Zaloguj
Zaloguj




Interfejs I2C jest kolejnym omawianym w tym kursie interfejsem komunikacyjnym, typowym dla mikrokontrolerów. Służy on głównie do odbioru danych z czujników i komunikacji z urządzeniami niewymagającymi szybkiej transmisji danych. Tym, co wyróżnia go spośród innych interfejsów jest praca w trybie magistrali. Do pojedynczej szyny danych interfejsu I2C możemy przyłączyć wiele urządzeń, a dodanie kolejnych nie powoduje konieczności dodania kolejnych linii „Slave Select” (rysunek 1). Połączenie I2C składa się z linii SDA, którą w obu kierunkach przesyłane są dane (od urządzenia głównego do urządzeń podrzędnych i od podrzędnych do głównego) oraz linii SCL – przebiegu zegarowego generowanego przez urządzenie nadrzędne (master), do którego muszą się dostosować wszystkie urządzenia podrzędne (slave). Inny jest też sposób, w jaki korzysta się z interfejsu. Specyfikacja protokołu I2C nie ogranicza się do dostarczenia kanału, którym przesyłane są bajty danych między urządzeniami. Zamiast przesyłać do urządzeń specyficzne dla nich komunikaty, interfejs I2C pozwala w standardowy sposób zapisywać i odczytywać dane pod określonymi adresami w pamięci urządzeń – w rejestrach lub pamięci EEPROM.

Interfejs I2C opracowano w latach osiemdziesiątych w firmie Philips. Początkowo był on używany głównie w sprzęcie RTV tejże firmy. Obecnie jest powszechnie stosowany w wielu układach różnych producentów. Każdy układ ma swój własny identyfikator – najczęściej 7-bitowy, choć nowsze wersje protokołu przewidują również adresację 10- i 16-bitową. Identyfikatory te są przydzielane przez firmę NXP Semiconductors. Pierwsza wersja protokołu I2C pozwalała na transmisję danych z szybkością 10 kbps (low speed) lub 100 kbps (standard speed). Obecnie standard dopuszcza również inne szybkości – fast mode: 400 kbps, fast mode plus: 1 Mbps oraz high speed mode: 3,4 Mbps.
