 Zaloguj
Zaloguj



Moduł Timer w MSP430 tworzą licznik oraz grupa rejestrów wspomagających pracę licznika (od 2 do 7 rejestrów). Dostępne są dwa rodzaje układów Timer: moduły typu A, oraz B. Zainstalowany w module "Komputerek" mikrokontroler MSP430f1232 ma jeden moduł Timer typu A. Zaawansowane układy z rodziny MSP430 mogą mieć nawet kilka bloków funkcjonalnych Timer. Przykładowo MSP430FR5739 z serii FRAM ma 5 modułów Timer (2 typu A, 3 typu B).
Moduł Timer_A
Wbudowany w MSP430f1232 moduł Timer_A to 16-bitowy, asynchroniczny licznik TAR, który współpracuje z trzema rejestrami TACCR0, TACCR1, TACCR2. Licznik TAR jest konfigurowany za pomocą rejestru TACTL. Pracę rejestrów TACCR0, TACCR1, TACCR2 ustalają rejestry TACCTL0, TACCTL1, TACCTL2.
Licznik TAR
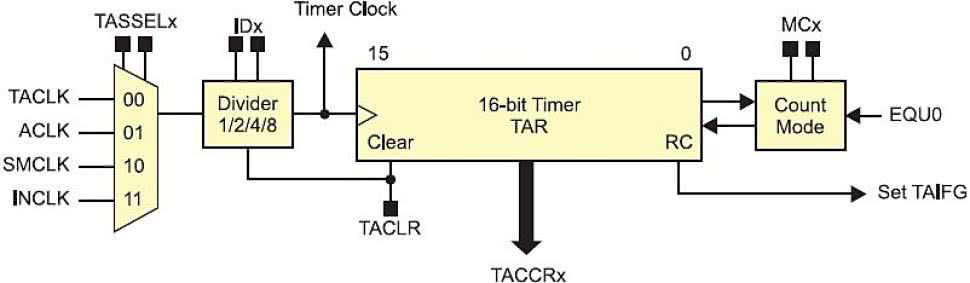
Rysunek 1 Schemat blokowy licznika TAR
Schemat blokowy licznika TAR pokazano na rysunku 1. Licznik może być taktowany jednym z sygnałów ACLK, SMCLK (wewnętrzne sygnały zegarowe) INCLK, TACLK (sygnały zewnętrzne podawane na nóżkę mikrokontrolera). Źródło taktowania licznika konfiguruje bit TASSELx. Częstotliwość sygnału taktującego licznik można podzielić przez 1, 2, 4 lub 8. Preskaler częstotliwości ustawia bit IDx.
Wartość licznika TAR zmienia się z każdym narastającym zboczem sygnału taktującego licznik. W zależności od trybu pracy licznika, jest zwiększana, albo zmniejszana. Ponieważ licznik jest układem 16-bitowym, to minimalna wartość licznika wynosi 0, a maksymalna 65535. Zatem licznik może zliczyć 65536 impulsów, a po osiągnięciu wartości maksymalnej, kolejną wartością licznika jest 0. Zawsze, gdy wartość licznika zmienia się z wartości maksymalnej na 0, to w rejestrze konfiguracyjnym TACTL jest ustawiana flaga przerwania TAIFG (od przepełnienia licznika TAR). Flaga jest obsługiwana w przerwaniu modułu Timer_A (wektor TAIV). Źródło przerwania konfiguruje bit TAIE.
