 Zaloguj
Zaloguj




Po co nam procesor w układzie FPGA? Od odpowiedzi na to pytanie warto zacząć nasze rozważania, gdyż zanim zaczniemy stosować rzadziej lub częściej mikroprocesor implementowany w układzie FPGA, musimy dowiedzieć się kiedy i dlaczego to robić.
Posłużmy się teraz dwoma prostymi przykładami. W pierwszym z nich zadaniem niech będzie wyświetlenie na monitorze VGA jednobarwnego obrazka z rozdzielczości 1024×768 pikseli. Stosując do tego celu układ FPGA zaprojektujemy układ logiczny, taktowany z częstotliwością równą częstotliwości wyświetlania kolejnych pikseli (65 MHz), który dane z pamięci będzie wystawiał na linie sterujące wyświetlaczem oraz będzie zliczał piksele oraz linie i generował odpowiednie sygnały synchronizacji. Może to wyglądać skomplikowanie, ale w rzeczywistości to przysłowiowa „bułka z masłem”. Pamiętajmy, że układ FPGA może wykonywać przy dobrym projekcie wiele czynności na raz i w jednym takcie zegara odczytać dane pamięci, zwiększyć licznik pikseli, porównać go w celu ustalenia momentów synchronizacji… Teraz kolej, aby do tego zadania zaprzęgnąć procesor. Z grubsza policzmy, że na każdy piksel musimy: odczytać dane o pikselu z pamięci RAM, wysterować port wyjścia, zwiększyć licznik pikseli, porównać go i tak dalej. Już chyba dostrzegacie, w czym problem? Na jeden piksel procesor musi wykonać na pewno więcej niż 4 takty. Zatem musimy go taktować minimum zegarem 4×65 MHz=260 MHz. No i nie zapominajmy – procesor wtedy nie może robić nic poza wyświetlaniem tego obrazu. Wybór zatem jest tu jasny – układ FPGA zwycięża!
Zadanie drugie – obsługa skomplikowanego, wielopoziomowego menu użytkownika. FPGA? Jest mi trudno wyobrazić sobie nakład pracy na wykonanie projektu odpowiedniej struktury realizującej taką funkcję. Oczywiście, jest to możliwe, ale w procesorze można takie menu zrealizować w mig. Potrzeba do tego kilku struktur opisujących dane, parę instrukcji warunkowych, tablic i tyle. Viola! Procesor w tym zadaniu zwycięża!
Mam nadzieję, że te przykłady pozwalają na dojście do wniosku, że do niektórych zadań lepszy będzie procesor, a do innych układ FPGA. Jeszcze inne zadania mogą być realizowane równie dobrze w procesorze jak i w układzie FPGA, jak na przykład eliminacja drgań styków.
W praktyce koncepcja łączenia procesora i logiki w układzie FPGA jest często wykorzystywana. Czasami nawet procesor nie jest syntezowany w układzie FPGA (jak my będziemy to robili za moment), ale jest fizycznie umieszczany w strukturze układu scalonego (układy SoC, np. Cyclone V).
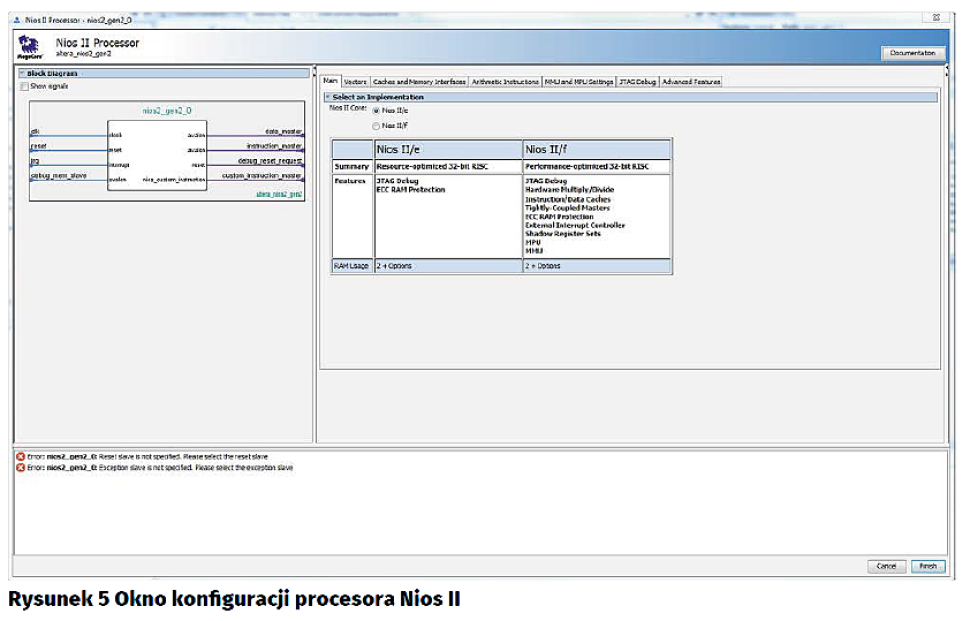
NIOS II to tak naprawdę przede wszystkim rdzeń procesora, którzy występuje w 2 podstawowych wariantach:
- NIOS II /e – Economy – podstawowy rdzeń z rodziny NIOS, zajmuje mało zasobów sprzętowych układu FPGA, jest dostępny za darmo bez ograniczeń.
- NIOS II /f – Fast – bardziej rozbudowany i szybszy rdzeń, zajmuje więcej zasobów sprzętowych, w wersji darmowej działa tylko przy podłączonym debuggerze lub przez godzinę po jego odłączeniu.
W wypadku naszego zestawu maXimator idealnym rozwiązaniem jest rdzeń Economy, który zajmie niewiele zasobów naszego układu, pozostawiając jeszcze sporo miejsca na implementowane przez nas funkcje.
Czy jednak sam rdzeń NIOS II zadziała? Nie! Musimy jeszcze (jak inżynierowie projektujący „normalny” procesor) dołączyć do niego pamięci (operacyjną i instrukcji), porty wejścia/wyjścia i inne potrzebne elementy. Na szczęście, do tego celu przygotowano środowisko Qsys, którego obsługi wkrótce się nauczymy.
Nasz pierwszy projekt – minimalny, działający system
Zakładam, że każdy umie stworzyć pusty projekt w środowisku Quartus. Ja na potrzeby artykułu wykonałem projekt o nazwie Tutorial01.
