 Zaloguj
Zaloguj




W tym artykule pokażę, jak:
Utworzyć nowy projekt w środowisku e2studio. Projekt będzie przeznaczony dla mikrokontrolera serii S1 R7FS124773A01CFM zamontowanego w module Arrow Aris EDGE (kompatybilnym sprzętowo z systemem ARDUINO).
- Skonfigurować driver interfejsu SCI do pracy w trybie SPI, wykorzystując konfigurator Synergy Configurator wbudowany w e2studio.
- Obsłużyć mały wyświetlacz OLED ze sterownikiem SSD1306 wykorzystując funkcje drivera r_sci_spi warstwy HAL biblioteki SSP.
- Skonfigurować dwa drivery interfeju I2C, wykorzystując konfigurator Synergy Configurator wbudowany w e2studio.
- Obsłużyć dwa czujniki: temperatury i wilgotności, wykorzystując funkcje drivera r_riic warstwy HAL biblioteki SSP.
- Zdefiniować i użyć funkcji callback przeznaczonych do powiadamiania między innymi o zakończeniu transmisji w interfejsach szeregowych.
Projekt
Użycie modułu Arrow Aris EDGE z mikrokontrolerem serii S1 R7FS124773A01CFM skutkuje brakiem wsparcia BSP (Board Support Package). Takie wsparcie mają tylko firmowe moduły ewaluacyjne. Jednak nie jest to żaden problem, bo odpowiednie konfiguracje wykonamy samodzielnie. Tworzenie projektu zaczynamy z menu FileNewSynergy Project (rysunek 1). W kolejnym kroku nadajemy naszemu projektowi w oknie Project name nazwę „interfejsy”, wybieramy bezpłatny kompilator GCCARM Embedded i podajemy ścieżkę dostępu do pliku licencji kompilatora, jeżeli nie była do tej pory podana. Pokazano to na rysunku 2. Ostatnie okno konfiguracji projektu zawiera okna wyboru:
- Wersji biblioteki SSP.
- Płytki ewaluacyjnej.
- Typu mikrokontrolera.
- Typu debuggera/programatora.
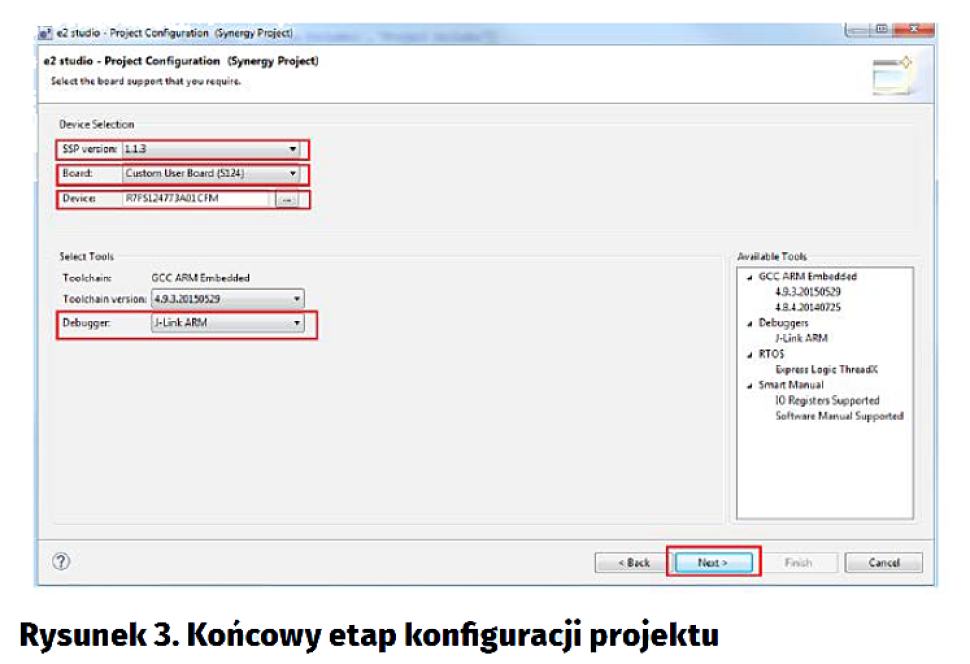
Po przejściu wszystkich etapów wstępnej konfiguracji wykonywanej w trakcie tworzenia nowego projektu konfigurator generuje szkielet projektu gotowy do skompilowania. Oczywiście taki projekt niczego nie robi i trzeba go uzupełnić o funkcje obsługi interfejsów komunikacyjnych warstwy HAL i ewentualnie o funkcje warstw wyższych.
Interfejs SPI
Konfigurowanie interfejsu dla samej konfiguracji nie ma większego sensu. Dlatego pokażę jak skonfigurować interfejs SPI sterujący pracą wyświetlacza OLED z wbudowanym sterownikiem SSD1306.