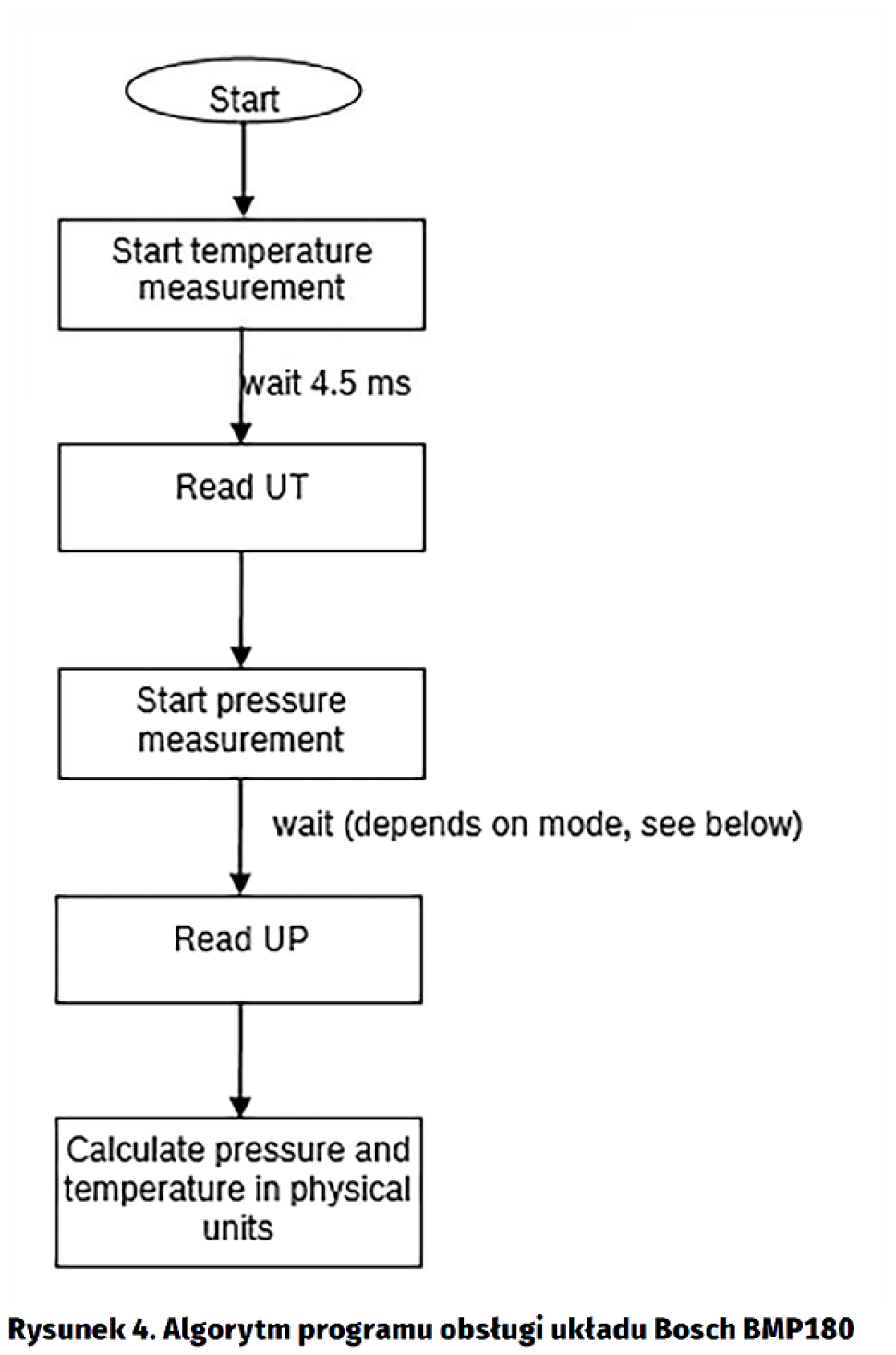
Czujnik Bosch BMP180 (rysunek 2) umożliwia pomiar temperatury i ciśnienia atmosferycznego. Umożliwia również obliczenie wysokości nad poziomem morza, na jakiej znajduje się czujnik. Jest on dostępny w wielu sklepach z elektroniką w postaci gotowych płytek z wyprowadzonymi pinami (rysunek 3) wprost do przyłączenia do mikrokontrolera. Czujnik pracuje w zakresie napięcia zasilającego 1,62…3,6 V, więc może współpracować bez układów dopasowujących poziomy logiczne z płytką rozwojową Kamami KA-NUCLEO-F411.
Temperatura jest mierzona z dokładnością do 0,1 stopnia w zakresie od -40…80°C, a ciśnienie z dokładnością do pojedynczego Pascala (z dopuszczalną odchyłką od 0,06 hPa do 0,02 hPa, zależną od wybranego trybu pomiaru) w zakresie 300…1100 hPa, co przekłada się na pomiar wysokości n.p.m. w zakresie od -500 do +9000 metrów, z dokładnością do 0,5 lub 0,17 metra (w zależności od trybu pomiaru).
Czujnika nie musimy kalibrować, natomiast uzyskane wyniki pomiarów należy skompensować – podstawić do wzorów, wraz z wartościami kompensacji zapisanymi w pamięci EEPROM układu.
Komunikacja z czujnikiem
Czujnik BMP180 ma 7-bitowy adres/identyfikator równy „1110111”. Razem z adresem w ramce I2C na pozycji 8 bitu w oktecie jest przesyłana flaga odczytu/zapisu. Zwyczajowo podając adres urządzenia w postaci liczby heksadecymalnej, podaje się jego „adres odbiorczy” i „nadawczy”, które dla tego czujnika wynoszą odpowiednio: 0xEF (odczyt) i 0xEE (zapis). Czujnik może przesyłać dane z prędkością do 3,4 Mbps.
8-bitowy rejestr pod adresem 0xF4 przyjmuje polecenia do wykonania – start pomiaru temperatury lub ciśnienia z ustaloną dokładnością.
Liczby zapisane w rejestrach AC1, AC2, AC3, B1, B2, MB, MC, MD to wartości ze znakiem (signed short/int16_t). Liczby z rejestrów AC4, AC5, AC6 to wartości bez znaku (unsigned/uint16_t).