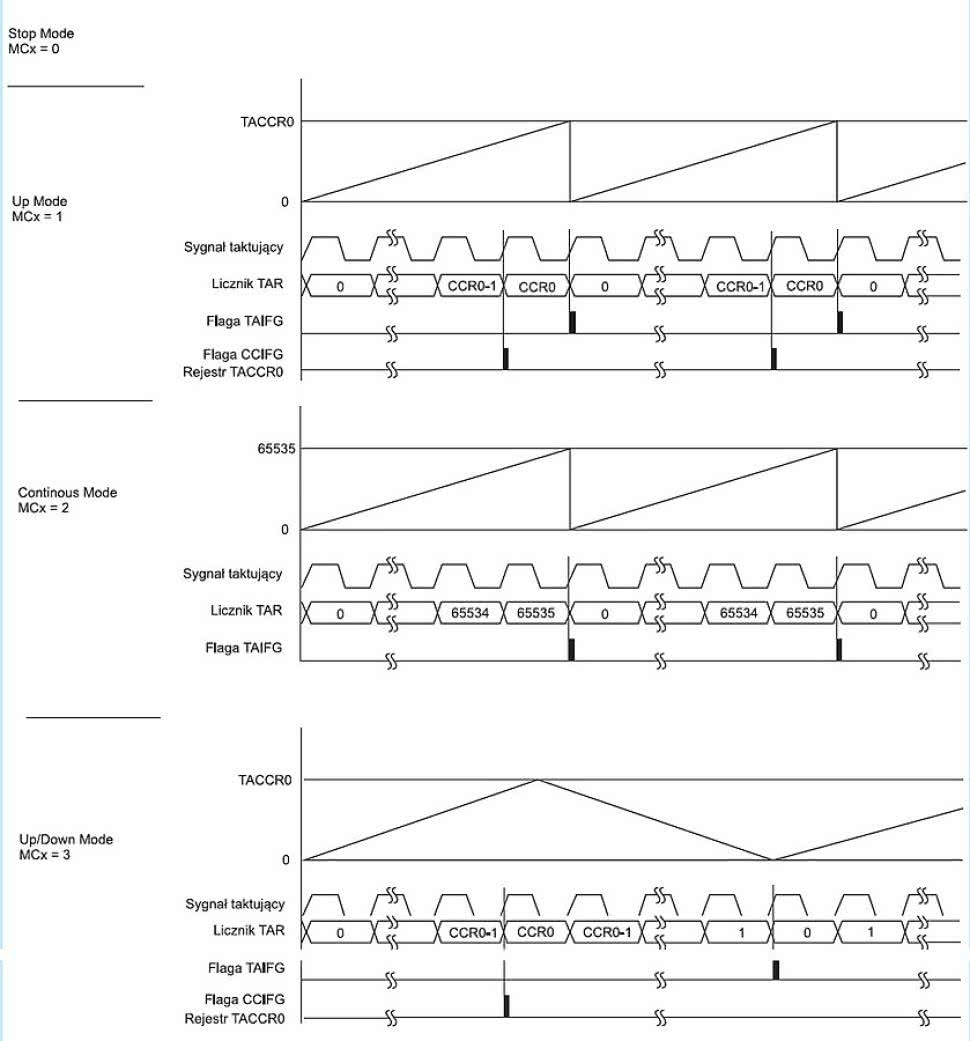
Rysunek 2. Licznik TAR. Tryby pracy. Flagi przerwań
Wyzerować licznik możemy wpisując do jego rejestrów wartość 0. Ten sam efekt uzyskamy ustawiając bit konfiguracyjny TACLR. Jednak korzystając "metody bitowej" należy pamiętać, że jego ustawienie nie tylko zeruje licznik TAR, ale także jest zerowany bit IDx (preskaler częstotliwości sygnału taktującego licznik).
Licznik TAR może pracować w jednym z 4 trybów pracy. Tryb pracy licznika konfiguruje bit MCx. Działanie licznika w zależności od trybu pracy pokazano na rysunku 2.
W trybie Stop Mode, licznik jest wyłączony. Tryb ten jest używany do zatrzymania pracy licznika TAR.
W trybie Up Mode (licz w górę), licznik cyklicznie zlicza od 0 do wartości wpisanej do rejestru TACCR0. Odliczane jest TACCR0+1 impulsów. W momencie, gdy wartość licznika TAR zmienia się z wartości TACCR0-1 na TACCR0, to w rejestrze TACCTL0 jest ustawiana fl aga CCIFG. Flaga przepełnienia licznika TAIFG jest ustawiana przy zmianie wartości z TACCR0 na 0.
W trybie Continous Mode (praca ciągła), licznik cyklicznie zlicza od 0 do 65535. W momencie przepełnienia licznika ustawiana jest flaga TAIFG.
W trybie Up/Down Mode (licz góra/dół), licznik zlicza impulsy od 0 do wartości wpisanej do rejestru TACCR0. Następnie zmniejsza swoją wartość od TACCR0 do 0. Jest odliczane 2×TACCR0 impulsów. W momencie, gdy wartość licznika TAR zmienia się z wartości TACCR0-1 na TACCR0, to w rejestrze TACCTL0 jest ustawiana flaga CCIFG. Flaga przepełnienia licznika TAIFG jest ustawiana przy zmianie wartości licznika z 1 na 0.