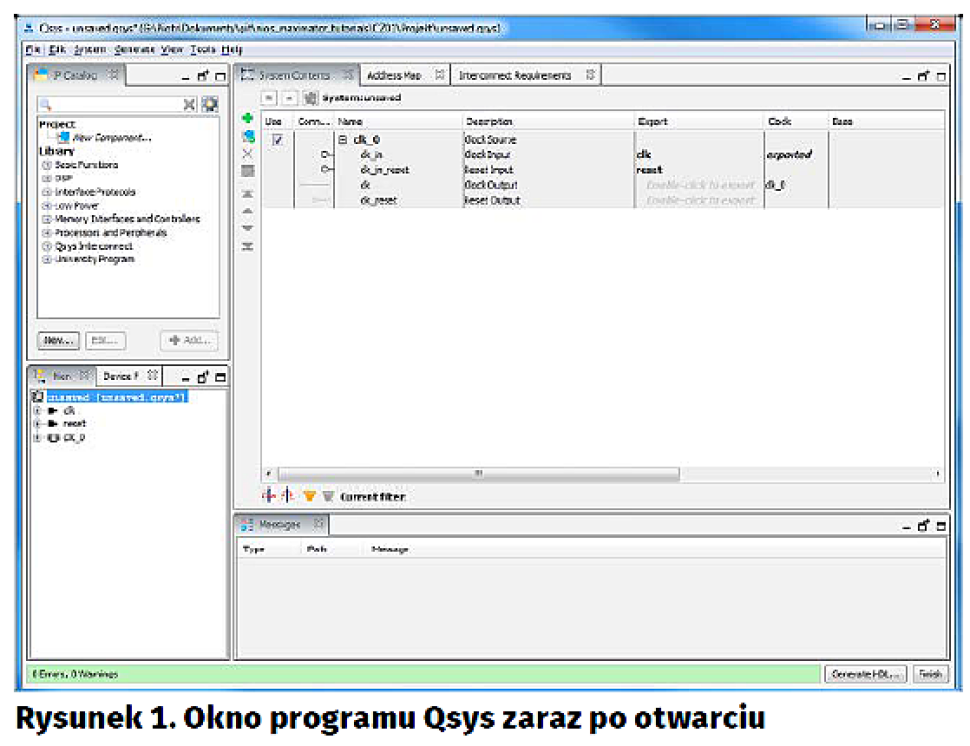
Pierwsze kroki (kliknięcia) w Qsys. Klikamy na Tools Qsys. Zostanie wyświetlone (po chwili niezbędnej na załadowanie wszystkich komponentów) pokazane na rysunku 1 okno naszego narzędzia. Po lewej stronie, u góry, znajduje się katalog gotowych komponentów IP Catalog (z którego zaraz skorzystamy). Poniżej mamy dostęp do widoku hierarchii systemy (Hierarchy) oraz w drugiej karcie okienko ewentualnej zmiany układu, z jakim pracujemy. W dolnej części okna, w zakładce Messages będą pojawiały się w czasie tworzenia naszego systemu mikroprocesorowego komunikaty o błędach i inne informacje – zawsze warto się z nimi zapoznać. W głównej części okna, w zakładce System Contents wyświetlany jest projekt naszego systemu. Zakładka Address Map będzie zawierała informacje i ustawienia związane z przestrzenią adresową, czyli pod jakimi adresami będzie widoczna dla naszego rdzenia np. pamięć RAM, a pod jakimi rejestry do sterowania portami IO. W ostatniej karcie Interconnect Requirements znajdują się dodatkowe ustawienia połączeń, których nie musimy zmieniać.
- Use – pozwala na włączenie lub wyłączenie danego komponentu z systemu. Może być to przydatne np. gdy chcemy usunąć jakiś jego moduł, ale tylko tymczasowo, aby później nie musieć od nowa go konfigurować – wtedy wystarczy tylko odznaczyć to pole przy jego nazwie.
- Connections – tu będziemy wykonywać połączenia pomiędzy komponentami.
- Name – zawiera nazwę modułu, którą możemy zmieniać po 2-krotnym kliknięciu lub danego portu tego modułu. Warto nazywać moduły tak, abyśmy mogli szybko zorientować się, do czego służą. Szczególnie, jeśli umieszczamy w systemie kilka modułów tego samego typu.
- Description – jak sama nazwa wskazuje to opis danego wiersza naszej tabelki.
- Export – w tej kolumnie widzimy nazwy portów jeśli są one „wyeksportowane”, czyli po prostu widoczne na zewnątrz systemu mikroprocesorowego. Możemy porównać to do tego, jakie piny ma budowany przez nas procesor. Na przykład, będziemy chcieli mieć dostęp do wejścia sygnału zegarowego, ale niekoniecznie potrzebny nam będzie dostęp do magistrali danych naszego układu. Jeśli chcemy jakiś port uwidocznić należy dwukrotnie kliknąć w odpowiednim miejscu. Możemy także zmieniać nazwy, jakie będą miały nasze połączenia na zewnątrz układu. Aby cofnąć „eksportowanie” musimy kliknąć PPM na polu, i najechać na Connections a następnie odznaczyć zaznaczony element.
- Clock – w tej kolumnie widoczne są informacje o sygnale zegarowym z jakiego korzysta dany moduł.
- Base oraz End – definiują adres początkowy i końcowy w przestrzeni adresowej dla danego modułu.
- IRQ – w przypadku korzystania z przerwań definiujemy tu numer przerwania, z jakiego korzysta dany moduł. Omówimy to w jednej z kolejnych części tej serii artykułów.
Pozostałe kolumny nie są w tej chwili dla nas interesujące.
Z czego zbudujemy nasz procesor? Po zapoznaniu się z terenem możemy przejść do pracy i wreszcie zbudować nasz własny system mikroprocesorowy. Zacznijmy od przyjrzenia się temu, co zostało dodane automatycznie do naszego systemu – modułowi clk_0. Ma on 2 wyeksportowane porty – clk oraz reset. Będą to wejścia tych sygnałów do naszego procesora (bo przecież prawie każdy procesor ma piny do podłączenia sygnału zegarowego oraz sygnału resetującego). Kolejne 2 porty, już nie widoczne na zewnątrz, to kopie odpowiednich sygnałów, które będą rozprowadzone po naszym procesorze.
