Zaloguj
Zaloguj



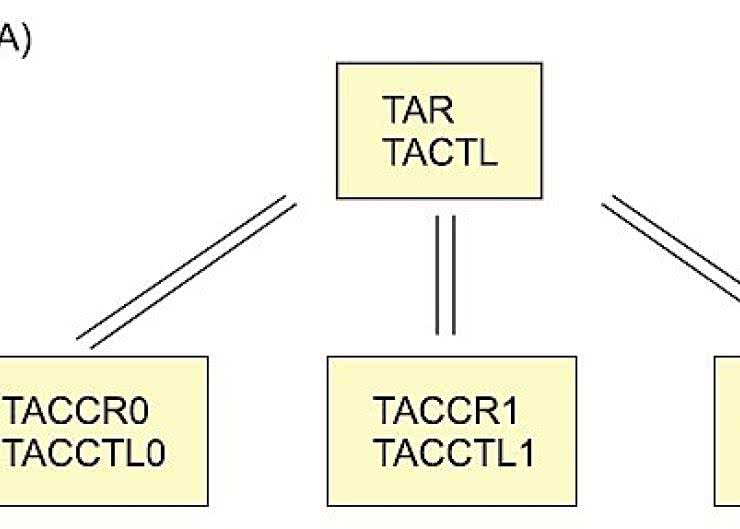

Rysunek 1. Licznik TAR i rejestry TACCRx. Rejestr TACTL – konfiguracja pracy licznika TAR. Rejestry TACCTLx konfiguracja pracy rejestrów TACCRx
Zainstalowany w module Komputerek mikrokontroler MSP430f1232 ma 16-bitowy licznik TAR, który współpracuje z rejestrami TACCR0, TACCR1, TACCR2. Rejestry TACCRx mogą pracować w trybie porównywania - Compare, albo w trybie przechwytywania - Capture. Licznik TAR i rejestry w trybie porównującym mogą być użyte do odmierzania czasu. Można ich także użyć do generowania sygnałów wyjściowych np. impulsów PWM.
Licznik TAR i rejestry w trybie przechwytywania mogą być użyte do pomiar czasu trwania impulsu, pomiaru czasu pomiędzy impulsami, pomiaru częstotliwość sygnału. Budowa i działania układu Timer w MSP430f1232 prezentowane były w EP02/2013. Strukturę rejestrów modułu Timer ilustruje rysunek 1.
Licznik i rejestry w trybie porównywania
Rejestry TACCRx wyposażono w moduł wyjścia Output Unit. Wewnątrz modułu jest wytwarzany sygnał OUTx, który można wyprowadzić na linię wejścia-wyjścia mikrokontrolera, albo przekierować do modułu przetwornika analogowo-cyfrowego (wyzwalanie sekwencji pomiarowej). Kierunek sygnału OUTx konfiguruje bit CCISx.
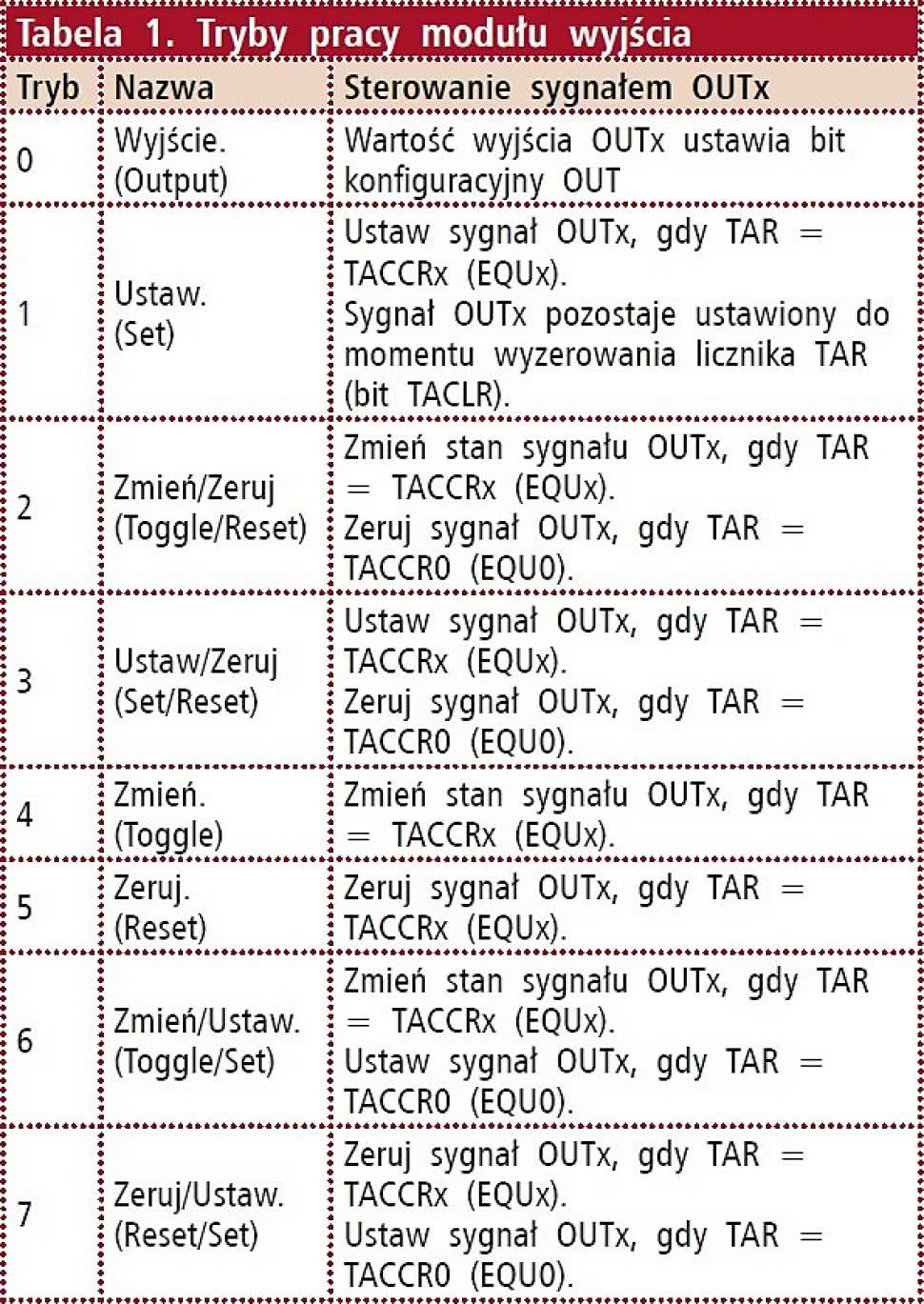