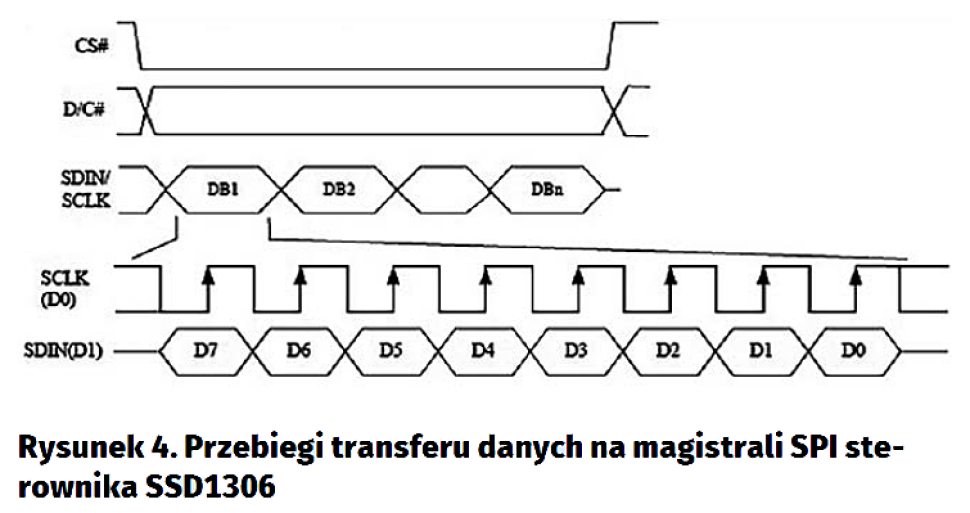
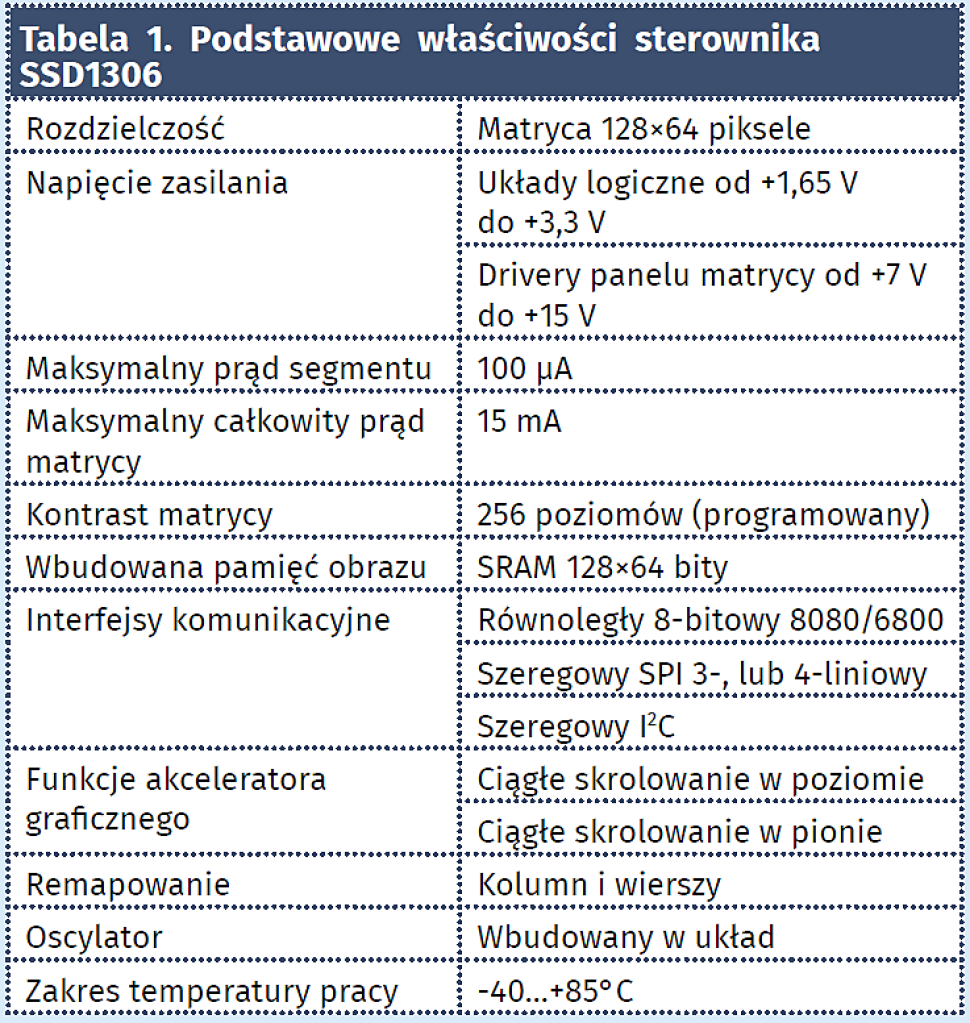
SSD1306 ma możliwość komunikacji za pomocą magistrali równoległej w standardzie Intel8080 lub Motorola 6800 oraz za pomocą magistrali szeregowej w standardzie SPI lub I2C. Dla aplikacji, w których jest ważna prędkość przesyłanych danych są wybierane magistrale równoległe. W pozostałych wypadkach – magistrale szeregowe. Dla typowych aplikacji z interfejsem użytkowania wystarczająca jest prędkość dostępna za pomocą interfejsu szeregowego. Podstawowe właściwości sterownika umieszczono w tabeli 1.