Rejestry TACCRx
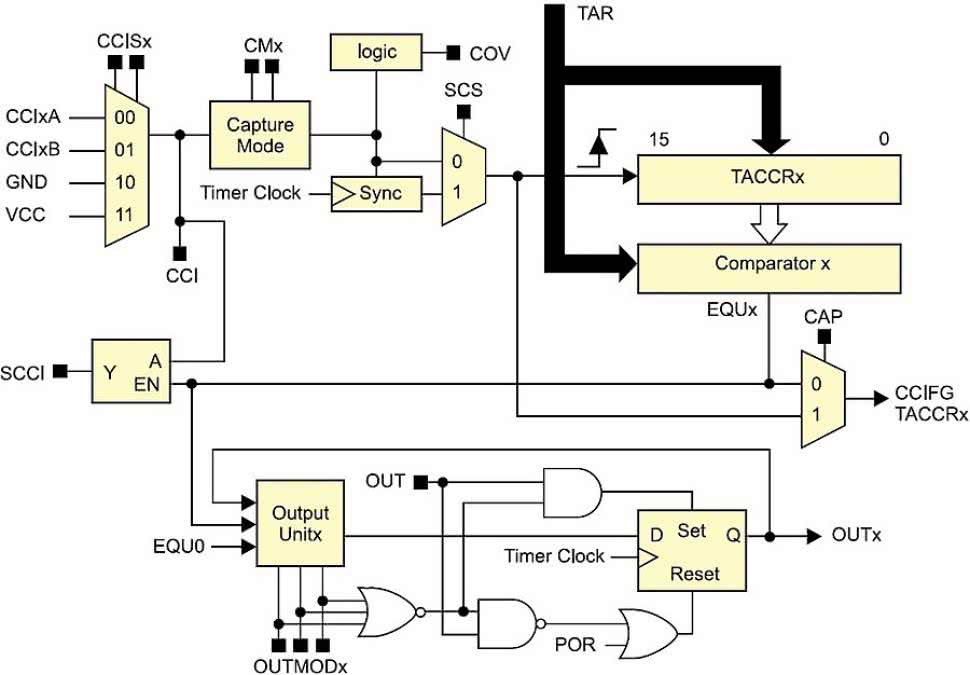
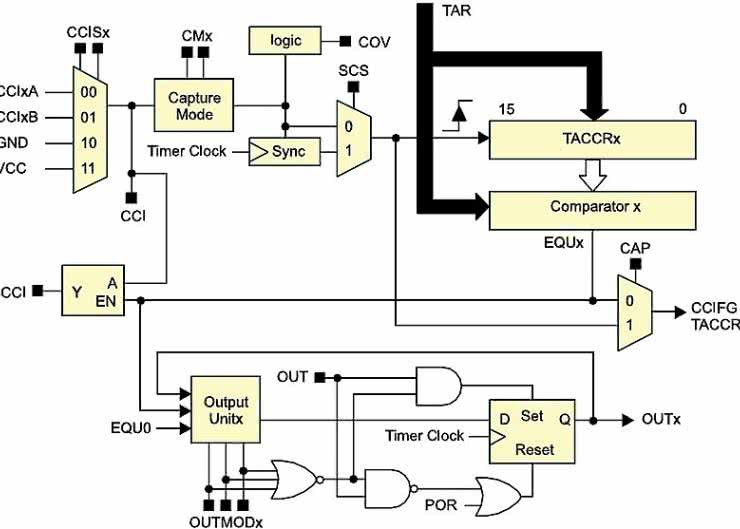
Rysunek 3. Schemat blokowy rejestru TACCRx
Licznik TAR w MSP430f1232 współpracuje z 3 identycznymi rejestrami TACCRx. Schemat blokowy pojedynczego rejestru TACCRx ilustruje rysunek 3.
Rejestry TACCRx mogą pracować albo w trybie porównującym Compare, albo w trybie przechwytującym Capture. Tryb pracy rejestru konfiguruje bit CAP. Tryb porównujący Compare jest używany do generowania zdarzeń czasowych. Umożliwia także generowanie impulsów o regulowanym czasie trwania - modulację PWM. Tryb przechwytywania Capture jest stosowany do pomiaru czasu trwania impulsu oraz pomiaru czasu upływającego pomiędzy impulsami, ewentualnie do pomiaru częstotliwości sygnału.
W trybie porównującym Compare wartość licznika TAR jest porównywana z wartością wpisaną do rejestru TACCRx. W momencie, gdy obie wartości są równe, to automatycznie w rejestrze TACCTLx jest ustawiana flaga przerwania CCIFG oraz wewnętrzny sygnał EQUx. Fakt ustawienia flagi CCIFG można wykorzystać do generowania zdarzeń czasowych. Włączamy przerwania dla rejestru (bit konfiguracyjny CCIE) i w procedurze obsługi przerwania zareagować na odmierzenie zdefiniowanego odcinaka czasu.