Moduł wyjścia może pracować w jednym z 8 trybów pracy konfigurowanych za pomocą bitu OUTMODx. Tryb pracy modułu określa sposób sterowania sygnałem OUTx. W trybie pracy 0 stan sygnału OUTx jest ustawiany za pomocą bitu konfiguracyjnego OUT. W pozostałych trybach pracy, sterowanie sygnałem OUTx jest uzależnione od zmian wewnętrznych sygnałów EQUx (sygnały ustawiane wraz z flagą CCIFG, gdy wartość licznika TAR jest równa wartości wpisanej do rejestru TACCRx).
Tryby pracy 1 oraz 5 stosowane są do wytwarzania pojedynczych zdarzeń czasowych. Sygnał OUTx może być ustawiony, albo wyzerowany. Tryb 4 może być użyty do generowania sygnału OUTx o częstotliwości o połowę mniejszej niż częstotliwości sygnału taktującego licznik TAR. Tryby pracy 2, 3, 6 oraz 7 wykorzystane są do generowania sygnałów OUTx o ustalonej częstotliwości i regulowanym wypełnieniu (impulsy PWM). Działanie trybów pracy modułu wyjścia prezentuje tabela 1. Przebiegi czasowe sygnałów OUTx w zależności od trybu pracy modułu wyjścia i trybu pracy licznika TAR ilustruje rysunek 2.
W trybach pracy PWM (2,3,6,7) do sterowania sygnałem OUTx używany jest sygnał EQU0 (TACCR0), oraz jeden z sygnałów EQU1, EQU2 (TACCR1, TACCR2). Tryby pracy PWM (2,3,6,7) mogą być używane wyłącznie z rejestrami TACCR1, TACCR2. Pozostałe tryby pracy można stosować dla wszystkich rejestrów TACCRx. Wartość wpisana do rejestru TACCR0 definiuje częstotliwość generowanego sygnału PWM. Wartość wpisana do rejestru TACCR1, TACCR2 określa wypełnienie sygnału PWM.
