.
Układy PWM

Rysunek 7. PWM dual slope
PWM to skrót od Pulse Width Modulation czyli modulacja szerokości impulsu. Generowany jest sygnał o stałej amplitudzie i częstotliwości, a zmieniać może się jedynie współczynnik wypełnienia. Dzięki takiemu zabiegowi można bardzo łatwo sterować różnymi urządzeniami: prędkością silnika, jasnością żarówki lub diody LED.
Mikrokontrolery Xmega mają możliwość wygenerowania jednocześnie bardzo wielu sygnałów PWM. Timer typu 0 może generować cztery takie sygnały, a typ 1 może tylko dwa. Jednak mając do dyspozycji cztery timery typu 0 oraz trzy timery typu 1, możemy uzyskać aż 22 kanały PWM. W nowszych XMEGA (takich jak np. ATxmega128A3U) timery 16-bitowe można podzielić na 8-bitowe timery typu 2, a każdy z nich ma 4 kanały. W końcowym rozrachunku można mieć nawet 32 kanały PWM!
Jeśli wiesz jak działa PWM - przeskocz kilka akapitów i zacznij czytać opis kodu programu.
Timer generujący PWM może pracować w trybie single slope, czyli licząc zawsze w tym samym kierunku albo może pracować w trybie dual slope, czyli liczyć naprzemiennie w górę i w dół.
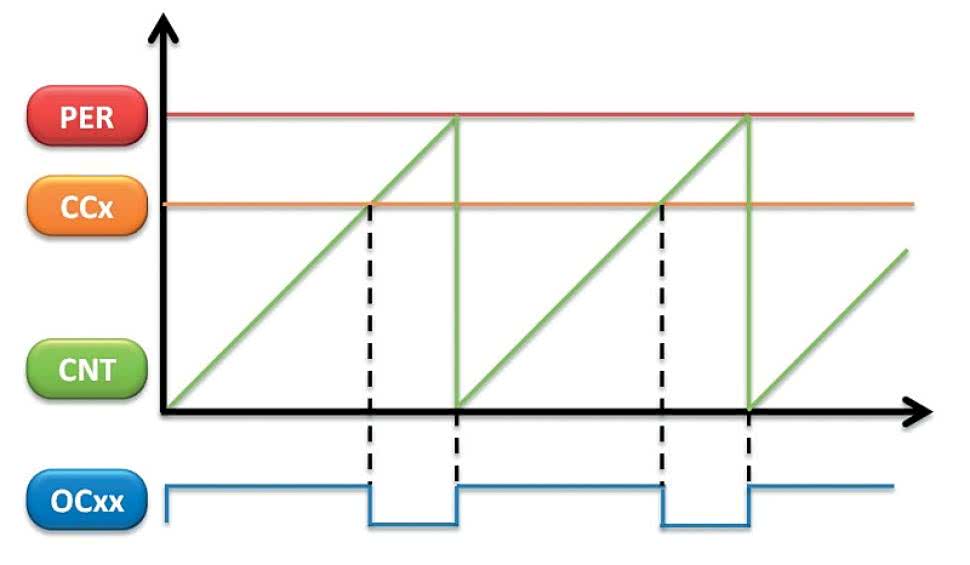
W trybie single slope timer zaczyna liczyć od zera do wartości określonej w rejestrze PER. Kiedy rejestr licznika CNT i PER zrównają się, wówczas CNT zostaje wyzerowany i timer zaczyna liczyć od początku. Sygnał PWM dostępny jest na nóżce OCxx. Na początku cyklu, na pinie OCxx jest stan logiczny wysoki. W chwili, kiedy rejestr CNT zrówna się z liczbą wpisaną do rejestru CCX, wówczas pin OCxx ustawia się w stan niski i pozostaje tak do końca cyklu. Wykresy czasowe takiej sytuacji zostały przedstawione na rysunku 6.
Rysunek 8. Opis rejestru CTRLB
W trybie dual slope, timer liczy od zera do wartości PER, a potem zmienia kierunek liczenia i wraca do zera. Zmiana stanu pinu OCxx dokonuje się w chwili zrównania się rejestrów CNT i CCx, jednak zależy jeszcze od kierunku liczenia timera. Gdy timer liczy w górę, przy zrównaniu się, stan pinu OCxx zmienia się z wysokiego na niski, a w przypadku liczenia w dół jest odwrotnie. Aby opis był bardziej zrozumiały zamieściłem rysunek 7.
Należy mieć na uwadze, że częstotliwość sygnału będzie dwukrotnie mniejsza niż przy identycznie ustawionym trybie single slope, ponieważ cykl pracy jest dwukrotnie dłuższy.
Tryb dual slope czasami nazywany jest określeniem PWM z korekcją fazy. Czym on się różni od single slope? Niektórzy twierdzą, że jest lepszy i wynika to z teorii sygnałów… Otóż, jeśli wykorzystujemy tylko jeden kanał timera, to w obu trybach możemy uzyskać całkowicie identyczny sygnał. Różnica jest wtedy, gdy jeden timer kontroluje kilka kanałów PWM, a tym samym kilka odbiorników. W przypadku single slope, na początku cyklu wszystkie odbiorniki, którymi sterujemy, włączają się jednocześnie. Bardzo często PWM wykorzystywany jest do sterowania urządzeniami dużej mocy. Jednoczesne załączenie kilku takich urządzeń może powodować spadki napięć na szynach zasilających. Nie bez powodu mówi się, że PWM sieje zakłóceniami. Rozwiązaniem problemu jest zastosowanie PWM dual slope. Spójrz jeszcze raz na rysunek 2 - w tym przypadku w danej chwili otwierany lub zamykany jest tylko jeden z trzech kanałów PWM. Z pewnością ograniczy to zakłócenia generowane przez PWM.