Przerwania
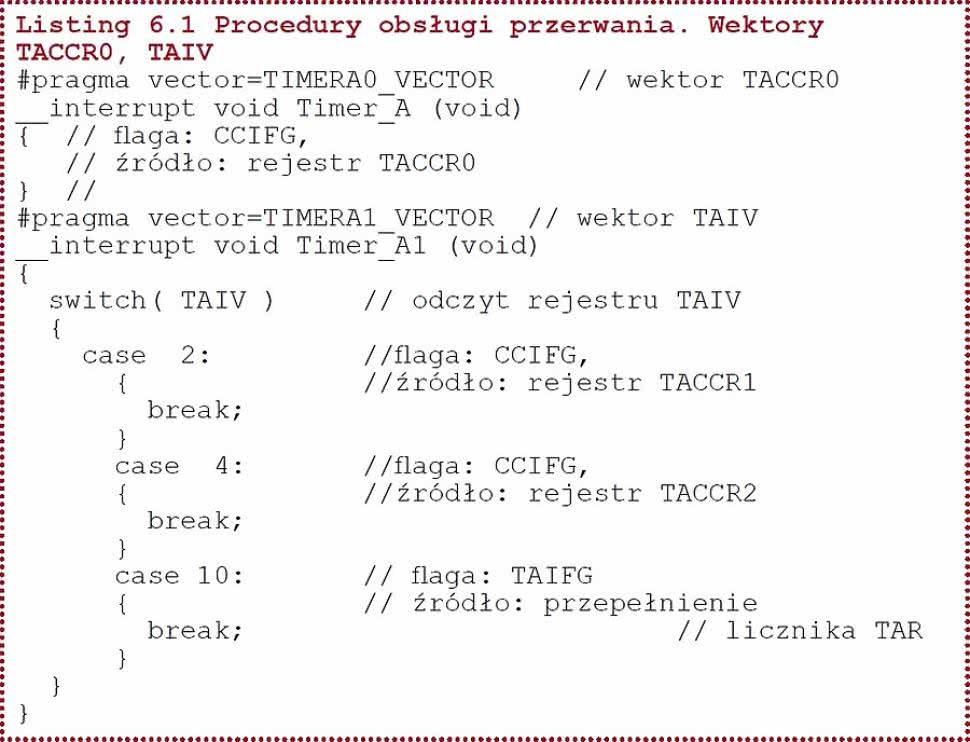
Listing 6.1 Procedury obsługi przerwania. Wektory TACCR0, TAIV
Moduł Timer_A, obsługiwany jest przez dwa wektory przerwań. Są to wektor TACCR0, oraz TAIV. Wektor TACCR0, obsługuje przerwania od rejestru TACCR0. Wektor TAIV obsługuje przerwania od pozostałych rejestrów, oraz przerwanie od przepełnienia licznika TAR. Wyższy priorytet obsługi ma przerwanie od wektora TACCR0.
Szablony procedur obsługi przerwań wektorów TACCR0 oraz TAIV pokazano na listingu 6.1. Do obsługi przerwań od wektora TAIV jest używany rejestr TAIV. Jest w nim przechowywana informacja o ustawieniu flag przerwania, a odczyt rejestru powoduje automatyczne wyzerowanie jednej z nich. W przypadku, gdy w rejestrze jest ustawionych więcej niż jedna flaga, to podczas odczytu rejestru, najpierw zostaje wyzerowana flaga CCIFG rejestru TACCR1, a następnie flaga CCIFG rejestru TACCR2, a na koniec flaga TAIFG od przepełnienia licznika TAR.
Przykłady
Zaprezentujemy dwa przykłady użycia modułu Timer do odmierzania czasu. W przykładzie "Zegarek elektroniczny" będziemy odmierzać jednosekundowe odcinki czasu, a upływający czas (sekundy, minuty, godziny) wyświetlimy na ekranie LCD. Do tego celu użyjemy między innymi licznika TAR pracującego w trybie Up Mode. Wykorzystamy przepełnienie licznika i moment ustawienia flagi przerwania TAIFG (rysunek 2). Czas pracy licznika TAR w trybie Up Mode określa wzór 6.1. Wartość wpisywaną do rejestru TACCR0 obliczymy ze wzoru 6.2.
tPracy = (wRejestr0 + 1) / fZegara (6.1)
wRejestr0 = tPracy × fZegara - 1 (6.2)
gdzie:
- tPracy: czas pracy licznika TAR w trybie Up Mode (s).
- fZegara: częstotliwość sygnału taktującego licznik TAR (Hz).
- wRejestr0: wartość rejestru TACCR0.
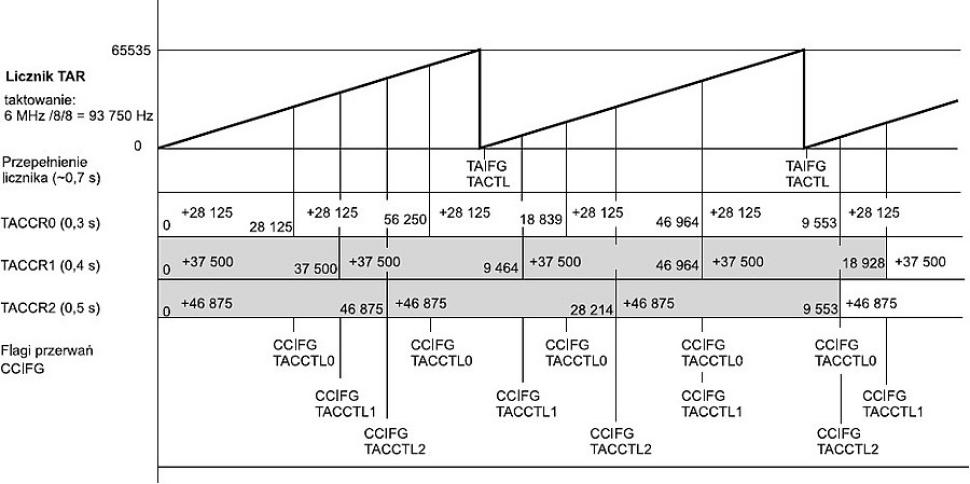
Rysunek 4. Cykliczne odmierzanie trzech odcinków czasu (0,3; 0,4; 0,5 s). Przepełnienie licznika i ustawienie flagi TAIG można użyć do pomiaru czwartego odcinka czasu (około 0,7 s)
W przykładzie "Pozytywka" będziemy odtwarzać utwory muzyczne zapisane w formacie RTTTL (Ring Tone Transfer Language) zaprojektowanym przez firmę Nokia. Do odmierzania czasu użyjemy licznika TAR pracującego w trybie Continuous (praca ciągła) oraz rejestrów TACCR0, TACCR1, TACCR2 obsługiwanych w trybie Compare (porównaj).