Licznik i rejestry w trybie przechwytywania
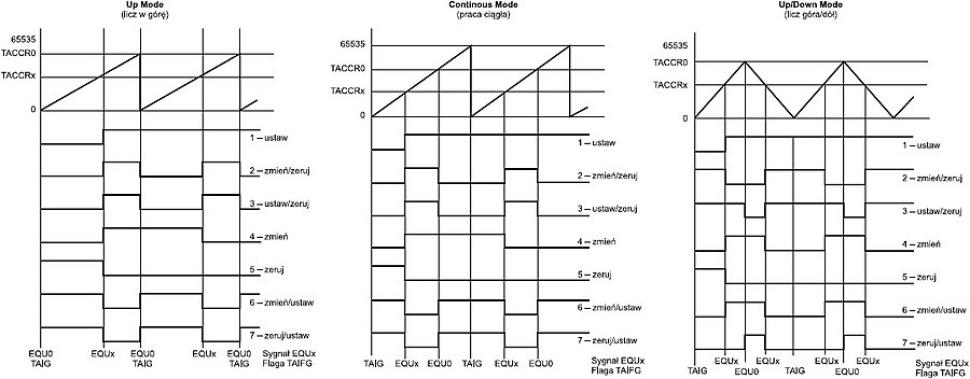
Rysunek 2. Charakterystyka sygnału OUTx. (moduł wyjścia w trybach pracy 1-7, licznik TAR w trybach pracy 1-3)
W trybie przechwytywania, Capture, w momencie wystąpienia sygnału wyzwalającego, wartość licznika TAR jest zapisywana do rejestru TACCRx. Innymi słowy, wartość licznika TAR jest przechwytywana przez rejestr TACCRx (zatrzaskiwana w rejestrze). Dodatkowo, w momencie wystąpienia zdarzenia w rejestrze konfiguracyjnym TACTLx jest ustawiana flaga przerwania CCIFG.
Sygnałem wyzwalającym może być wewnętrzny sygnał zegarowy ACLK lub sygnał zewnętrzny doprowadzony do wejścia mikrokontrolera. Źródło sygnału wyzwalającego konfiguruje bit CCISx. Zbocze sygnału wyzwalającego, po wystąpieniu którego następuje przechwycenie wartości TAR i zapisanie w rejestrze TACCRx, konfiguruje bit CMx. Możliwe nastawy to: zbocze narastające, opadające oraz narastające i opadające.
Może zajść sytuacja, w której w momencie przepisywania wartości licznika TAR do rejestru TACCRx wartość licznika TAR zostanie zwiększona. Wówczas wartość zapamiętana w rejestrze TACCRx będzie nieprawidłowa. Żeby ustrzec się od błędów tego typu, należy włączyć synchronizację operacji przechwytywania z następnym zboczem sygnału taktującego licznik TAR. Opcję tę konfiguruje bit SCS.
W praktyce, korzystając z trybu przechwytywania, możemy wykonać pomiar czasu trwania impulsu, czasu pomiędzy impulsami, a po zastosowaniu przekształceń matematycznych - częstotliwości sygnału. Możemy zmierzyć parametry sygnału taktującego licznik TAR lub sygnału wyzwalającego. Warunkiem koniecznym do wykonania pomiarów jest znajomość parametrów jednego z sygnałów (taktującego licznik TAR lub wyzwalającego). Wówczas na podstawie wartości zatrzaśniętej w rejestrze TACCRx i parametrów jednego z sygnałów możemy obliczyć parametry drugiego.
Przykłady
W przykładzie "Pomiar czasu trwania impulsu" zmierzymy czasu wciśnięcia przycisku SW1. Wykorzystamy licznik TAR pracujący w trybie pracy ciągłej, oraz rejestr TACCR0 w trybie przechwytywania. Licznik TAR będziemy taktować sygnałem ACLK. Sygnał wyzwalający przechwytywanie doprowadzimy do linii P1.1, do której w module "Komputerek" jest dołączony przycisk SW1. Wciśnięcie przycisku spowoduje zwarcie do masy i wyzerowanie linii. W sposób graficzny pracę licznika TAR, oraz przebieg sygnału wyzwalającego ilustruje rysunek 3.