Organizacja pamięci obrazu, komendy sterujące, inicjalizacja sterownika itp. jest dokładnie opisana w dokumentacji sterownika i wyświetlacza. Sam moduł wyświetlacza był również opisywany na łamach Elektroniki Praktycznej i nie ma powodów by je tutaj powielać. Zajmiemy się głównym tematem naszych rozważań, czyli interfejsem SPI i jego konfiguracją.
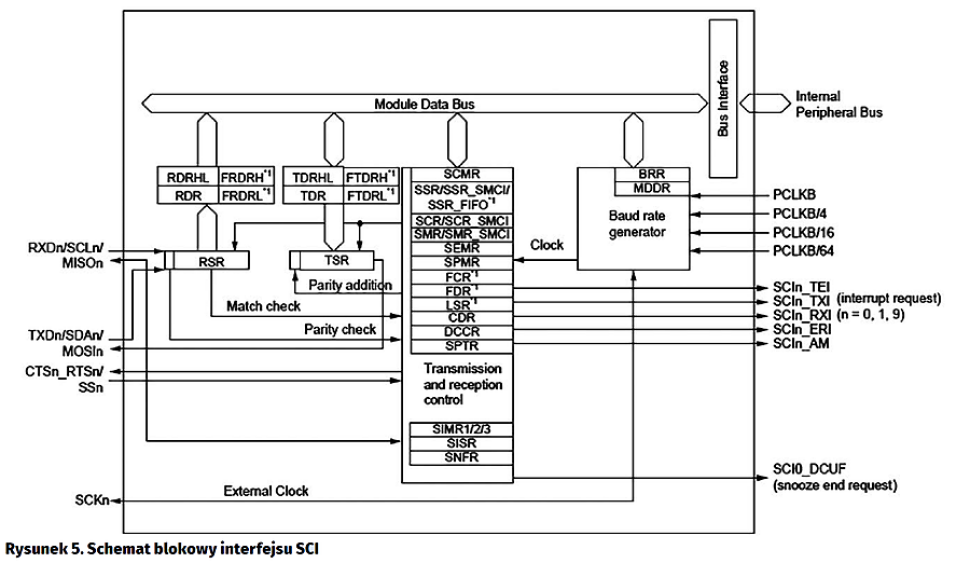
Mikrokontroler ma wbudowane dwa moduły SCI0 i SCI1. Schemat blokowy SCI pokazano na rysunku 5. Wbudowane rejestry bufora FIFO pozwalają na pracę w trybie full-duplex i bezprzerwowe wysyłanie danych. Ważnym elementem jest układ BRG – Baud Rate Generator ustalający prędkość wysyłania i odbierania danych niezależnie dla każdego z modułów SCI.
Konfiguracja interfejsu SCI w trybie SPI
Konfiguracja interfejsu z poziomu konfiguratora środowiska projektowego e2studio pozwala na ustawienie parametrów pracy interfejsu: wyboru kanału (numeru) interfejsu, trybu SPI, prędkości transmisji, fazy i polaryzacji zegara taktującego. Dodatkowo konfiguruje się układ przerwań niezbędny do działania drivera SPI. Konfigurator po zatwierdzeniu zmian dodaje do szkieletu projektu konieczne pliki źródłowe ze strukturami konfiguracji.
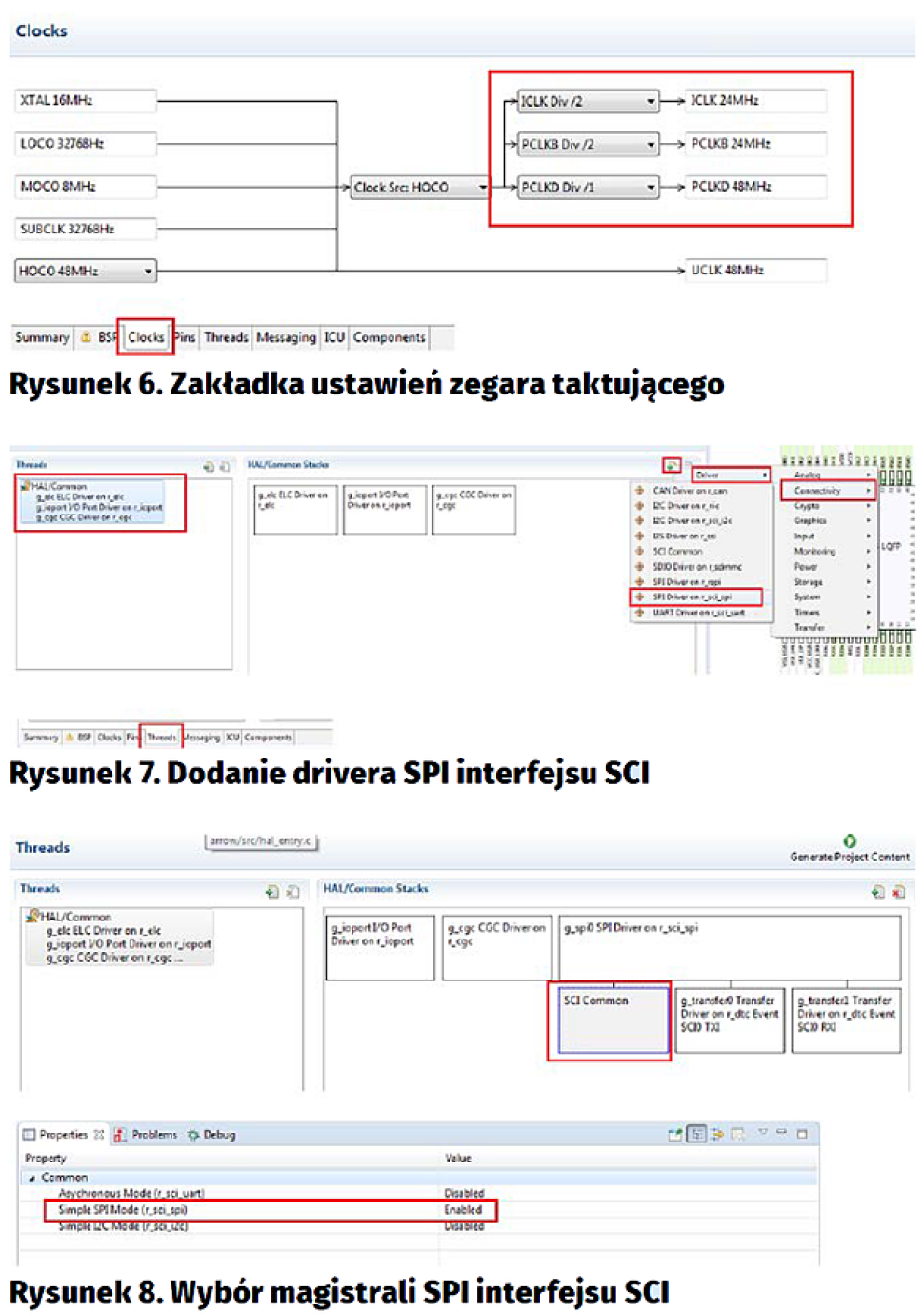
Po ustawieniu taktowania przechodzimy do zasadniczej fazy naszego projektu: wyboru interfejsu SCI i drivera z warstwy HAL. W zakładce Threads wybieramy HAL/Common i dodajemy driver klikając na ikonkę „plusa” w prawym górnym rogu okna HAL/Common Stacks. Z rozwijanego menu wybieramy: Driver Connectivity SPI Driver