Licznik TAR pracujący w trybie Continuous oraz rejestry TACCRx w trybie Compare najczęściej używane są do cyklicznego odmierzania czasu. Wykorzystując wszystkie rejestry TACCRx możemy odmierzyć 3 odcinki czasu, a pomiar polega na cyklicznym dodawaniu (tzw. podbijaniu) wartości rejestru TACCRx (rysunek 4). Czas trwania odmierzanego odcinku czasu definiuje wzór 6.3. Wartość wpisywaną do rejestru TACCRx obliczymy ze wzoru 6.4.
oCzas = wRejestrx / fZegara (6.3)
wRejestrx = oCzas × fZegara (6.4)
gdzie:
- oCzas: odmierzany odcinek czasu [s].
- Zegara: częstotliwość sygnału taktującego licznik TAR [Hz].
- wRejestrx: wartość rejestru TACCRx
Ponieważ rejestry TACCRx są 16-bitowe, to można do nich wpisać liczbę z zakresu 0…65535. Jeśli wartość obliczona ze wzoru 6.4 jest większa niż 65535, to odmierzanie "długiego" odcinka czasu należy podzielić na etapy i kilkakrotnie odmierzać "krótkie" odcinki czasu aż do momentu uzyskania wymaganego opóźnienia (rysunek 5).
Zegarek elektroniczny
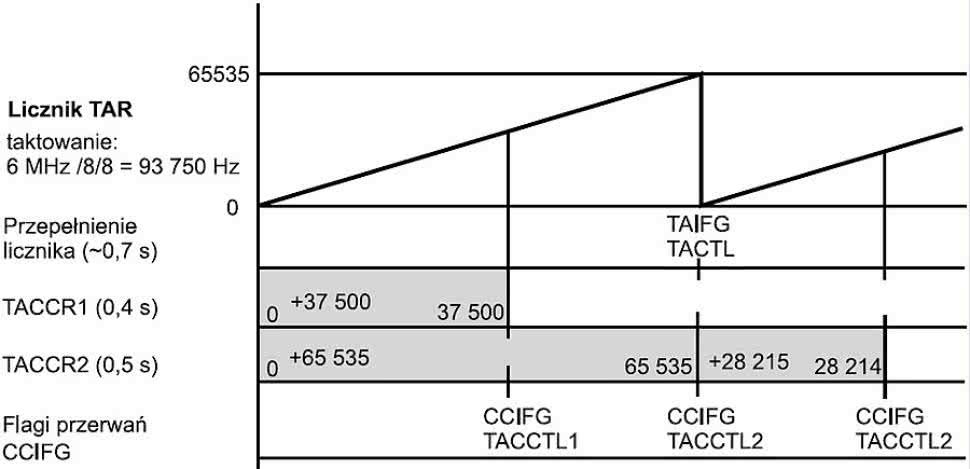
Rysunek 5. Pomiar dwóch odcinków czasu: 0,4 s oraz 1 s. Odmierzając odcinek 1 s, pomiar podzielono na dwa etapy (65535+28215=93750 taktów licznika TAR, czyli 0,7 s+0,3 s=1 s)
Program "Zegarek Elektroniczny" uruchamiamy korzystając z modułu "Komputerek". Zworki JP7 i JP8 dołączające rezonator kwarcowy do źródła zegarowego LFXT1 należy ustawić w pozycji LF. Pozostałe zworki układu należy ustawić w pozycji IO/Off, a w złączu szpilkowym Dis1 zamontować wyświetlacz LCD.
Pliki źródłowe programu zostały zamieszczone na płycie CD oraz na serwerze FTP. Struktura programu jest identyczna, jak programu z ćwiczenia "Sekundnik" (EP01/13). Na jego początku dołączane są pliki nagłówkowe, deklarowane procedury oraz zmienne globalne. W programie głównym jest konfigurowany generator taktujący Basic Clock, moduł Watchdog Timer, porty we/wy, wyświetlacz LCD oraz jest włączana obsługa przerwań maskowalnych. W pętli głównej programu, na ekranie LCD jest wyświetlany czas, a następnie mikrokontroler jest wprowadzany w tryb uśpienia LPM3.
