 Zaloguj
Zaloguj



W poprzednich odcinkach kursu został omówiony zestaw CC2650 SensorTag [1], jego użytkowanie [2] oraz moduły rozszerzeń Debug DevPack, Display DevPack (LCD screen) i LED Audio DevPack [3]. Moduł CC1310 LaunchPad został omówiony w kolejnym odcinku [4]. W tym odcinku kursu zostanie pokazany system operacyjny czasu rzeczywistego TI-RTOS dla serii układów scalonych CC13xx/CC26xx. Przedstawione praktyczne ćwiczenie dotyczy zestawu CC2650 SensorTag.
Zestaw CC2650 SensorTag jest dostarczany z fabrycznie zaprogramowanym programem o wdzięcznej nazwie DEMO. Program jest zbudowany z zastosowaniem systemu operacyjnego TI-RTOS oraz stosu Bluetooth LE ver.4.2 [1, 2, 3].
Dokumentacja
Linki do aktualnych wersji podstawowej dokumentacji można znaleźć na stronie TI-RTOS [7]. Opis rdzenia systemu jest zamieszczony w dokumencie SYS/BIOS (TI-RTOS Kernel) User’s Guide [8]. Opis ogólny systemu jest zamieszczony w dokumencie TI-RTOS 2.20 User’s Guide [9]. Opis wersji dla procesorów serii CC26xx jest zamieszczony w TI-RTOS 2.20 for CC13xx/CC26xx SimpleLink Getting Started Guide [7] oraz w CC2640/CC2650 Bluetooth low energy Software Developer’s Guide [9].
Podstawowym źródłem dokumentacji zainstalowanej lokalnie w komputerze PC wersji systemu TI-RTOS jest plik Documentation_Overview_cc13xx_cc26xx.html zamieszczony w ścieżce C:titirtos_cc13xx_cc26xx_2_20_01_08docs. Pliki opisu mają format pdf oraz htm. Jest też dokumentacja drajwerów peryferyjnych w formacie Doxygen. W pliku są również odnośniki do stron internetowych. Na portalu społecznościowym TI E2E Community znajduje się bardzo przydatna strona CC2640/CC2650 Getting Started and FAQ [11]. Jest ona często aktualizowana i zawiera odpowiedzi na najczęściej zadawane pytania.
Warsztaty SimpleLink Academy
Bardzo ciekawą pomocą dla każdego, kto zaczyna pracować z procesorami rodziny CC13xx/CC26xx, są ćwiczenia warsztatowe SimpleLink Academy [15]. Dostępnych jest wiele ćwiczeń z dokładnym opisem oraz kodem źródłowym. Dla wielu ćwiczeń jest udostępniony zapis wideo.
System TI-RTOS
TI-RTOS (dawna nazwa DSP/BIOS) jest systemem operacyjnym czasu rzeczywistego ze skalowalnym jądrem (poprzednia nazwa SYS/BIOS) [5, 13]. System zawiera wiele dołączonych elementów w tym: stosy protokołów komunikacyjnych, obsługę komunikacji międzyrdzeniowej, sterownik urządzeń peryferyjnych i zarządzanie zasilaniem. System jest dostarczany z pełnymi źródłami i nie wymaga licencji.
Systemu TI-RTOS można używać z różnymi środowiskami programowymi. Dostarczany jest w wersjach dla różnych układów scalonych produkcji TI. System nie jest instalowany razem ze środowiskiem CCS. Należy go pobrać i zainstalować oddzielnie [5]. Dla procesorów serii CC26xx jest wersja TI-RTOS 2.20 for CC13xx/CC26xx [7]. Pakiet programowy CC26xxWare został zintegrowany z tą wersją systemu. Gdy jednocześnie jest stosowany stos Bluetooth LE, to należy pobrać i zainstalować pakiet SDK [6]. Zawiera on zarówno stos BLE, jak i odpowiednią wersję systemu TI-RTOS.
TI-RTOS jest wielowątkowym systemem operacyjnym czasu rzeczywistego z wywłaszczaniem. Ściśle z nim związane są narzędzia do synchronizacji i szeregowania (XDCTools) [9, 12].

- Przerwania sprzętowe (Hardware interrupt service routines (ISRs)) oraz Timer.
- Przerwania programowe (Software interrupt routines) oraz Clock.
- Zadania (Tasks).
- Funkcje tła (Background idle functions).
Zadanie systemu TI-RTOS może być w jednym z kilku stanów:
- Running: zadanie właśnie jest wykonywane.
- Ready: zadanie jest zaszeregowane do wykonania.
- Blocked: wykonywanie zadania jest zawieszone.