on r_sci_spi, jak pokazano na rysunku 7. Jak już wiemy, SCI może pracować w trybie SPI, UART lub I2C. Sposób wyboru interfejsu pokazano na rysunku 8. Dodany driver wymaga kolejnego konfigurowania wykonywanego w oknie Properties, jak pokazano na rysunku 9. Zależnie od potrzeb ustawiamy:
- Nazwę modułu i numer kanału SCI – wybieramy kanał zerowy.
- Tryb pracy modułu Master/Slave – wybieramy tryb Master.
- Polaryzację i fazę zegara taktującego transmisję – te ustawienia muszą się pokrywać z trybami pracy układu slave, w naszym wypadku – z trybem pracy magistrali SPI sterownika wyświetlacza.
- Kolejność wysyłania bitów w słowie – pierwszy najstarszy.
- Prędkość wysyłania bitów 100 kb/s.
- Nazwę funkcji callback – zostanie dokładnie opisana dalej.
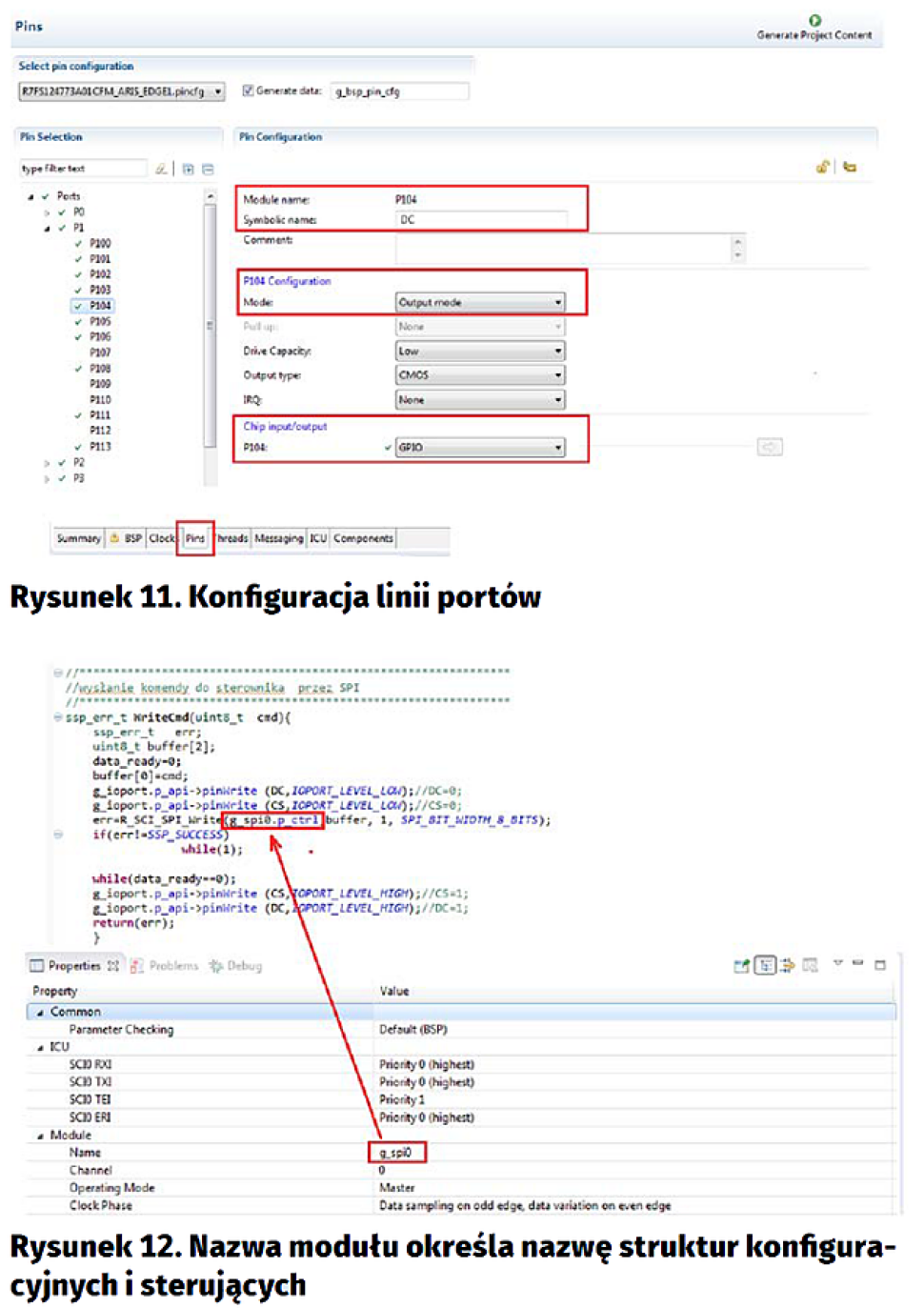
Na tym etapie kończymy konfigurowanie drivera SPI warstwy HAL i przechodzimy do warstwy niższej związanej ze sprzętem. Musimy zaprogramować odpowiednie linie portu przez przypisanie ich do linii interfejsu SCI. Wykorzystujemy w tym celu zakładkę Pins. W oknie Pins Selection wybieramy Pripherials SCI0_2_4_6_8. W oknie Pin Configuration przypisujemy liniom interfejsu linie portu P1 – rysunek 10. Skonfigurowane linie P100, P101, P102 i P103 można zobaczyć na rysunku obudowy mikrokontrolera umieszczonego w oknie Package. Każda z przypisanych linii musi być jeszcze skonfigurowana przez określnie głównie kierunku przepływu danych: wejście lub wyjście, jak na rysunku 11. Po wykonaniu wszystkich czynności konfiguracyjnych klikamy na przycisk Generate Project Content i konfigurator umieści w projekcie wszystkie pliki źródłowe i konfiguracyjne. Teraz musimy napisać sobie procedury warstwy aplikacji.