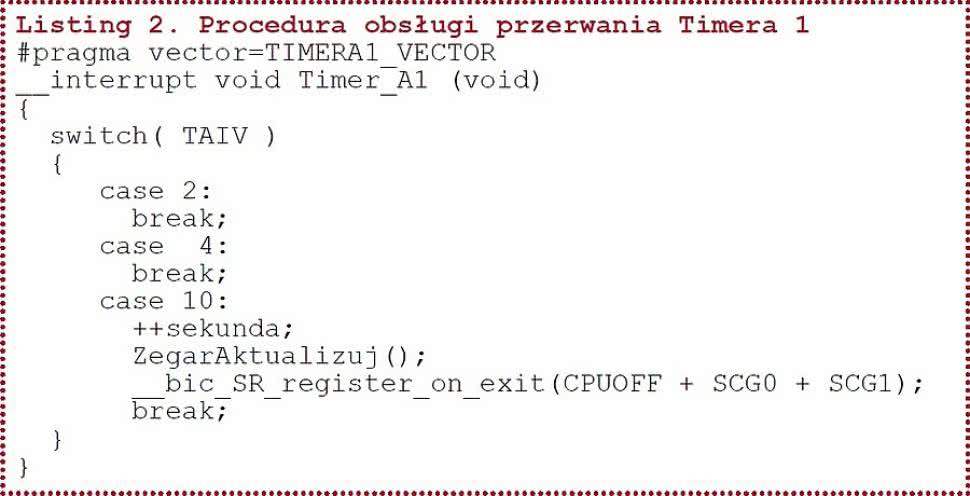
Listing 2. Procedura obsługi przerwania Timera 1
Różnica pomiędzy programem "Sekundnik" a programem "Zegarek elektroniczny" jest taka, że w tym pierwszym czas był odmierzany przy użyciu modułu Watchdog (tryb pracy Timer, zegar), a z trybu uśpienia mikrokontroler budziły przerwania od przepełnienia licznika Watchdog. W drugim programie czas odmierza licznik TAR (tryb pracy Up Mode), a z uśpienia mikrokontroler budzą przerwania od przepełnienia licznika TAR.
W programie licznik TAR jest taktowany sygnałem zegarowym ACLK (bit TASSEL_1), jest włączana obsługa przerwań od przepełnienia licznika (bit TAIE) oraz tymczasowo zatrzymywana praca licznika (bit MC_0). Odpowiada za to następujące podstawienie: TACTL=TASSEL_1+MC_0+TAIE;. W kolejnych instrukcjach licznik jest zerowany oraz jest zapisywany rejestr TACCR0:
TAR = 0;
TACCR0 = 16383;
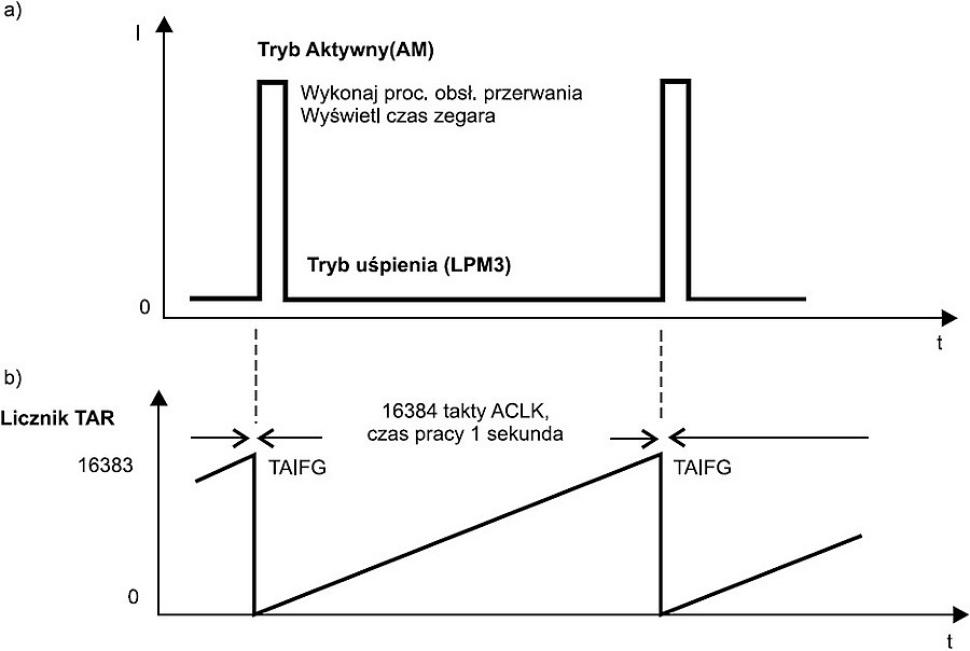
Rysunek 6. „Zegarek elektroniczny” pętla główna programu: a) praca mikrokontrolera w trybie aktywnym / trybie uśpienia, b) praca licznika TAR w trybie Up Mode
Ponieważ licznik ma odmierzać jednosekundowe odcinki czasu, to zgodnie ze wzorem 6.1, do rejestru TACCR0 jest wpisywana wartość 16383 (częstotliwość sygnału ACLK wynosi 16384 Hz). Licznik jest uruchamiany po zakończeniu konfigurowania (włączenie trybu pracy Up Mode) za pomocą polecenia TACTL |= MC_1;.