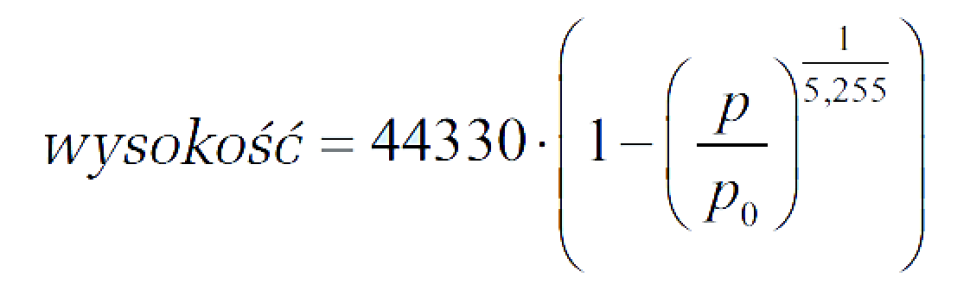
Algorytm wykonywania pomiarów, zamieszczony w karcie katalogowej czujnika przewiduje następujące akcje:
- Pobranie zawartości rejestrów AC1, AC2, AC3, AC4, AC5, AC6, B1, B2, MB, MC, MD i przechowanie ich w zmiennych.
- Zapisanie do rejestru 0xF4, wartości 0x2E, powodujące rozpoczęcie pomiaru temperatury.
- Odczekanie czasu 4,5 milisekundy.
- Pobranie i przechowanie w 16-bitowej zmiennej UT zawartości pamięci spod adresów 0xF6 oraz 0xF7.
- Zapisanie do rejestru 0xF4 polecenia wykonania pomiaru ciśnienia, z wybraną dokładnością – 0x34 dla najmniejszej dokładności, 0x74 dla standardowej, 0xB4 dla dużej lub 0xF4 dla największej.
- Odczekanie czasu 4,5 ms, 7,5 ms, 13,5 ms lub 25,5 ms (w zależności od wybranej dokładności pomiaru).
- Pobranie zawartości 24-bitów pamięci począwszy od adresu 0xF6 (0xF7, 0xF8) do zmiennej UP.
- Obliczenie, zgodnie ze wzorami podanymi w fragmencie karty katalogowej zamieszczonym obok, skompensowanej wartości temperatury i ciśnienia.
Wynikiem obliczeń będzie temperatura w 0,1°C oraz ciśnienie w Paskalach. Nie jest możliwe wykonanie pomiaru tylko ciśnienia atmosferycznego, polecenia należy wykonywać w ściśle określonej, przedstawionej powyżej, kolejności.
Obliczenie wysokości n.p.m. możliwe jest poprzez podstawienie zmierzonej wartości ciśnienia do wzoru
gdzie:
- p to zmierzona wartość ciśnienia,
- p0 wartość ciśnienia na poziomie morza (np. 1013,25 hPa).
Algorytm postępowania przy odczycie danych z czujnika BMP180 zamieszczono na stronie 15 karty katalogowej dostępnej w materiałach dodatkowych do tego artykułu.
Tworzymy projekt
Utworzymy teraz projekt realizujący opisaną powyżej procedurę odbioru danych z czujników i przesyłający te dane do komputera przez interfejs UART, programator ST-LINK i kabel USB.
Uruchamiamy program STM32CubeMX i tworzymy w nim nowy projekt. W kreatorze wyboru mikrokontrolera wybieramy posiadany przez nas układ. Dla przypomnienia – na płytce Kamami KA-NUCLEO-F411 używanej w tym kursie zamontowano układ STM32F411CEU6.
Układ STM32F411CEU6 ma trzy interfejsy I2C, które możemy uruchomić na wyprowadzeniach procesora:
- Moduł I2C1 – PB7 (SDA) i PB6 (SCL) lub PB9 (SDA) i PB8 (SCL).
- Moduł I2C2 – PB3 (SDA) i PB10 (SCL) lub PB9 (SDA) i PB10 (SCL).
- Moduł I2C3 – PB4 (SDA) i PA8 (SCL) lub PB8 (SDA) i PA8 (SCL).
W omawianym przykładzie wybrano moduł I2C1 oraz piny PB7/PB6 odpowiadające wyprowadzeniom płytki o oznaczeniach D9 i D10. Do tych wyprowadzeń dołączamy czujnik BMP180. Nie możemy też zapomnieć o rezystorach podciągających 4,7 kOhm (rys. 1), a także o połączeniu mas układów oraz zasileniu czujnika napięciem 3,3 V.
Po wybraniu modułu I2C oraz wyprowadzeń procesora, rozwijamy na liście po lewej stronie okna programu STM32CubeMX zakładkę odpowiadającą wybranemu modułowi i w polu „I2C” wybieramy pozycję „I2C” – standardowy tryb pracy.