Obsługa interfejsu SPI jest wykonywana przez funkcje drivera SCI SPI R_SCI_SPI. Za ich pomocą użytkownik może zainicjować driver i wykonywać operacje transferu danych poprzez fizyczną magistralę SPI. Wszystkie parametry konfiguracji ustawiane na rysu. 10 są umieszczane w strukturze spi_cfg_t generowanej automatycznie przez konfigurator. Druga strukturą używana przed driver jest spi_ctr_t. Zawiera ona informacje o tym czy kanał komunikacyjny został otwarty, numer używanego kanału itp.
Jako pierwszą opiszemy funkcję otwarcia kanału drivera R-SCI_SSPI_Open.
|
ssp_err_t |
R_SCI_SSPI_Open (spi_ctrl_t *p_ctrl, spi_cfg_t const *const p_cfg) |
Jej argumentami są wspomniane struktury spi_ctrl_t i spi_cfg_t wygenerowane przez konfigurator. Funkcja sprawdza poprawność parametrów i ewentualnie generuje informacje o błędach, włącza zasilanie kanału SPI, blokuje przerwania i na podstawie wprowadzonych ustawień inicjalizuje rejestry konfiguracyjne SCI. Jeśli używamy więcej niż jednego drivera SPI pracującego z tą sama magistralą funkcja Open w połączeniu z funkcja Close pozwala na sterowanie dostępem driverów do magistrali. Wywołanie funkcji otwarcia kanału drivera będzie wyglądało następująco: err=R_SCI_SPI_Open(g_spi0.p_ctrl, g_spi0.p_cfg);. Wszystkie funkcje drivera zwracają informacje o statusie wykonania funkcji ssp_err_t. Status SSP_SUCCESS oznacza prawidłowe wykonanie funkcji. Każda inna wartość oznacza jakiś błąd.