Generator przebiegu prostokątnego
Pliki źródłowe programu zostały zamieszczone na płycie CD i serwerze FTP. W programie głównym zatrzymywana jest praca układu Watchdog, konfigurowane są linie I/O mikrokontrolera oraz jest 4-krotnie zmniejszana częstotliwość sygnału zegarowego ACLK taktującego licznik TAR (BCSCTL1 |= DIVA_2;). Ponieważ sygnał ACLK jest podawany ze źródła LFXT1 (kwarc zegarkowy o częstotliwości 32768 Hz), to po przeskalowaniu częstotliwość sygnału ACLK wynosi 8192 Hz.
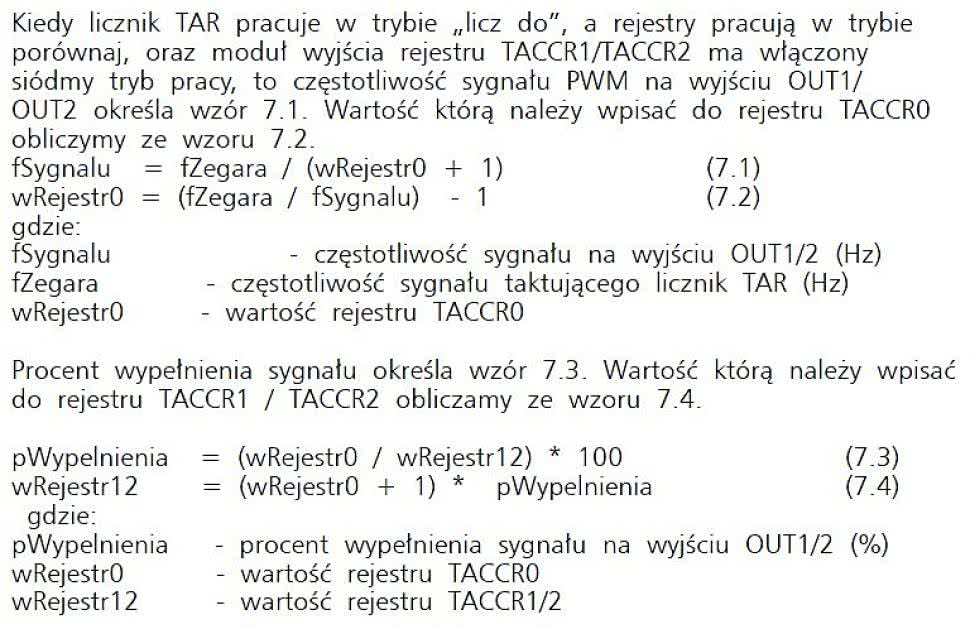
Linie P1.2 i P1.3, na które wyprowadzone będą sygnały OUT1 OUT2 ustawiane są w tryb pracy funkcyjny (P1SEL |= (BIT3 + BIT2);). Następnie jest konfigurowana praca rejestrów TACCRx. Rejestr TACCR0 jest ustawiany w tryb pracy z porównaniem (wyzerowanie bitów konfiguracyjnych). Aby ustalić częstotliwość sygnałów OUT1, OUT2 na 100 Hz do rejestru TACCR0 wpisywana jest wartość 81 (patrz wzór 7.2).