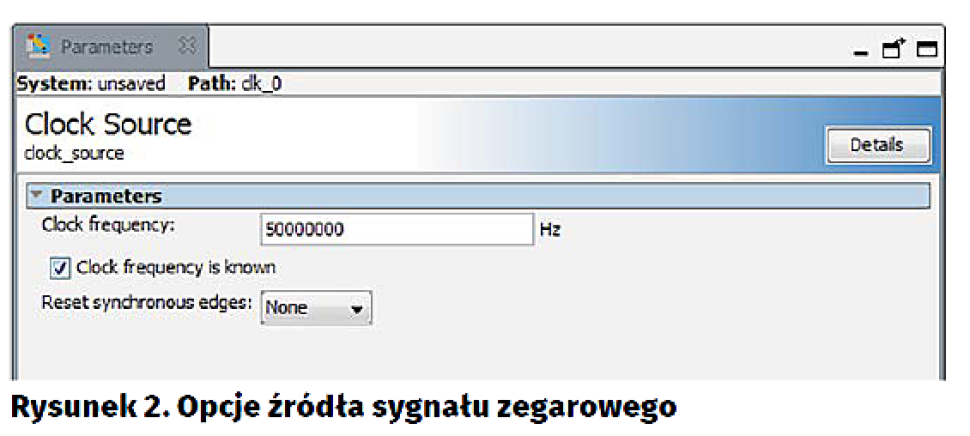
Jedyne, co na tym etapie musimy w tym miejscu zmodyfikować, to wprowadzić częstotliwość, którą będziemy taktowali nasz procesor. Będzie to 10 MHz, ponieważ taki oscylator jest zamontowany na płytce maXimator. Klikając przy otwartym okienku Parameters na pola poszczególnych portów modułu możemy czasem zobaczyć dodatkowe i interesujące informacje czy ustawienia.
Czy 10MHz to nie za mało? Możliwe, że tak, ale nic nie stoi na przeszkodzie, żeby do układu wstawić mnożnik częstotliwości i uzyskać praktycznie dowolną częstotliwość do taktowania procesora. Dokładnie tak, jak w bardziej rozbudowanych procesorach, np. ARM. Dlaczego jednak nie zamontujemy sobie od razu oscylatora o pożądanej częstotliwości? Odpowiedź jest prosta – im wyższa częstotliwość, tym większe problemy. Musielibyśmy dobierać odpowiednio parametry ścieżek, aby np. nie stanowiły one filtrów przy wyższych częstotliwościach. Znacznie wygodniej jest doprowadzić do układu niższą częstotliwość i powielić ją wewnętrznie zostawiając najtrudniejszą pracę inżynierom, którzy zaprojektowali dla nas „czarną kostkę”.
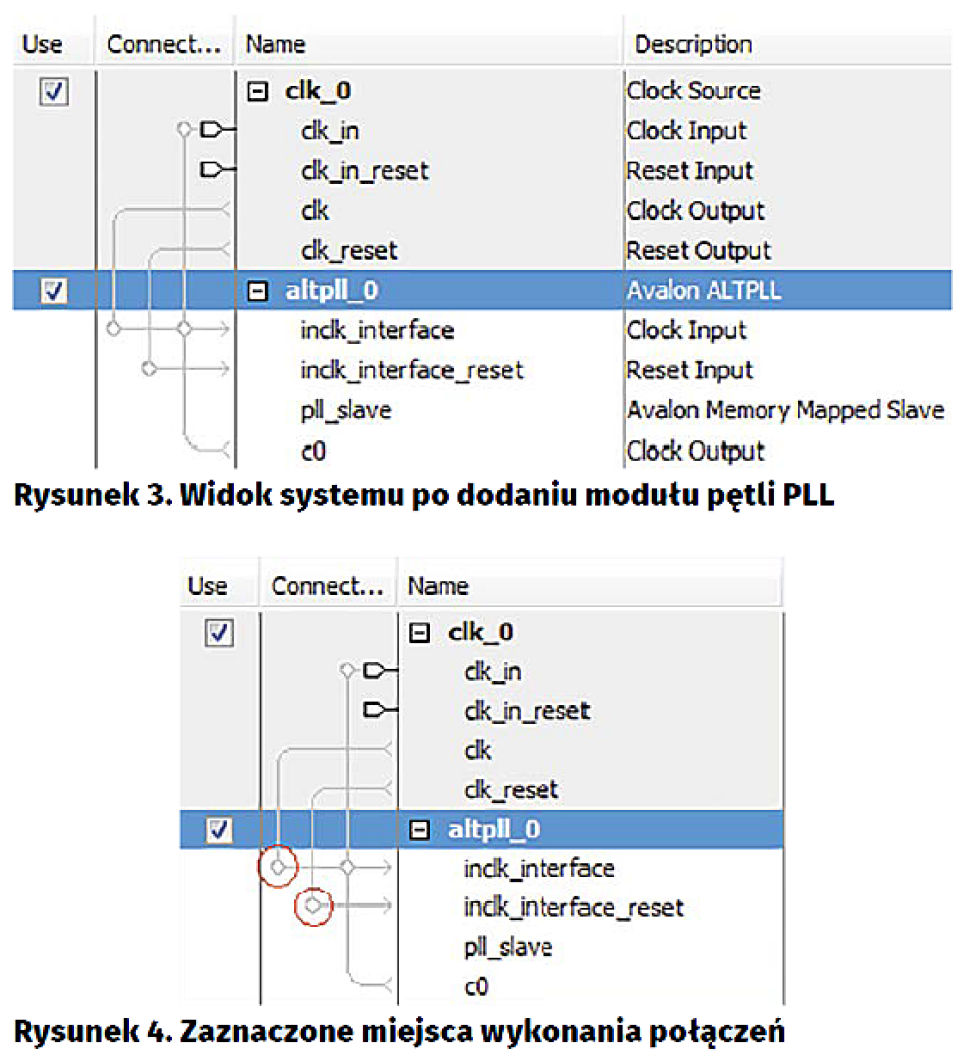
W widoku systemu pojawił się moduł pętli PLL oraz możliwość wykonania połączeń pomiędzy wejściem zegara a nowo dodaną pętlą PLL (rysunek 3). Następnie klikamy na punktach zaznaczonych na rysunku 4 czerwonymi kółkami. Dzięki temu wykonujemy połączenia między wyjściem sygnału zegarowego Clock Source, a wejściem zegara dla pętli PLL oraz łączymy sygnał resetujący. Jeśli istniałaby potrzeba usunięcia połączenia wystarczy ponownie kliknąć na „kropkę”. Jednocześnie warto obserwować pole Messages u dołu ekranu. Zawsze, gdy brakuje jakichś połączeń znajdziemy tam stosowny komunikat z wyjaśnieniem. Warto tez zapisać nasz system, np. pod nazwą tutorial. Polecam ponadto utworzenie osobnego katalogu w folderze naszego projektu i dopiero tam zapisanie naszego systemu.