Z funkcją otwarcia kanału jest skojarzona funkcja zamknięcia kanału
|
ssp_err_t |
R_SCI_SSPI_Close (spi_ctrl_t *const p_ctrl) |
Funkcja zamyka otwarty kanał, wyłącza jego zasilanie, blokuje przerwania skojarzone z obsługą drivera i odświeża status kanału. Jeżeli używamy jednego kanału SPI o stałych parametrach transmisji i nie używamy systemu RTOS, to nie ma potrzeby zamykania kanału SPI funkcją Close. W przypadku używania RTOS może się okazać, że różne watki będą rywalizować o jedna magistrale SPI. Obie opisywane funkcje pozwalają na zarządzanie zasobem, którym jest dostęp do magistrali SPI.
Do sterowania transferem danych na magistrali są przeznaczone 3 funkcje:
- R_SCI_SPI_Write – zapisywanie danych przez interfejs SPI.
- R_SCI_SPI_Read – odczytywanie danych za pomocą SPI.
- R_SCI_SPI_WriteRead – jednoczesne zapisywanie i odbieranie danych.
Dala nas jest najważniejsza funkcja zapisu danych na magistralę. Umożliwia ona zapisanie określonej liczby danych z bufora pamięci RAM. Jej działanie jest wykonywane w kilku krokach:
- Sprawdzenie poprawności parametrów i wygenerowanie ewentualnych informacji o błędach.
- Zablokowanie przerwań.
- Ustawienie długości przesyłanego słowa w bitach.
- Odblokowanie nadajnika danych.
- Odblokowanie przerwań.
- Rozpoczęcie transmisji danych po wykryciu przerwania zgłaszanego przez pusty bufor danych.
- Przekopiowanie danych z bufora źródłowego do rejestru danych modułu SPI.
- Odebranie danych po zgłoszeniu przerwania od zapełnionego bufora odbiornika.
- Ignorowanie odebranych danych.
- Zablokowanie nadajnika danych.
- Zablokowanie odbiornika danych.
- Zablokowanie przerwań.
- Funkcja R_SCI_SSPI_Write
|
ssp_err_t |
R_SCI_SSPI_Write (spi_ctrl_t *const p_ctrl, void const *p_src, uint32_t const length, spi_bit_width_t const bit_width |

- p_ctrl – wskaźnik na strukturę konfiguracyjną,
- p_src – wskaźnik na bufor z danymi do wysłania,
- length – liczba danych do wysłania,
- bit_width – długość słowa danych w bitach.
Podobnie jak funkcje Open i Close, jest zwracany status (kod błędu) wykonania funkcji spp_err_t. Zwrócenie SSP_SUCCESS oznacza, że jest możliwe wysłanie danych i moduł je rozpoczął. Każda inna zwrócona wartość sygnalizuje niepowodzenie transmisji i program użytkownika musi jakoś na to zareagować. Pozostałe funkcje: R_SCI_SPI_Read i R_SCI_SPI_WriteRead nie będą używane w procedurach obsługi wyświetlacza i nie będziemy ich dokładniej opisywać.
Programowa obsługa wyświetlacza
4-przewodowy interfejs SPI, oprócz linii MOSI, MISO i SCK, wymaga standardowej linii interfejsu SPI CS (P105) i linii DC (P104) określającej miejsce docelowe przesyłanych danych (rejestry sterujące, lub pamięć obrazu). Poza tym sterownik SSD1306 musi zostać sprzętowo wyzerowany przez wymuszenie stanu niskiego na linii RESET (P106). Wszystkie te linie musza być ustawione jako wyjściowe GPIO w zakładce Pins konfiguratora e2studio jak pokazano na rysunku 12. Wyprowadzenia płytki wyświetlacza nie zawierają linii wyjścia danych ze sterownika, a to oznacza jak już wiemy, że żadnych danych nie będziemy mogli odczytywać. Do sterowania wyświetlaczem będą nam potrzebne dwie procedury: zapisania rejestrów stepujących, czyli kodu komendy i ewentualnie jej argumentów oraz zapisania danej do pamięci obrazu wyświetlacza (listing 1 i listing 2).
Wysłanie komendy rozpoczyna się od wyzerowania linii DC (komendy) i CS (wybranie układu). Manipulacje poziomami linii wykonywane są za pomocą funkcji pinWrite warstwy HAL. Dane na magistralę są wysyłane przez funkcję R_SCI_SPI_Write.
Nazwa struktury sterującej p_ctrl dla funkcji R_SCI_SPI_Write jest określana automatycznie przez konfigurator projektu, jak pokazano na rysunku 13. Konfigurator deklaruje struktury konfiguracyjną i sterowniczą oraz zapisuje je wartościami określonymi w oknie Properties zwalniając programistę z wykonania tych czynności.