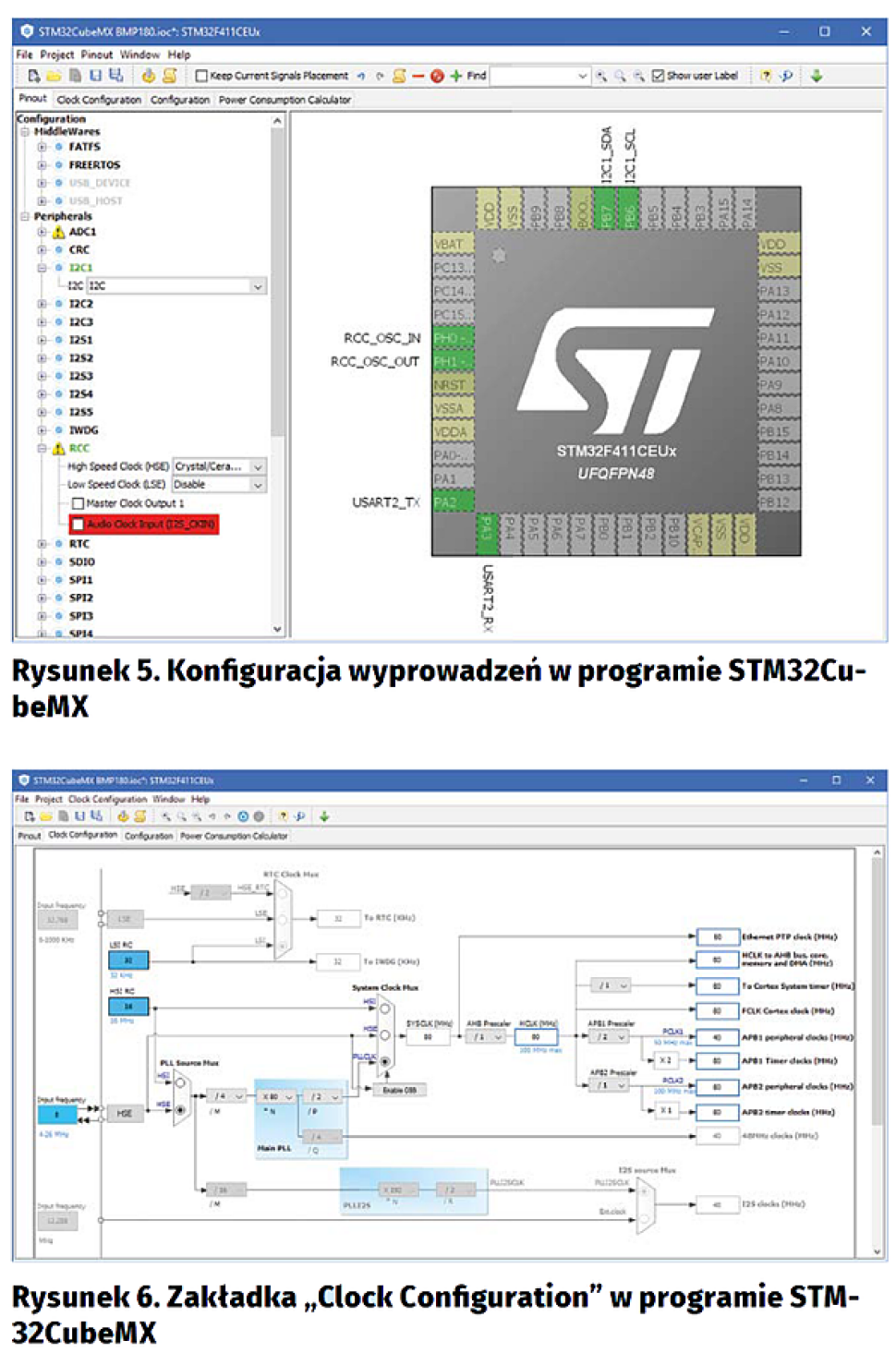
W projekcie skorzystamy także z interfejsu UART, a dokładniej modułu UART2 przyłączonego na płytce KA-NUCLEO poprzez wyprowadzenia układu PA2 (TX) i PA3 (RX) do programatora, który umożliwi nam przekazania odczytów do komputera. Dokładny opis konfiguracji i działania interfejsu UART zawarto w czwartej części kursu. Aby uruchomić interfejs UART, z listy w lewej części okna CubeMX rozwijamy zakładkę „UART2” i w polu „Mode” wybieramy opcję „Asynchonous” (rysunek 5).