TACCTL0 = 0;
TACCR0 = 81;

Rysunek 3. Pomiar czasu trwania impulsu – przebiegi sygnałów. Druga przechwycona wartość TAR (zwolnienie przycisku) jest a) większa b) mniejsza od pierwszej przechwyconej wartości TAR (wciśnięcie przycisku)
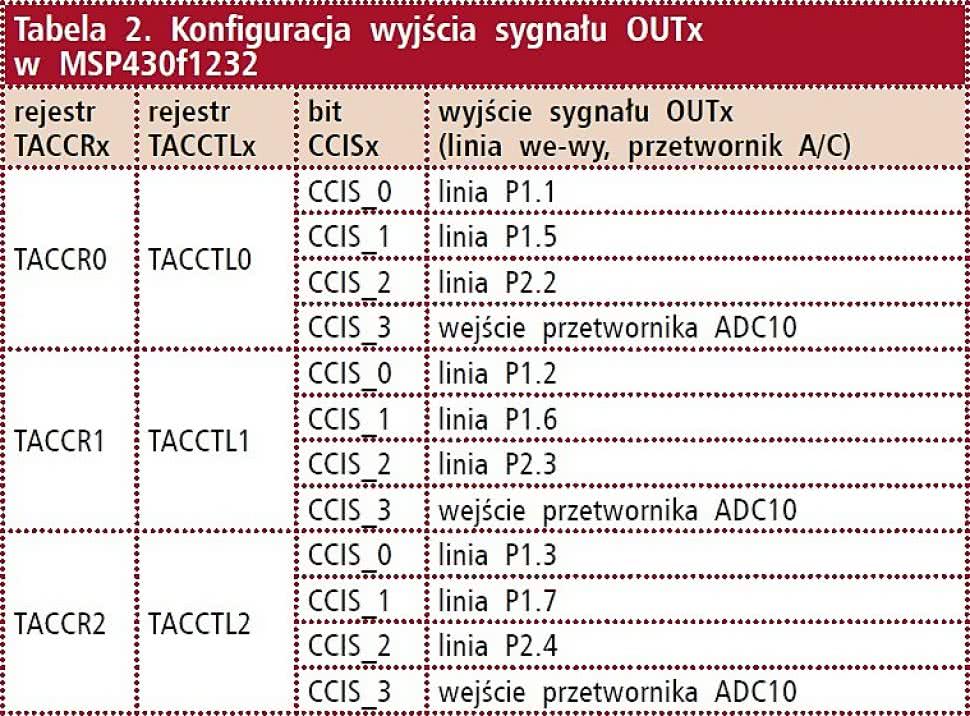
Rejestry TACCR1 jest przełączany do trybu pracy z porównaniem. Układ wyjścia rejestru jest konfigurowany w 7 tryb pracy (tryb PWM - zeruj/ustaw). Sygnał OUT1 jest wyprowadzany na linie P1.2 (tabela 2). Aby ustalić poziom wypełnienia sygnału OUT1 na 25%, do rejestru TACCR1 jest wpisywana wartości 21 (patrz wzór 7.4).
TACCTL1 = CCIS_0 + OUTMOD_7;
TACCR1 = 21;
Rejestr TACCR2 jest konfigurowany w analogiczny sposób, jak rejestr TACCR1. Z tą różnicą, że poziom wypełnienia sygnału OUT2 jest ustalany na 50% (wzór 7.4), a sygnał jest wyprowadzany na wyjście P1.3 (tabela 2).
TACCTL1 = CCIS_0 + OUTMOD_7;
TACCR1 = 42;
Na zakończenie są konfigurowane parametry pracy licznika TAR. Licznik jest przełączany do pracy w trybie "licz do" (bit MC_1). Włączane jest taktowanie licznika sygnałem zegarowym ACLK (bit TASSEL_1). Wartość licznika jest zerowana (bit TACLR). Mikrokontroler jest wprowadzany w tryb uśpienia LPM3 (w uśpieniu sygnał zegarowy ACLK taktujący licznik TAR jest aktywny). Na wyjściach P1.2 i P1.3 mikrokontrolera generowane są sygnały o częstotliwości 100 Hz i wypełnieniu 25% oraz 50%.
Pomiar czasu trwania impulsu

Pliki źródłowe programu zostały zamieszczone na płycie CD i serwerze FTP. W pierwszych liniach programu dołączane są pliki nagłówkowe, deklarowane są procedury oraz zmienne globalne. W programie głównym zatrzymywana jest praca układu Watchdog, konfigurowane są linie I/O mikrokontrolera, wyświetlacz LCD, parametry pracy licznika TAR, rejestru TACCR0 oraz jest włączana obsługa przerwań maskowalnych. Linia P1.1, na którą jest podawany sygnał wyzwalający (przycisk SW1) jest konfigurowana jako wejście pracujące w trybie funkcyjnym.
P1DIR &= ~BIT1;
P1SEL |= BIT1;
Rejestr TACCR0 jest przełączany do pracy w trybie przechwytywania (bit CAP). Sygnał wyzwalający można podać na linie P1.1 albo P1.2 (tabela 3). W przykładzie ustawiana jest linia P1.1 (bit CCIS_0). Przechwytywanie aktywują oba zbocza (narastające i opadające) sygnału wyzwalającego (bit CM_3). Operacja przechwytywania jest zsynchronizowana z sygnałem taktującym licznik TAR (bit SCS).