Wysyłanie danych jest zorganizowane identycznie, tylko przed wysłaniem danych na linia DC jest ustawiana (listing 2). Jak już wcześniej wspomniałem funkcja R_SPI_SCI_Write inicjalizuje wysyłanie danych i nie sprawdza czy transmisja została zakończona. Dobrze napisane funkcje biblioteczne nie mogą czekać w pętli na wystąpienie jakiegoś zdarzenia, w tym przypadku na zakończenie transmisji danych po magistrali SPI. Jednak wykrycie zakończenia transmisji jest konieczne do tego by móc wysłać kolejna daną i nie spowodować konfliktu na magistrali. W systemach wykorzystujących RTOS można zatrzymać wątek i na semaforze i czekać aż wysyłanie bajtu zostanie zakończone. My nie używamy RTOS i trzeba sobie poradzić inaczej. Zakończenie transmisji jest powiązane ze zgłoszeniem przerwania. Użytkownik może sobie napisać procedurę obsługi i tam testować wystąpienie przerwania sygnalizującego zakończenie transmisji danej. Jednak trochę koliduje to z ogólną ideą użycia bibliotek HAL. Dlatego wprowadzono mechanizm nazwany callback. Jeżeli w zakładce Callback okna Properties drivera SPI zamiast opcji NULL wpiszemy jakąś swoją nazwę, to konfigurator zdefiniuje prototyp funkcji o tej nazwie wywoływanej w momencie zgłoszenia przerwania. Argumentem tej funkcji jest wskaźnik na strukturę zawierającą między innymi informacje o zdarzeniach dotyczących transmisji przez SPI. Zostało to pokazane na rysunku 13. Użytkownikowi pozostaje tylko napisać tą swoja funkcję, umieścić ją w programie źródłowym i testować tam na przykład zdarzenie zakończenia transmisji. Ta funkcja musi być formalnie zdefiniowana zgodnie z wymaganiami biblioteki SSP – listing 3.
Zdefiniowałem zmienną globalną data_ready, która jest zerowana przed każdym wywołaniem funkcji transmisji R_SCI_SPI_Write. Po zakończeniu działania tej funkcji testuję jej wartość. Jeżeli w funkcji spi_callback zostanie wykryte zdarzenie SPI_EVENT_TRANSFER_COMPLETE oznaczające zakończenie wysyłania danej po magistrali SPI, to do data_ready jest wpisywana jedynka i procedury wysyłania danych mogą przejść do transferu kolejnej danej. Jak widać nie potrzebujemy pisać własnych procedur obsługi przerwania, ani testować bitów rejestrów konfiguracyjnych, czy rejestrów powiązanych z przerwaniami. Ten mechanizm działa z każdym mikrokontrolerem Synergy wspieranym przez aktualnie dostępna bibliotekę SSP i za każdym razem jest taki sam niezależnie od typu mikrokontrolera.

Przy adresowaniu Page Addressing Mode jest bardzo łatwo zdefiniować znaki o wysokości 8 pikseli lub o wielokrotności tej wartości: 16, 24, 32 itd. Najprościej definiować znaki np. 8×6 pikseli umieszczając w pamięci generatora znaków 6 kolejnych bajtów. Niestety, w tym wyświetlaczu znaki o wysokości 8 pikseli są praktycznie nieczytelne. Wynika to po prostu z małych wymiarów (przekątnej) matrycy. Wartością graniczną jest wysokość 12 pikseli, a najlepiej gdyby znaki miały 16 i więcej pikseli.
Do rysowanie znaków o dowolnej wielkości potrzebna będzie funkcja DrawPoint (listing 7), która umożliwia zaświecenie lub zgaszenie pojedynczego piksela o dowolnych współrzędnych x, y, niezależnych od trybu adresowania.
Na listingu 8 pokazano procedurę void DisplayChar() z argumentami:
- x i y – współrzędne początku znaku na ekranie,
- Chr – kod ASCII wyświetlanego znaku,
- size – wielkość znaku 12 lub 16 pikseli,
- mode=1 wyświetlanie normalne, mode=0 wyświetlanie w negatywie.
Zależnie od wartości argumentu size, bajty wzorca są pobierane z tablicy c_chFont1206[95][12] lub z tablicy c_chFont1608[95][16]. Jeśli argument mode jest wyzerowany, to dodatkowo wartość pobranego bajtu jest negowana. Potem jest analizowany każdy bit bajtu wzorca i zależnie od jego wartości DrawPoint () zapisuje do bufora DispBuff odpowiednią wartość.
Na listingu 9 pokazano procedurę void DispTxt() wyświetlającą łańcuch znaków od określonej pozycji z argumentami:
- x i y – współrzędne początku znaku na ekranie,
- *txt – wskaźnik na początek bufora z łańcuchem znaków,
- size – wielkość znaku 12 lub 16 pikseli,
- mode=1 wyświetlanie normalne, mode=0 wyświetlanie w negatywie.