Po skonfigurowaniu wyprowadzeń, przechodzimy do zakładki „Clock Configuration” (rysunek 6) i w identyczny sposób, jak w poprzednich częściach, konfigurujemy sygnał taktujący rozchodzący się po układzie. Jeśli do układu mikrokontrolera jest dołączony zewnętrzny oscylator kwarcowy, z pola „PLL Source MUX” wybieramy pozycję „HSE” i w polu „Input frequency” wpisujemy częstotliwość (w MHz) przebiegu generowanego przez oscylator (na płytce Kamami KA-Nucleo jest to 8 MHz). Dalej, w polu „System Clock MUX” wybieramy pozycję „PLLCLK”. Następnie, w polu „HCLK (MHz)” wpisujemy żądaną częstotliwość taktowania całego układu po przejściu przez pętlę PLL. Zazwyczaj wybieraliśmy w tym polu maksymalną dozwoloną częstotliwość - 100 MHz. Przy korzystaniu z modułu I2C nie jest to jednak możliwe, dlatego proponuję wpisać tam nieco niższą częstotliwość np. 80 MHz.
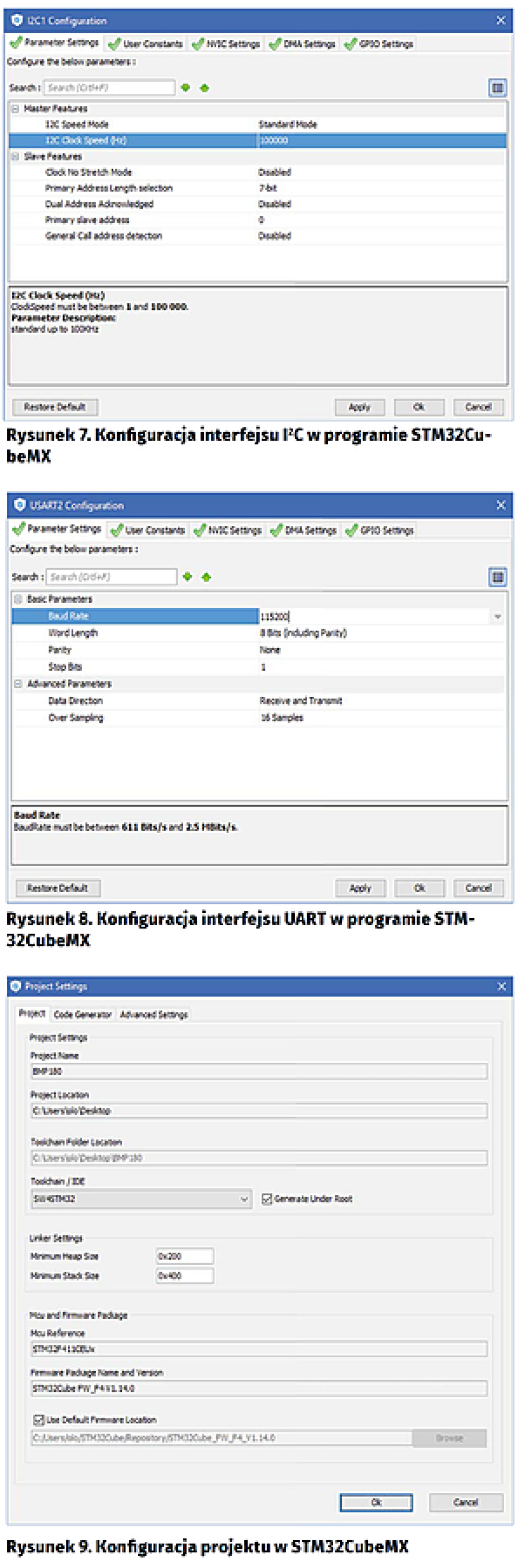
Pola „I2C Clock Mode” oraz „I2C Clock Speed (Hz)” określają szybkość transmisji. Przy wyborze trybu „Standard Mode” maksymalna częstotliwość taktowania, którą możemy ustawić to 100 kHz. Po wyborze opcji „Fast mode” w polu „I2C Clock Speed (Hz)” możemy wybrać maksymalną częstotliwość równą 400 kHz. Dla trybu pracy urządzenia podrzędnego (sekcja „Slave Features”), najważniejszymi opcjami są „Primary address length selection” oraz „Primary slave address”. Określamy w nich: długość adresu oraz sam adres urządzenia. Dla adresu 7-bitowego należy podać liczbę dziesiętną z zakresu od 0 do 127. Na podstawie tej wartości poprzez jej pomnożenie przez 2 lub pomnożenie przez 2 i dodanie 1, generowane są adres nadawczy i odbiorczy (rysunek 7).