Przejdźmy wreszcie do pisania programu, przedstawionego na listingu 2. Po włączeniu zasilania, uruchomione zostaną cztery kanały PWM, do których podłączymy diody LED. Aby zaobserwować jak działa PWM, po starcie programu będzie on skonfigurowany z bardzo dużym preskalerem. Dopiero po wciśnięciu przycisku FLIP zostanie uruchomiona normalna prędkość pracy, a poszczególne diody LED będą świecić się z różną jasnością.
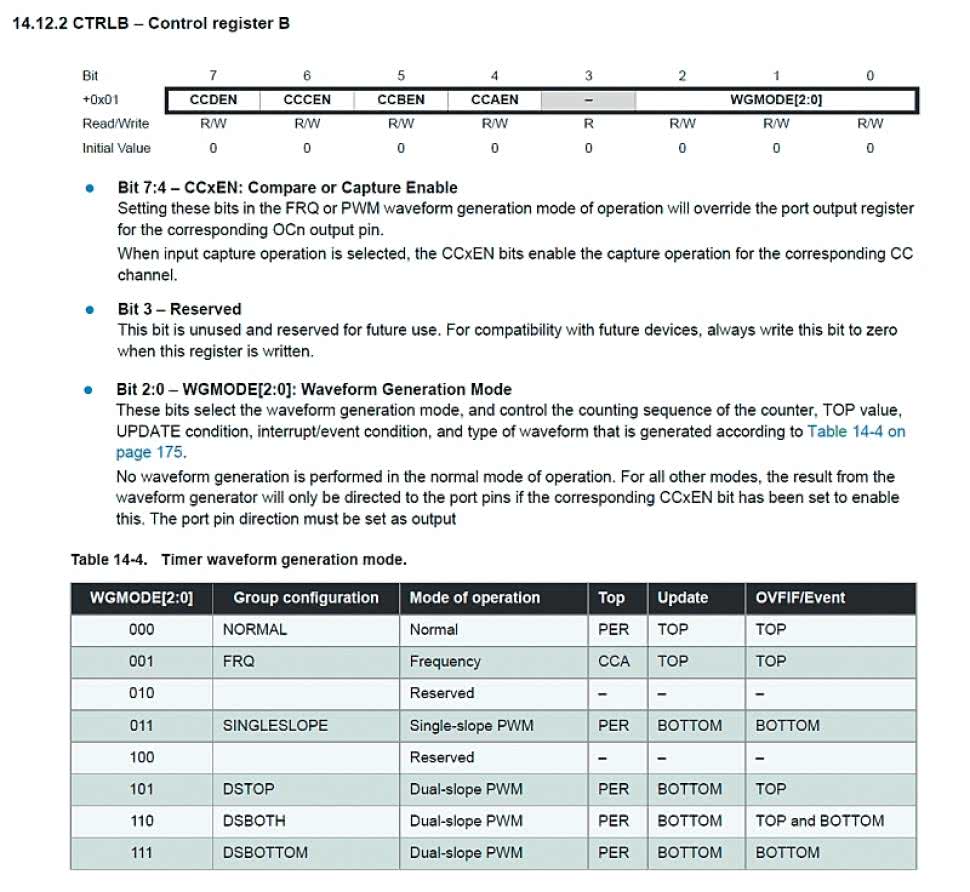
Aby móc skorzystać z dobrodziejstw PWM, musimy nieco inaczej skonfigurować timer, a w szczególności jego rejestr CTRLB - spójrzmy na fragment dokumentacji przedstawiony na rysunku 8.
Fotografia 9. Diody świecące z różną jasnością
Grupa konfiguracyjna WGMODE odpowiada za tryb pracy timera. Wcześniej wykorzystaliśmy tryb TC_WGMODE_ NORMAL_gc. PWM możemy generować przy pomocy czterech trybów - jednego single-slope, w którym timer cały czas zlicza w tym samym kierunku oraz trzech trybów dual- -slope. Tryby dual-slope różnią się jedynie chwilami, w których zostanie zgłoszone przerwanie przepełnienia licznika. Ponieważ przerwań w niniejszych przykładzie nie wykorzystujemy, to możemy wybrać dowolny tryb dual-slope (6).
Oprócz tego, w rejestrze CTRLB musimy wybrać, które kanały CCx zamierzamy wykorzystać, wpisując do rejestru odpowiednie stałe TC0_CCxEN_bm, gdzie x oznacza wybór kanału A, B, C oraz D. To wystarczy, aby timer zaczął generować sygnały PWM (oczywiście odpowiednie piny muszą być skonfigurowane w rejestrze DIR jako wyjście).
Po uruchomieniu programu, świecą się wszystkie diody, a rejestr CNT licznika jest oczywiście wyzerowany. Zwróć uwagę na wskazania wyświetlacza. Kiedy licznik CNT przekroczy 2000 to zgaśnie dioda podłączona do pinu E0, bo steruje nią kanał A, którego rejestr CCA wynosi 2000. W ten sposób po kolei wszystkie diody mają zgasnąć, aż licznik osiągnie wartość 10000 i zacznie liczyć w dół. Diody będą się po kolei zapalać. Po wciśnięciu przycisku FLIP, preskaler timera zmienimy na 1 zamiast 1024 i ustawimy nieco inne wartości CCx. Dzięki temu będziemy mieć wrażenie, że diody świecą się z różną jasnością, choć rzeczywistości odbywa się podobny proces, jaki oglądaliśmy przed chwilą, ale z dużo większą prędkością. Działanie programu przedstawia fotografia 9.
Dominik Leon Bieczyński
www.leon-instruments.pl