Licznik zaczyna pracować i z każdym narastającym zboczem sygnału ACLK zwiększana jest jego wartość. W pętli głównej programu wywoływana jest procedura wypisująca na ekranie wyświetlacza aktualny czas zegara, a następnie mikrokontroler wprowadzany jest w tryb uśpienia LPM3. W stanie uśpienia sygnał zegarowy ACLK jest aktywny i taktuje licznik TAR. W momencie, gdy minie czas pracy licznika (sekunda) to licznik przepełni się (zmiana wartości TAR z TACCR0 na 0) i zostanie ustawiona flaga TAIFG. Ponieważ w programie włączona została obsługa przerwań od przepełnienia licznika, to ustawienie flagi TAIFG obudzi mikrokontroler z uśpienia i aktywuje wykonanie procedury obsługi przerwania, którą umieszczono na listingu 2.
W procedurze sprawdzane jest źródło przerwana i jeśli przerwanie wywołało ustawienie flagi od przepełnienia licznika TAR (wartość 10 w wektorze TAIV), to jest inkrementowany licznik sekund (zmienna sekunda), aktualizowany czas zegara oraz zgłaszany rozkaz opuszczenia trybu uśpienia po powrocie z procedury obsługi przerwania. Po wyjściu z procedury obsługi przerwania, ponownie jest wykonywana pętla główna programu. Na ekranie wyświetlacza jest wypisywany aktualny czas zegara, a mikrokontroler jest usypiany. Kolejne przerwanie od przepełnienia licznika TAR budzi mikrokontroler, a cykl pracy programu powtarza się. Pracę pętli głównej programu ilustruje rysunek 6.
Pozytywka
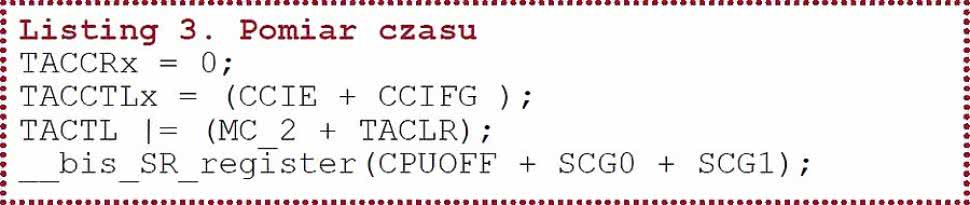
Listing 3. Pomiar czasu
Program "Pozytywka" uruchamiamy korzystając z modułu "Komputerek". Zworki JP7 i JP8 dołączające rezonator kwarcowy do źródła zegarowego LFXT1 należy ustawić w pozycji LF. Zworkę JP6 należy ustawić w pozycji Spk (dołączenie brzęczyka). Pozostałe zworki układu należy ustawić w pozycji IO/Off, a w złączu szpilkowym Dis1 zamontować wyświetlacz LCD.
Moduł "Komputerek" zaprogramowany aplikacją "Pozytywka" odtwarza 8 utworów muzycznych zapisanych w formacie RTTTL. Definicje utworów zamieszczono w pliku Muzyka.h, opis formatu RTTTL w pliku Specyfikacja.txt. Procedury pozwalające "czytać" utwory muzyczne zdefiniowano w pliku RTTTL.c.
W efekcie wykonania funkcji Parsuj, dla każdej nuty utworu jest obliczany okres drgania nuty oraz czas trwania. Dodatkowo, procedura sprawdza poprawność utworu. Jeśli analizowany utwór muzyczny nie zawiera błędów, to na ekranie LCD jest wyświetlany jego tytuł i rozpoczyna się odtwarzanie. W przeciwnym wypadku jest wyświetlany komunikat informujący o błędzie. Przykładowo, pierwsze takty 5 symfonii Bethovena zapisane w formacie RTTTL wyglądają następująco:
const char utwor[]="5SymfoniaB:d=4,o=5,b=6 3:8p,8g5,8g5,8g5,2d#5"
Wywołanie procedury Parsuj należy wykonać w następujący sposób Parsuj(utwor).