Dla interfejsu UART zadowalają nas domyślne parametry połączenia – „Baud Rate: 115200”, „Word Length: 8 bits”, brak bitu parzystości (none) i 1 bit stopu (rysunek 8).
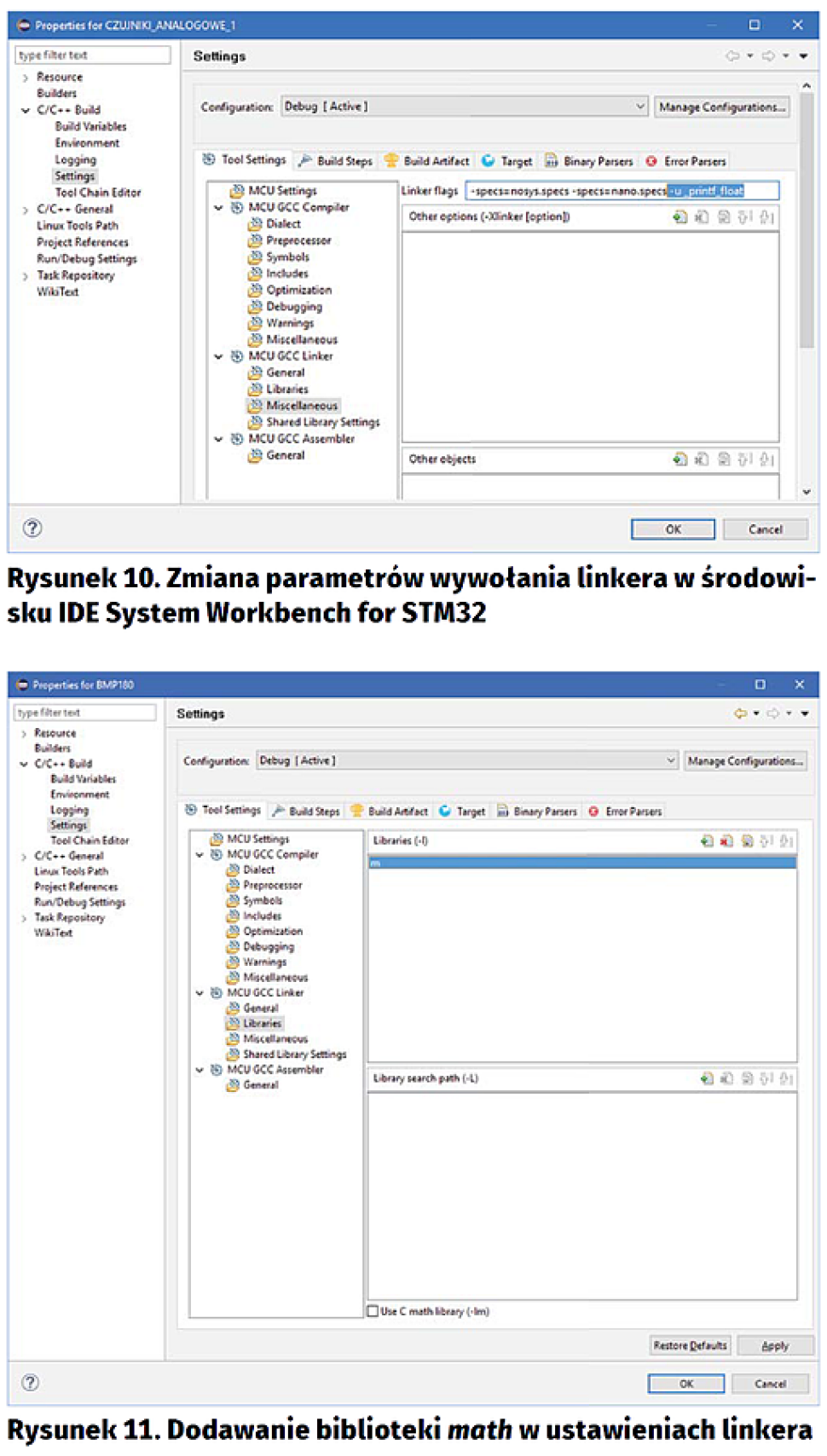
Nie pozostaje nam już nic innego, jak wygenerowanie projektu i zaimportowanie go w środowisku IDE. Będąc jeszcze w programie STM32CubeMX klikamy w ikonę zębatki znajdującą się na pasku narzędziowym. W nowym oknie wybieramy nazwę projektu (pole „Project Name”), ścieżkę dostępu do miejsca, w którym ma on zostać zapisany („Project Location”). Z pola „Toolchain / IDE” wybieramy używane przez nas środowisko – „SW4STM32”. W zakładce „Code Generation” zaznaczamy opcję „Generate peripheral initialization as a pair of ‚.c/.h’ files per pepipheral” i klikamy w przycisk „OK” (rysunek 9).