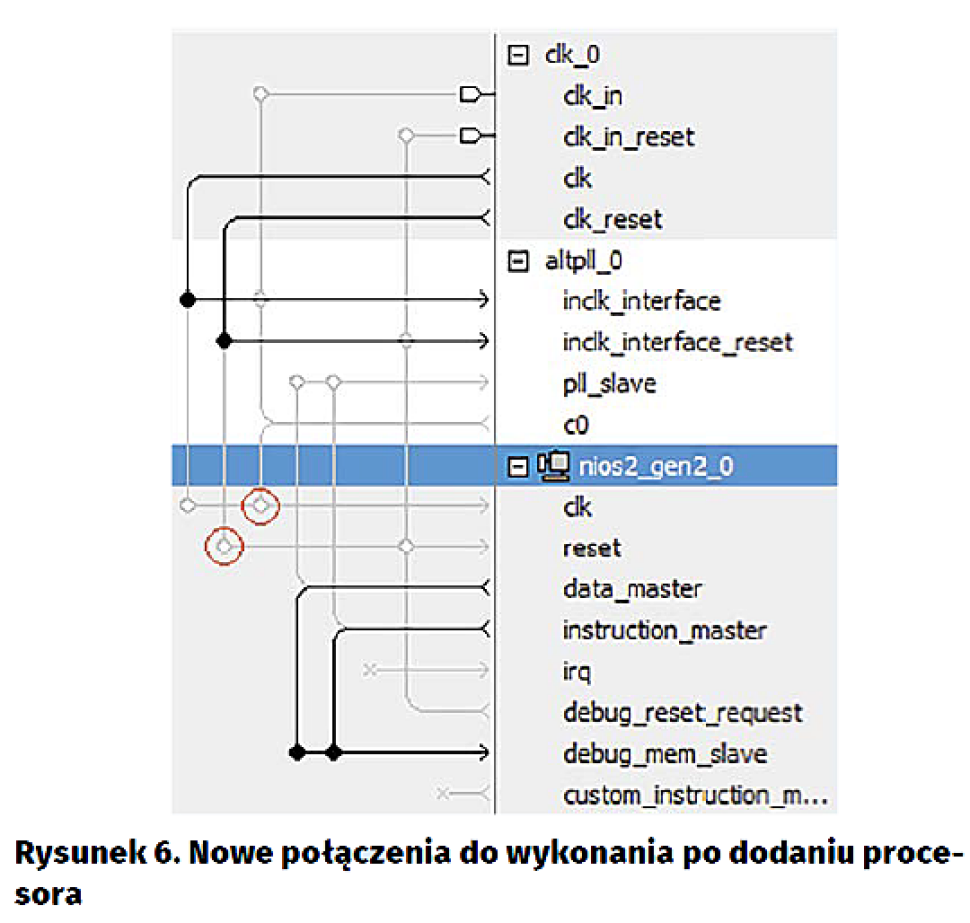
W widoku systemu zostanie pokazany nasz nowo dodany procesor – musimy teraz wykonać odpowiednie połączenia jego portów – a jest już trochę więcej możliwości niż poprzednio (rysunek 6). Na razie łączymy tylko sygnał taktujący rdzeń z wyjściem pętli PLL oraz sygnał resetu. Co dalej? W naszym systemie brakuje jeszcze pamięci.
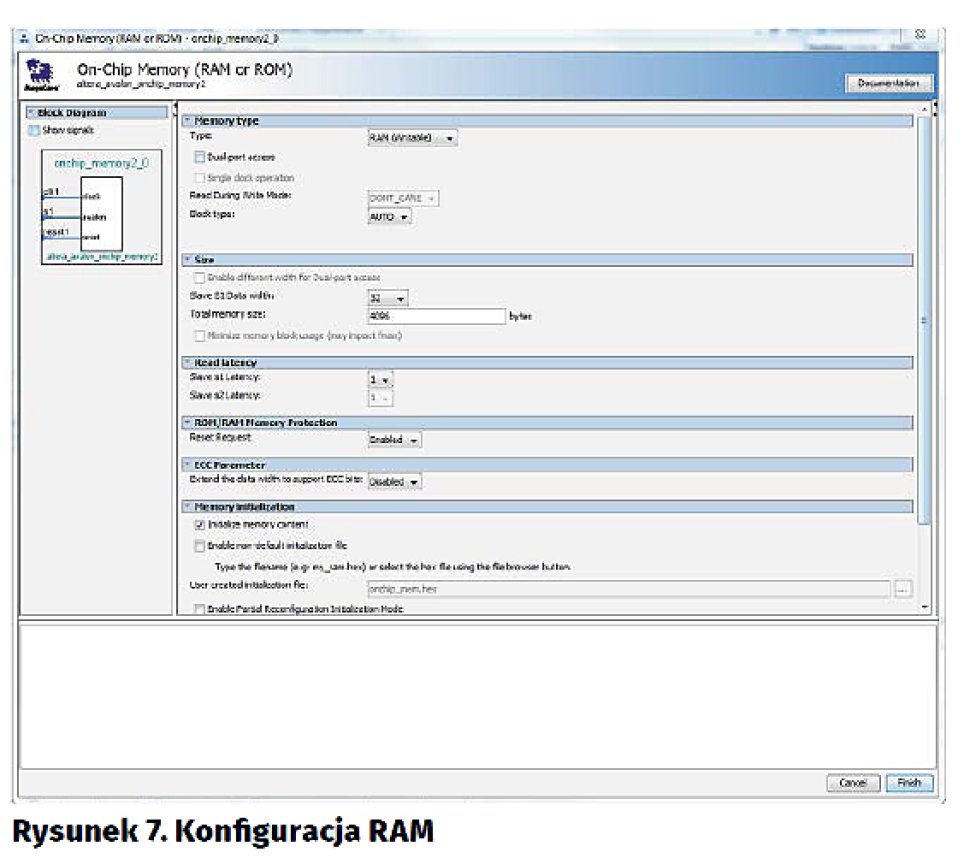
Zwykle w mikrokontrolerach znajdują się 2 osobne pamięci – RAM oraz pamięć programu. U nas moglibyśmy ten schemat powielić, jednak możemy wybrać metodę prostszą i bardziej elastyczną – zastosować jedną pamięć RAM. Dlaczego ta metoda jest bardziej elastyczna? Ponieważ na etapie kompilacji programu pamięć ta zostanie wirtualnie podzielona na część w której będzie przechowywany program oraz na część dostępną jako faktyczna pamięć RAM. Ma to szczególne znaczenie w układach takich jak nasz, gdzie dysponujemy stosunkowo ograniczoną ilością pamięci operacyjnej. Czy to jednak oznacza, że nasz procesor po odłączeniu zasilania straci swój program? Na szczęście nie, o czym opowiem jednak nieco później.