TACCTL0 = CM_3 + CCIS_0 + CAP + SCS;
Licznik TAR jest taktowany sygnałem zegarowym ACLK (bit TASSEL_1). Licznik pracuje w trybie pracy ciągłej (bit MC_2). Przed rozpoczęciem pracy licznika zerowana jest jego wartość (bit TACLR), oraz włączana jest obsługa przerwań od przepełnienia licznika (bit TAIE).
TACTL = TASSEL_1 + MC_2 + TACLR + TAIE;
W pętli głównej programu jest zerowana flaga przerwania dla rejestru TACCR0 oraz włączana obsługa przerwań.
TACCTL0 &= ~CCIFG;
TACCTL0 |= CCIE;
Następnie mikrokontroler jest wprowadzany w tryb obniżonego poboru energii LPM3, w którym jest aktywny sygnał ACLK taktujący licznik TAR. Wciśnięcie przycisku SW1 powoduje zmianę poziomu sygnału na linii P1.1. Opadające zbocze sygnału wyzwalającego uruchamia procedurę przechwytywania. Wartość licznika TAR jest zapisywana do rejestru TACCR0 oraz jest ustawiana flaga przerwania CCIFG.
Ponieważ włączyliśmy obsługę przerwań dla rejestru TACCR0, to jest uruchamiana procedura obsługi przerwania. W procedurze wartość rejestru TACCR0 jest zapamiętywana w zmiennej pomocniczej, jest zerowany licznik przepełnień licznika TAR (przepełnienia licznika są cały czas liczone), a mikrokontroler wraca do trybu uśpienia. Zwolnienie przycisku SW1 powoduje zmianę stanu na linii P1.1.
Narastające zbocze sygnału wyzwalającego uruchamia procedurę przechwytywania. Wartość licznika TAR jest zapisywana do rejestru TACCR0, oraz jest ustawiana flaga przerwania CCIFG. Ponownie jest uruchamiana procedura obsługi przerwania. W procedurze wartość rejestru TACCR0 jest zapamiętywana w zmiennej pomocniczej, a mikrokontroler budzony z uśpienia. Po wyjściu z uśpienia w pętli głównej programu jest wyłączana obsługa przerwań dla rejestru TACCR0.
TACCTL0 &=~ CCIE;
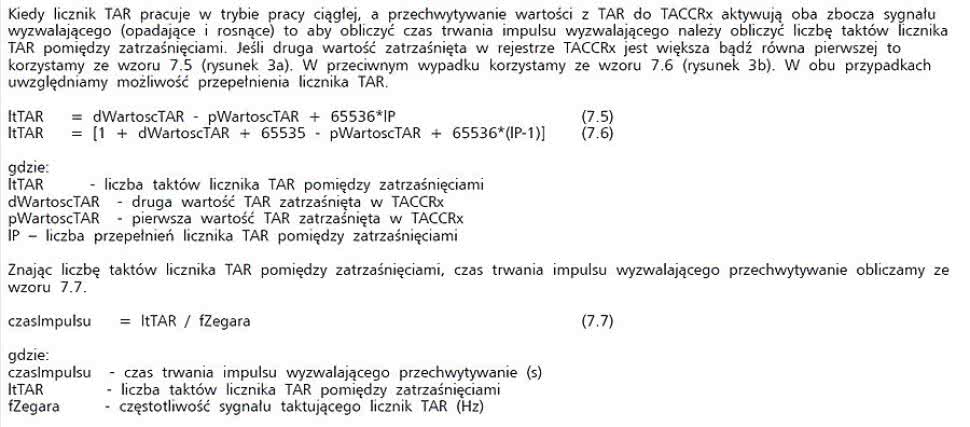
Następnie, na podstawie zapamiętanych wartości rejestru TACCR0 i liczby przepełnień licznika TAR (patrz wzór 7.7), jest obliczany czas trwania impulsu (czas wciśnięcia przycisku SW1), a wynik pomiaru wyświetlany jest na ekranie LCD. W pętli głównej programu jest ponownie czyszczona flaga przerwania dla rejestru TACCR0, włączana obsługa przerwań, a mikrokontroler jest usypiany. Moduł "Komputerek" jest gotowy do kolejnego pomiaru.
Łukasz Krysiewicz, EP