Uruchamiamy program System Workbench for STM32, zamykamy planszę powitalną, w ramce „Project Explorer” klikamy prawym przyciskiem myszy i z menu kontekstowego wybieramy „Import” „Existing Projects into Workspace”. Podajemy ścieżkę dostępu, wybieramy nowo utworzony projekt i zatwierdzamy import przyciskiem „Finish”.
Aby było możliwe korzystanie z wartości zmiennoprzecinkowych, w funkcji sprintf() jest konieczne dodanie parametru „-u _printf_float” do linii polecenia linkera. Robimy to klikając prawym przyciskiem myszy na nazwę nowego projektu. Z menu kontekstowego wybieramy pozycję „Properties” oraz nawigując do „C/C++ Build” „Settings” „Miscellaneous” i dopisując do pola „Linker flags” wartość: „ -u _printf_float” (rysunek 10).
Z powodu błędu w oprogramowaniu System Workbench, możemy mieć problem z kompilacją kodu zawierającego odwołania do funkcji z biblioteki math. Aby temu zaradzić, należy wejść w ustawienia projektu (klikamy prawym przyciskiem na jego nazwę i z menu wybieramy polecenie „Properties”). Następnie otwieramy kartę „C/C++ Build” „Settings” i w kolejnym panelu, wewnątrz nowej karty, rozwijamy „MCU GCC Linker” „Libraries”, przewijamy kartę w dół, odznaczamy opcję „Use C math library” oraz dodajemy (przycisk z plusem), w polu „Libraries”, bibliotekę o nazwie „m”. Dalej klikamy przycisk „Apply” oraz „OK” (rysunek 11).
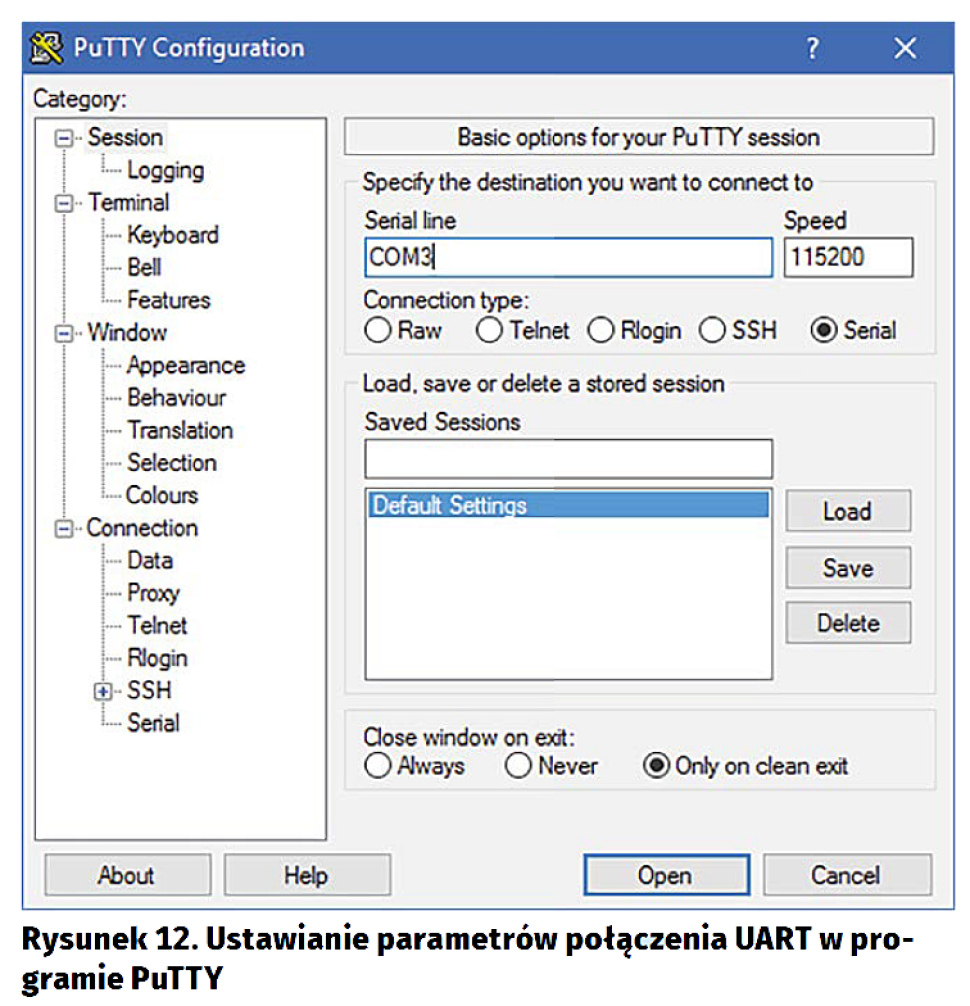
Po modyfikacjach zapisujemy zmiany w plikach, kompilujemy, wgrywamy i uruchamiamy program na mikrokontrolerze – klikamy w ikony młotka i robaka znajdujące się na pasku narzędziowym. Gdy program zostanie już uruchomiony, włączamy program PuTTY (opisany dokładniej w czwartej części serii), wybieramy w jego ustawianiach typ połączenia „Serial” i prędkość transmisji „115200 kbps” (rysunek 12). Nazwę portu szeregowego możemy sprawdzić w Menedżerze Urządzeń bądź dmesg-u i klikamy w przycisk „OK”.