Wyszukujemy w IP Catalog RAM, a następnie wybieramy On-Chip Memory (RAM or ROM) – rysunek 7.
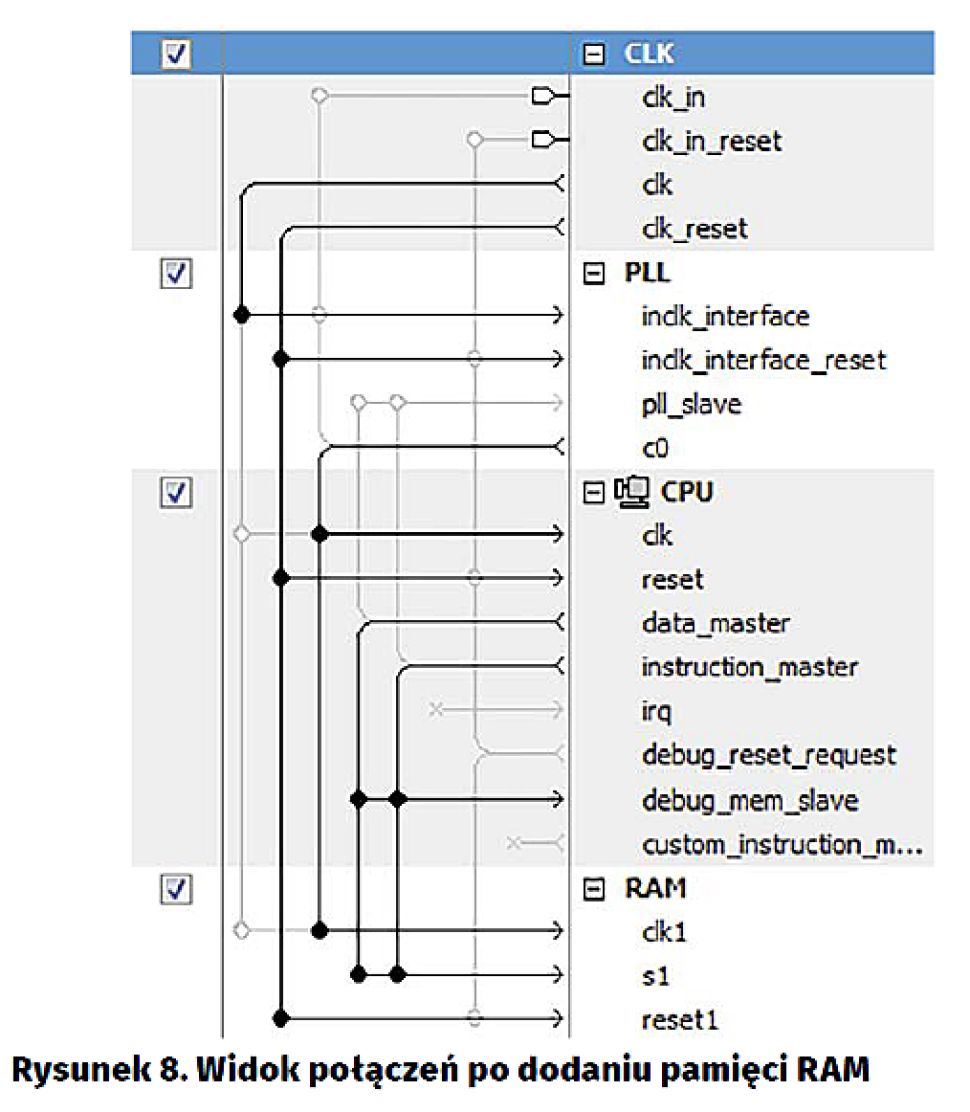
Teraz znów kolej na połączenia – sygnał zegarowy i reset łączymy tak jak w procesorze, zaś port s1 łączymy jednocześnie z portami data_master oraz instruction_master procesora. Jak nietrudno się domyśleć pierwszy port jest odpowiedzialny za transmisję danych (czyli połączenie z pamięcią RAM i innymi komponentami), zaś drugi – przesyła instrukcje (nasz program) do wykonania przez rdzeń. Przy okazji warto zmienić też nazwy komponentów na bardziej przyjazne. Efekt koniecznych działań pokazano na rysunku 8.
Teoretycznie, mamy już wszystkie wymagane komponenty, jednak dodamy jeszcze dwa. Nie są one niezbędne, ale znacząco ułatwią nam pracę, gdy zaczniemy pisać pierwszy program na nasz procesor.
Po pierwsze, dodajemy System ID Peripherial. W jego konfiguracji możemy wpisać dowolną wartość identyfikatora systemu. Po co taki komponent? Odpowiedź jest banalnie prosta – pomoże on debuggerowi sprawdzić, czy komunikuje się z właściwym procesorem podobnie jak programator sprawdza model podłączonego procesora podczas wgrywania wsadu np. do AVR czy STM32. Co więcej sprawdzać będzie on także datę syntezy naszego procesora. A wszystko to po to, aby mieć pewność, że program, który wgrywamy został skompilowany z właściwym kompletem BSP (Board Support Package), czyli w uproszczeniu mówiąc zestawem plików definiujących, pod jakimi adresami znajdują się jakie komponenty naszego systemu oraz jak są one skonfigurowane. Nie trudno wyobrazić sobie sytuację, w której wgrywamy do naszego procesora program, który dane zamiast wysłać na port szeregowy, kieruje w bliżej nieokreślone miejsce, bo zapomnieliśmy zaktualizować plików BSP.