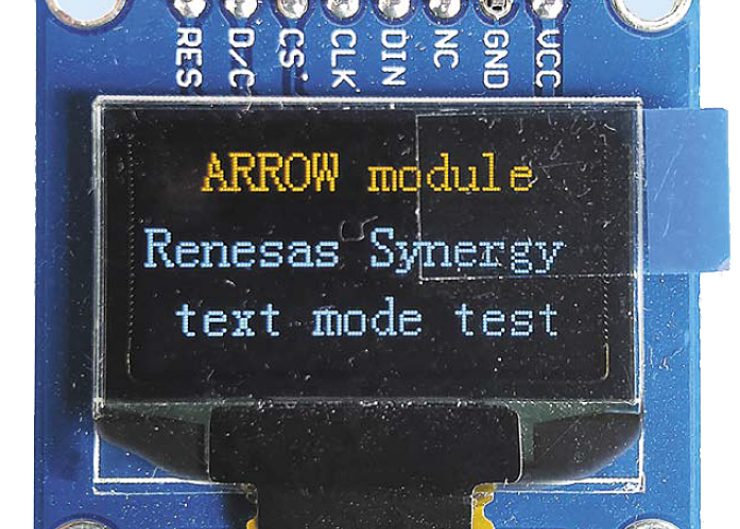
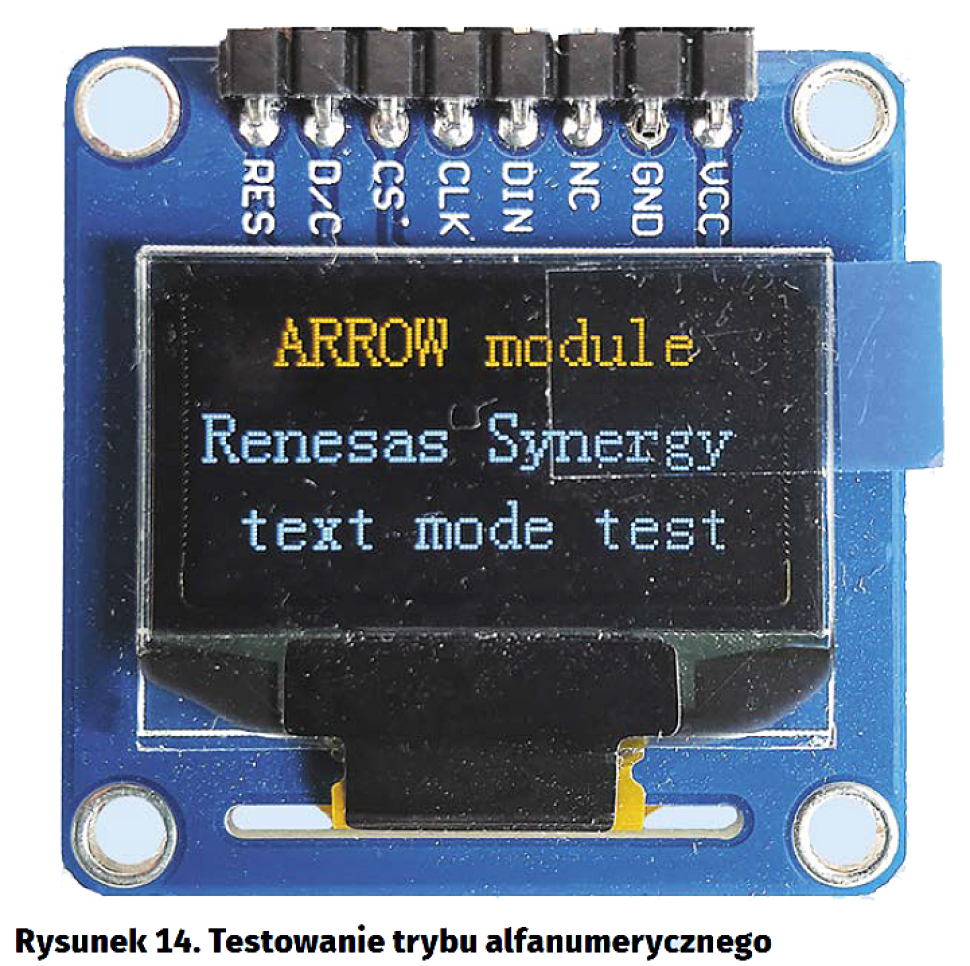
Testowanie trybu wyświetlania znaków alfanumerycznych wykonamy umieszczając trzy wywołania funkcji DispTxt w funkcji hal_entry, jak pokazano na listingu 10. Efekt działania tego testu pokazano na rysunku 14.
Każda czcionka wyświetlana w trybie tekstowym jest bitmapą rysowaną na ekranie. Te bitmapy – wzorce znaków umieszczane są w tablicy generatora znaków i mają jednakowe wymiary. Jednak często zachodzi konieczność wyświetlania bitmap o różnych wymiarach. Będziemy potrzebowali programu konwertującego bitmapy monochromatyczne na tablicę w języku C w formacie zgodnym z organizacją pamięci RAM sterownika wyświetlacza. Ja używam prostego programu bmp2.exe służącego do konwersji monochromatycznej mapy o niewielkiej rozdzielczości na tablicę w języku C. Kiedy już mamy skonwertowana bitmapę, to procedura jej wyświetlania jest stosunkowo prosta – pokazano ją na listingu 11. Wywołanie funkcji rysującej pełnowymiarową bitmapę pokazano na listingu 12. Tablica bmparray jest generowana automatycznie przez program bmp2.exe. Po zapisaniu bufora pamięci DispBuff procedura RefreshRAM przepisuje jego zawartość do pamięci sterownika wyświetlacza. Efekt działania programu wyświetlającego bitmapę jest pokazany na rysunku 15.
Tomasz Jabłoński, EP