Plik nagłówkowy („bmp180.h”) definiuje funkcje i struktury danych biblioteki. Jest dołączany wszędzie tam, gdzie istnieje potrzeba skorzystania z biblioteki. Towarzyszący mu plik „.c” („bmp180.c”) zawiera kod źródłowy tych funkcji. Aby korzystając z biblioteki wykonać pomiar i wydobyć wartości zmierzone, należy kolejno: znacjonalizować strukturę przechowującą odczytane wartości (bmp_state bmp = bmp_init(&hi2c1);), odczytać do tej struktury dane kompensujące wyniki pomiarów (bmp_read_compensation_data(&bmp);), wykonać pomiary temperatury i ciśnienia (bmp_read_temp_and_pressure(&bmp);), odczytać skompensowaną wartość temperatury (double temperature = bmp_get_temperature(&bmp);), ciśnienia atmosferycznego (doubel pressure = bmp_get_pressure(&bmp);) oraz obliczyć na podstawie ciśnienia wysokość nad poziomem morza (double altitude = bmp_get_altitude(pressure, 1013.25);). Zwracana przez funkcje wartości podawane są w następujących jednostkach:
- ciśnienie – hektopaskale,
- wysokość – metry nad poziomem morza.
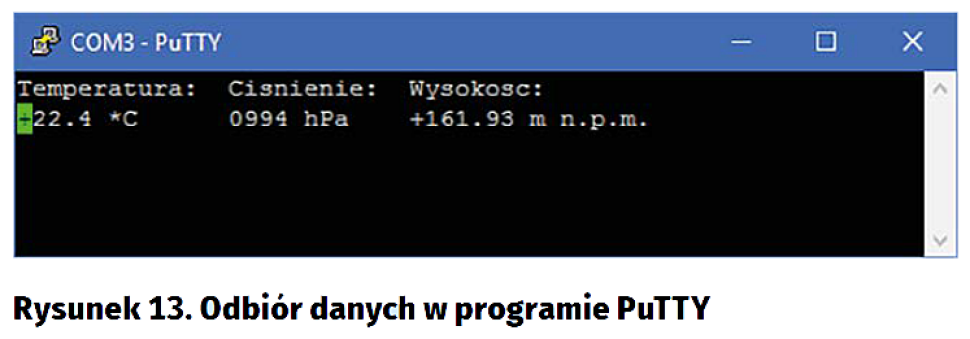
Następnie, w pliku „main.c” za pomocą funkcji sprintf() oraz HAL_UART_Transmit() parametry te zapisywane są do zmiennej typu string i wysyłane do komputera interfejsem UART (rysunek 13). Znaki „r” oraz „n” użyte w instrukcji sprintf() oznaczają, kolejno: powrót na początek linii oraz przejście do nowej linii. Dzięki zastosowaniu jedynie instrukcji „r” w drugim wywołaniu funkcji sprintf() wyniki wyświetlane w oknie PuTTY są cały czas nadpisywane w tej samej linii.
Interfejs I2C, podobnie jak pozostałe omawiane, może być używany w trybie DMA oraz w przerwaniach. Wywołania funkcji są niemal identyczne jak dla interfejsu SPI, czy UART.
Aleksander Kurczyk