Drugim elementem dodatkowym będzie JTAG UART – dodajemy go z domyślnymi ustawieniami. Reset i zegar łączymy w znany już nam sposób. avalon_jtag_slave łączymy z data_master naszego CPU. Dodatkowo, łączymy porty irq nowo dodanego modułu i rdzenia. Te ostatnie odpowiedzialne są za system przerwań, o którym opowiem w innej części tego kursu. Moduł ten pozwoli nam na komunikację między procesorem i komputerem przez debugger JTAG, bez konieczności używania dodatkowych połączeń interfejsu UART.
Uff, sporo pracy za nami, ale z okienka Messages zerkają na nas czerwone błędy… I to aż 8! Teraz przyjrzyjmy się im i spróbujmy po kolei przeanalizować wszystkie komunikaty i usnąć błędy, które są tutaj bardzo dobrze opisane (rysunek 9).
Może zacznijmy analizę od przyjaznych, zielonych informacji. Pierwsze dwie odnoszą się do dodanego przez nas komponentu służącego identyfikacji procesora przez debugger. Ostatnia dotyczy wymagań sygnału zegarowego taktującego moduł JTAG UART względem zegara debuggera.
Wyżej widzimy jedno samotne ostrzeżenie, które mówi o tym, że port sterujący pętlą PLL nie został połączony z CPU. Wykonajmy zatem jego połączenie z data_master. Mimo, że nie będziemy korzystać z tego modułu z poziomu procesora, warto dla porządku wykonać to połączenie.
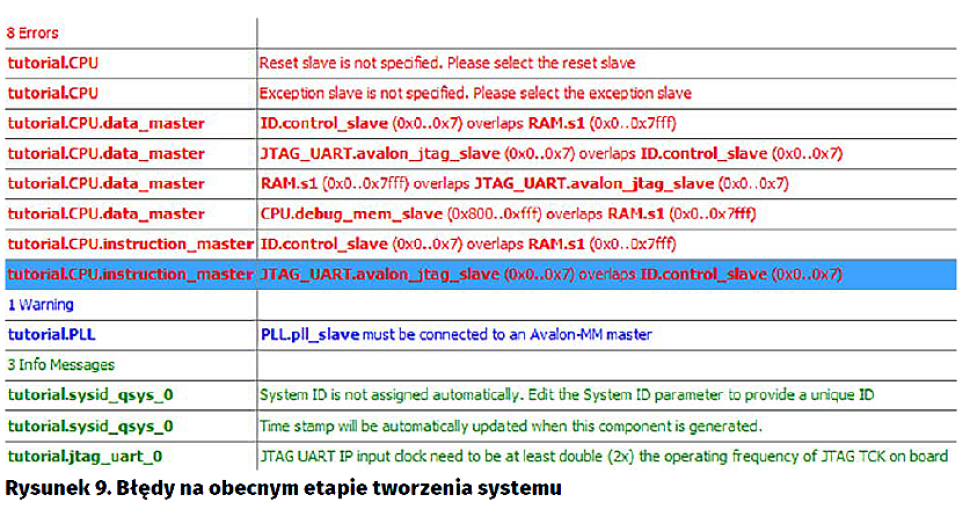
Jeszcze tylko 2 błędy, odnoszą się one do faktu, że nie podaliśmy naszemu procesorowi miejsca w pamięci, z którego ma rozpoczynać program, oraz do którego ma skoczyć w wypadku zgłoszenia wyjątku. Klikamy zatem na CPU w edytorze (jeśli nie jest widoczne okienko Parameters musimy kliknąć 2-krotnie), przechodzimy do zakładki Vectors i wybieramy w obu przypadkach RAM.s1.
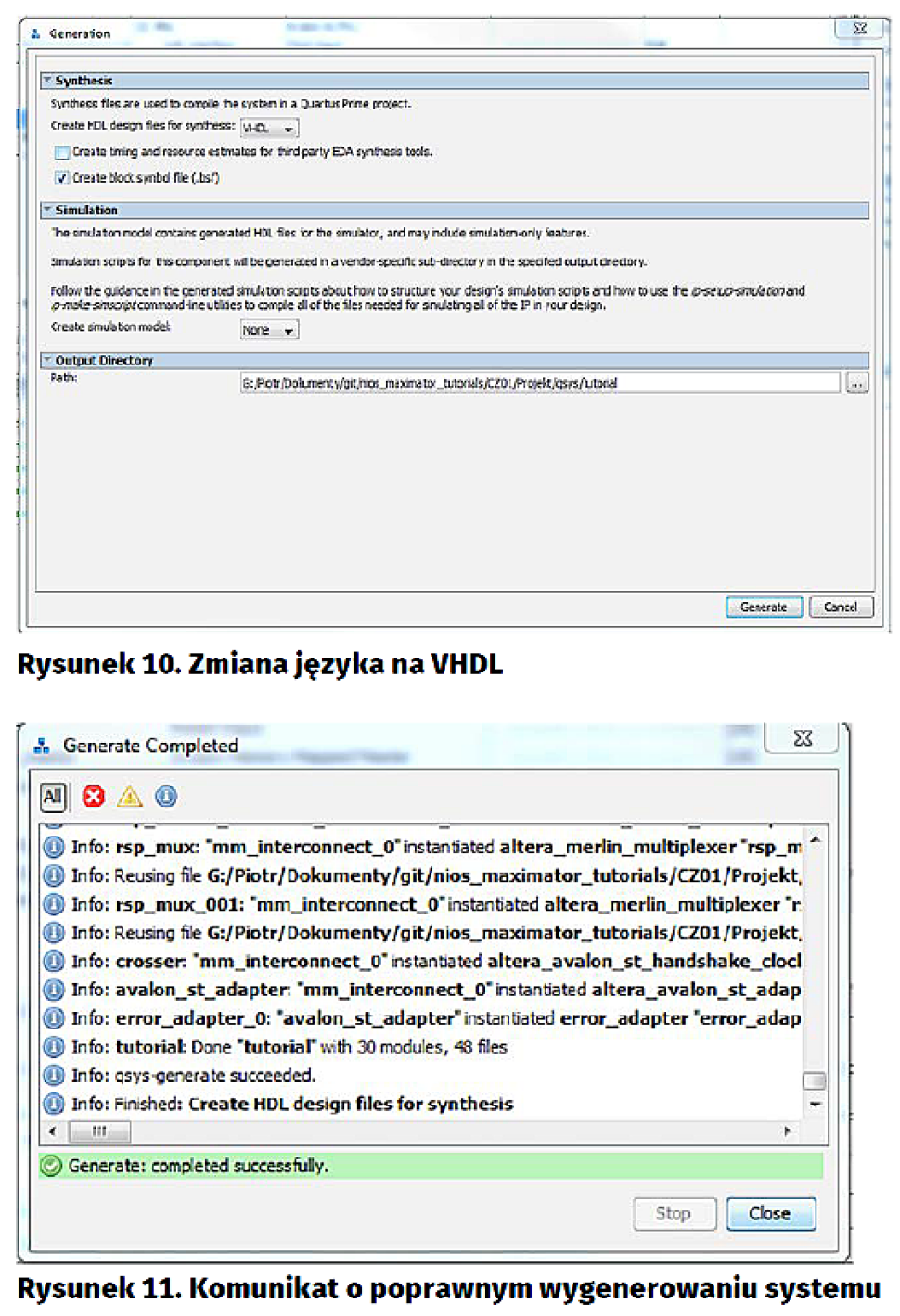
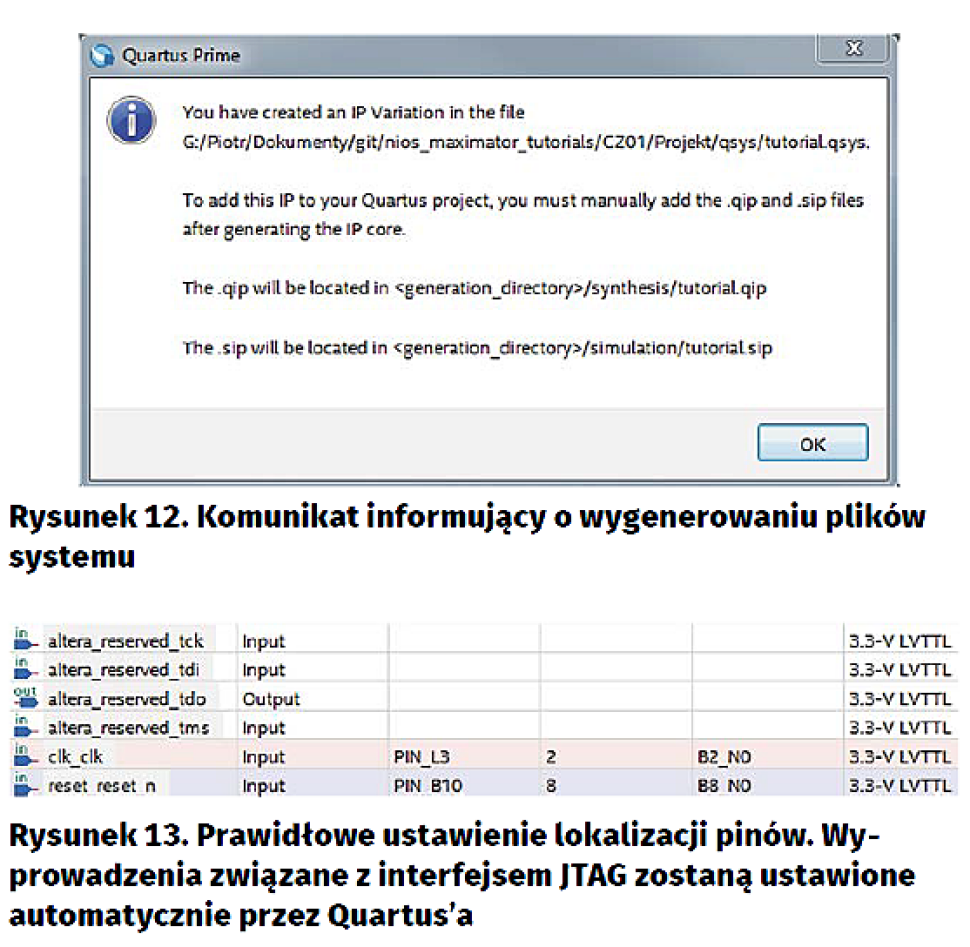