Do odmierzania czasu trwania oraz okresu drgania nuty używane są rejestry TACCR0, TACCR1. Czas ciszy pomiędzy utworami (1 sekunda) jest odmierzany przy użyciu rejestru TACCR2. Wszystkie rejestry pracują w trybie Compare, a licznik TAR jest ustawiony w trybie pracy ciągłej Continuous. Nuty w utworze muzycznym grane są w technice "staccato", co oznacza, że pomiędzy dźwiękami jest wprowadzana pauza (chwila ciszy). Technikę odtwarzania nut ilustruje rysunek 7.
W sekcji konfiguracyjnej programu definiowane są parametry pracy licznika TAR. Licznik jest zatrzymywany (bit MC_0) oraz jest dokonywany wybór źródła sygnału taktującego licznik (bit TASSEL_1). Licznik jest taktowany sygnałem ACLK o częstotliwości 32768 Hz. Za tę funkcjonalność odpowiada następująca linijka programu: TACTL = TASSEL_1 + MC_0;.
W programie głównym odmierzane są:
- czas trwania nuty (czas drgania nuty + pauza),
- okres drgania nuty,
- pauza pomiędzy utworami.
Rysunek 7. Odtwarzanie nut w technice staccato. Czas drgania nuty to 80% czasu trwania nuty. Czas ciszy nuty to 20% czasu trwania nuty
Do pomiaru czasu trwania nuty (drgania i pauzy) jest używany rejestr TACCR0 oraz procedura obsługi przerwania Timer_A0 (wektor TACCR0). Obliczona ze wzoru 6.4 wartość jest wpisywana do zmiennej czas0. Ponieważ z obliczeń można uzyskać wartość większą niż 65535 (nuty mogą być grane dłużej niż 2 sekundy), to w procedurze obsługi przerwania odmierzanie czasu zostało podzielone na etapy, którą to technikę opisano we wstępie jako metodę pomiaru "długiego" odcinka czasu. Do pomiaru okresu drgań nuty jest używany rejestr TACCR1 oraz procedura obsługi przerwania Timer_A1 (wektor TAIV bit 2). Czas jest odmierzany w trybie pomiarów cyklicznych, a w procedurze obsługi przerwania stan linii sterującej brzęczykiem piezoelektrycznym jest zmieniany na przeciwny (pobudzony do drgań brzęczyk generuje dźwięk). Przed pomiarem jest odczytywany obliczony w procedurze Parsuj okres drgania nuty i jest ustawiana wartość zmiennej czas1. Pomiar rozpoczyna się, gdy odczytana wartość jest większa od 0 (wartość równa 0 oznacza, że aktualna "nuta" to pauza i nie trzeba pobudzać brzęczyka). Brzęczyk jest pobudzany przez czas drgania nuty (80% czasu trwania nuty), a następnie jest wyłączany (20% czasu trwania nuty). Do pomiaru czasu trwania pauzy pomiędzy utworami jest używany rejestr TACCR2 oraz procedura obsługi przerwania Timer_A1 (wektor TAIV bit 4). Melodie rozdziela sekunda ciszy. Zgodnie ze wzorem 6.4 wartość, którą należy wpisać do rejestru TACCR2 wynosi 32768. W odróżnieniu od przypadku z odmierzaniem czasu trwania nuty pomiaru nie trzeba dzielić na etapy (pomiar "krótkiego" odcinka czasu).
Pomiar czasu (krótki, długi, cykliczny) zawsze inicjowany jest w następujący sposób:
- Inicjowanie zmiennej czasx,
- Zerowanie rejestru TACCRx,
- Włączenie obsługi przerwań dla rejestru TACCRx (bit CCIE ) oraz ustawienie flagi wystąpienia przerwania dla rejestru TACCRx (bit CCIFG),
- Zerowanie licznika TAR (bit TACLR) i włączenie trybu pracy ciągłej licznika (bit MC_2),
- Wprowadzenie mikrokontrolera w tryb uśpienia LPM3.
Cały proces sprowadza się do kilku linijek programu, które zamieszczono na listingu 3.
Ustawienie flagi wystąpienia przerwania i włączenie obsługi przerwania dla rejestru TACCRx (punkt 3) powoduje, że mikrokontroler automatycznie rozpoczyna wykonanie procedury obsługi przerwania (Timer_A0, albo Timer_A1 bit 2 lub 4). W procedurze wartość ze zmiennej czasx wpisywana jest do rejestru TACCRx. Rozpoczyna się pomiar czasu (krótki, długi, cykliczny), a mikrokontroler wprowadzany jest w tryb uśpienia LPM3. Po zakończeniu pomiaru mikrokontroler budzony jest z uśpienia LPM3. Zatrzymywana jest praca licznika TAR (bit MC_2) oraz jest wyłączana obsługa przerwań dla rejestru TACCRx (bit CCIE):
TACTL &= ~MC_2;
TACCTLx &= ~CCIE;
Łukasz Krysiewicz, EP
Dodatkowe materiały znajdziesz na FTP
user: 32858, pass: 4285avne