Wreszcie nasz system jest bezbłędny i możemy kliknąć na Generate HDL… (rysunek 10). Język syntezy zmieniamy z Verilog na VHDL i klikamy Generate. W okienku, które zostanie wyświetlone (i powinno poinformować o bezbłędnym zakończeniu operacji) klikamy Close. Zostaje wyświetlone kolejne okno, w którym po dłuższej chwili powinien być pokazany komunikat Generate: completed successfully (rysunek 11). Teraz nie pozostało nic innego jak kliknąć Finish. Po tej operacji będzie wyświetlony komunikat, jak na rysunku 12.
Teraz możemy kliknąć Analysis & Synthesis. Po paru chwilach projekt zostanie zsyntezowany i będziemy mogli przypisać jego wyprowadzenia do fizycznych pinów układu. W Pin Planner ustawiamy lokalizację clk_clk oraz reset_reset_n odpowiednio na piny L3 (oscylator 10 MHz na płytce) oraz B10 (przycisk DEV_CLRn na płytce). Ustawiamy standard wszystkich pinów (w tym 4 odnoszących się do interfejsu JTAG) na 3.3-V LVTTL (rysunek 13). Uruchamiamy Compile Design, a po zakończonym procesie – zaprogramować nasz układ (na razie plikiem .sof).
Piszemy pierwszy program
W tej chwili w naszym układzie FPGA zaczął (nie) działać pierwszy samodzielnie zaprojektowany system mikroprocesorowy. Czas go w pełni ożywić pisząc pierwszy program.
Tworzymy projekt i generujemy BSP. Zaczynamy bez przydługich wstępów od uruchomienia środowiska programistycznego: Tools Nios II Software Build Tools for Eclipse. Na początek zostanie pokazane okno wyboru środowiska pracy – klikamy OK. Jeśli w przyszłości będziecie dużo pracować, możecie utworzyć kilka środowisk pracy (Workspace). Podobnie po aktualizacji Quartusa do nowszej wersji możecie wybrać środowisko, którego używaliście w wersji starszej – domyślnie każda nowsza wersja wskazuje na inny folder, oznaczony jej numerem.
Wybieramy File Nios II Application and BSP form Template. W kolejnym oknie wskazujemy jako plik SOPC Information… plik tutorial.sopcinfo z folderu, w którym zapisaliśmy nasz system za pomocą Qsys. Po chwili program przeanalizuje definicję naszego systemu. Wpisujemy nazwę projektu, np. Tutorial01. Jako Project template wybieramy Hello World Small.
Dzięki temu zostaną pokazane de facto dwa projekty – jeden zwykły, a drugi z sufiksem _bsp. Ten pierwszy to projekt, w którym tworzymy nasz program, zaś drugi to pakiet BSP, o którym wcześniej wspominałem. Zawiera on wygenerowane na podstawie pliku .sopcinfo definicje adresów, obecnych w systemie komponentów (plik system.h) oraz drivery do tych komponentów. Klikamy PPM na nazwie projektu BSP i wybieramy Nios II Generate BSP. Czynność tę należy powtórzyć po każdej zmianie systemu dokonanej w Qsys – powoduje to aktualizację zawartości BSP względem pliku .sopcinfo.
Zaczynamy debuggowanie
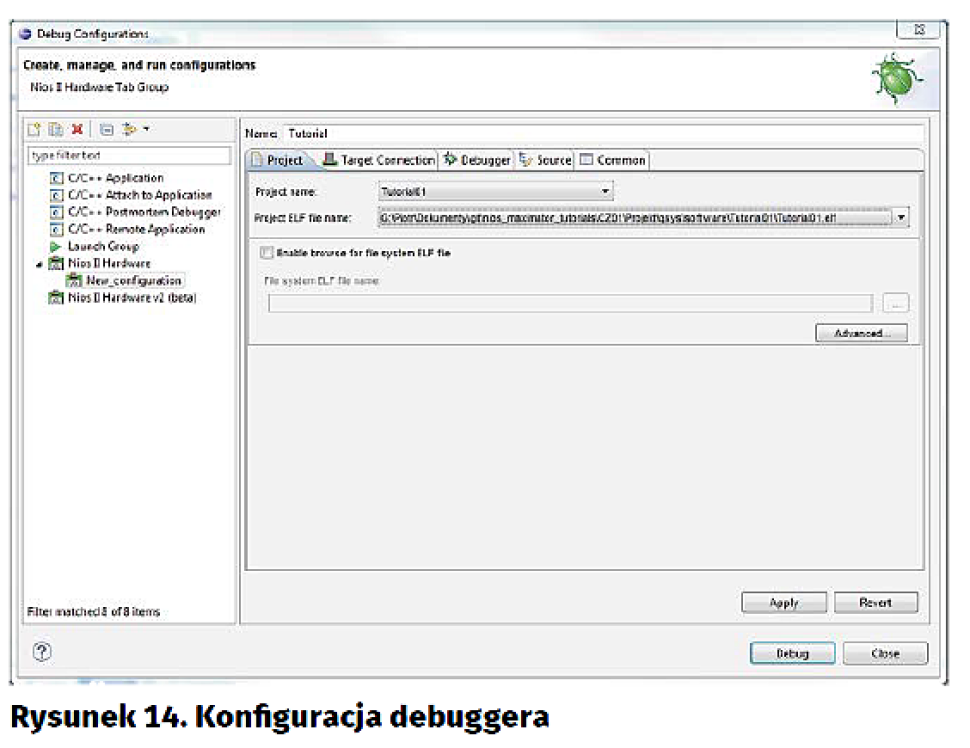
Aby wgrać nasz program do układu i jednocześnie zacząć jego debuggowanie musimy najpierw utworzyć konfigurację. W tym celu wybieramy Run Debug Configurations… i klikamy dwukrotnie na Nios II Hardware po lewej stronie okna (rysunek 14). Następnie z listy Project name wybieramy nasz projekt. Możemy także zmienić nazwę konfiguracji.
W zakładce Target Connection klikamy po prawej stronie Refresh Connections. Jeśli system nie zwróci błędów, znaczy, że wszystko przebiegło OK. Klikamy następnie Apply. Moglibyśmy teraz kliknąć na Debug, ale zatrzymajmy się w tym miejscu i przypomnijmy o komponencie System ID, który dodaliśmy wcześniej do projektu. Jeśli klikniemy w obecnie otwartym oknie System ID Properties…, to zobaczymy parametry, które są przechowywane przez wspomniany komponent i jego adres bazowy. Nieco niżej widzimy też pola, które pozwalają nam wgrać „na siłę” program, pomimo niezgodności parametrów identyfikacyjnych (pole System ID checks). Klikamy na Debug. W zależności od ustawień komputera może być konieczne zezwolenie oprogramowaniu na dostęp do sieci. W oknie, które pojawi się (z zapytaniem, czy chcemy przełączyć się na widok debuggowania), odpowiadamy twierdząco. Między widokami zawsze możemy przełączać się za pomocą przycisków w prawym górnym rogu okna – pokazano je na rysunku 15.
Teraz pora na omówienie tego widoku. U dołu widoczna jest Nios II Console – czyli terminal naszego JTAG UART! – powinien wyświetlać się tam komunikat wysłany przez nasz pierwszy program: Hello form Nios II! Powyżej znajduje się podgląd programu (gdzie możemy zobaczyć, gdzie wylądował nasz program jeśli wciśniemy przycisk wstrzymania pracy programu). Jeszcze wyżej widzimy podgląd stanu debuggera, zaś okna po jego prawej stronie służą do podglądu zmiennych, pamięci, rejestrów oraz kontroli breakpointów. Pamiętajmy, aby zawsze po zakończonej pracy kliknąć na przycisk zakończenia sesji debuggowania – inaczej, jeśli będziemy chcieli rozpocząć kolejną sesję program poinformuje nas o błędach. Po przyciśnięciu tego przycisku możemy wrócić do normalnego widoku.
Po bardzo długich bojach z systemem Nios II dotarliśmy wspólnie do końca tej części szkolenia. W jego czasie zapoznaliśmy się z systemem Nios II oraz środowiskiem Qsys. Następnie stworzyliśmy pierwszy działający system mikroprocesorowy i uruchomiliśmy na nim program.
Na początku te wszystkie połączenia i ilość informacji zawarta w tym artykule może przytłaczać, ale polecam powtórzenie wszystkich czynności (ze zrozumieniem!) kilka razy – ćwiczenie czyni mistrza i w końcu będziecie budowali takie systemy dokładnie rozumiejąc czemu podłączam do pamięci RAM port (magistralę) danych i instrukcji, a do komponentu portu szeregowego tylko magistralę danych.
Zadanie domowe po tej „lekcji” to – zrozumienie wszystkiego, co dziś się wydarzyło i nabycie umiejętności samodzielnego powtórzenia tych czynności oraz powtórzenie/zdobycie wiadomości nt. debuggowania programów z wykorzystaniem środowiska Eclipse.
Pozdrawiam i życzę pomyślnej pracy z Nios II.
Piotr Rzeszut