- Terminated: wykonywanie zadania jest zakończone.
- Inactive: zadanie jest na liście zadań nieaktywnych.
Tylko jedno zadanie może być wykonywane. Nawet jeśli jest to zadanie tła. Wykonywane zadanie może zostać zablokowane na semaforze. Może też samo zakończyć swoje działanie. W obu przypadkach procesor przełącza się na oczekujące zadanie gotowe o najwyższym priorytecie. Każde zadanie ma funkcję inicjalizacji oraz funkcję callback.
Sekwencja startowa systemu TI-RTOS
Sekwencja startowa jest logicznie podzielona na dwie fazy. Na rysunku 1 jest pokazana sekwencja obsługi funkcji main() przez, system TI-RTOS [16]. Pokazane są specyficzne punkty, w których mogą być wywołane funkcje dostarczane przez użytkownika.
Funkcja main() w pliku main.c foldera roboczego projektu środowiska IDE (np. CCSv7) jest punktem startowym czasu wykonania. W tym punkcie inicjalizowane są sterowniki przy zablokowanych przerwaniach. Inicjalizowane jest też zarządzanie zasilaniem oraz są tworzone zadania. Na koniec włączane jest zezwolenie na obsługę przerwań, uruchamiane jest szeregowanie zadań przez jądro systemu TI-RTOS – wywoływana jest funkcja BIOS_start(), która nie wraca nigdy do funkcji main().
Sekwencja startowa przed funkcją main()
Jest ona w całości sterowana przez pakiet XDCtools:
- Bezpośrednio po zakończeniu stanu reset procesora wykonaj specyficzną dla tego procesora sekwencję inicjalizacji.
- Wykonaj funkcję reset dostarczoną przez użytkownika.
- Wykonaj cinit() w celu inicjalizacji środowiska języka C.
- Wykonaj dostarczone przez użytkownika „first functions”.
- Wykonaj funkcje inicjalizacyjne.
- Wykonaj dostarczone przez użytkownika „last functions”.
- Wykonaj pinit().
- Wywołaj funkcję main().
Sekwencja po funkcji main() jest sterowana przez jądro systemu TI-RTOS. Rozpoczyna się po wywołaniu funkcji BIOS_start().
Wykonaj dostarczone przez użytkownika „startup functions”. Jeśli obiekty Timers zostały utworzone statycznie, to teraz zostanie wykonana ich statyczna inicjalizacja. Jeśli zostały skonfigurowane do automatycznego wystartowania, to zostaną uruchomione.
Włączane jest zezwolenie na obsługę przerwań sprzętowych.
Włączane jest zezwolenie na obsługę przerwań programowych (SWI).
Szeregowane są zadania. Jeśli nie ma żadnego zadania do uruchomienia, to rozpoczynana jest funkcja tła.
Ćwiczenie TI-RTOS Basic – Lab 1
Ćwiczenie pokazuje praktycznie (krok po kroku) używanie podstawowych elementów systemu operacyjnego czasu rzeczywistego TI-RTOS. Jest ono wzorowane na ćwiczeniu TI-RTOS Basic w portalu SimpleLink Academy [15]. Zostały jednak wprowadzone liczne zmiany i rozszerzenia.
Wymagania sprzętowe
Do pracy potrzebny jest zestaw CC2650 SensorTag z dołączonym modułem rozszerzeń Debug DevPack, połączony z komputerem kablem USB-A USB-Micro.
Komputer PC z systemem operacyjnym Windows 7 (lub nowszym).
Ćwiczenie można też wykonywać z użyciem modułu uruchomieniowego CC2650 LanuchPad lub modułu CC2650EM Evaluation Module z płytą SmartRF06 Evaluation Board.
Wymagania programowe
Zainstalowany program CCS v7 (lub nowszy).
Zainstalowany program BLE-STACK V2.2.1 (Support for CC2640/CC2650).
Instalowany jest:
- stos BLE w ścieżce C:tisimplelinkble_sdk_2_02_01_18;
- biblioteki systemu operacyjnego TI-RTOS w ścieżce C:titirtos_cc13xx_cc26xx_2_20_01_08;
- biblioteki zewnętrzne tego systemu w ścieżce C:tixdctools_3_32_00_06_core.
Zainstalowane źródła pakietu SimpleLink Academyv1.11 w ścieżce C:tisimplelink_academy_01_11_00_0000.
Istotna jest powyższa kolejność instalowania oprogramowania. Po zainstalowaniu każdego pakietu należy uruchomić CCSv7. Pozwala to na zbudowanie przez CCSv7 bazy projektów przykładowych dostarczanych przez pakiet.
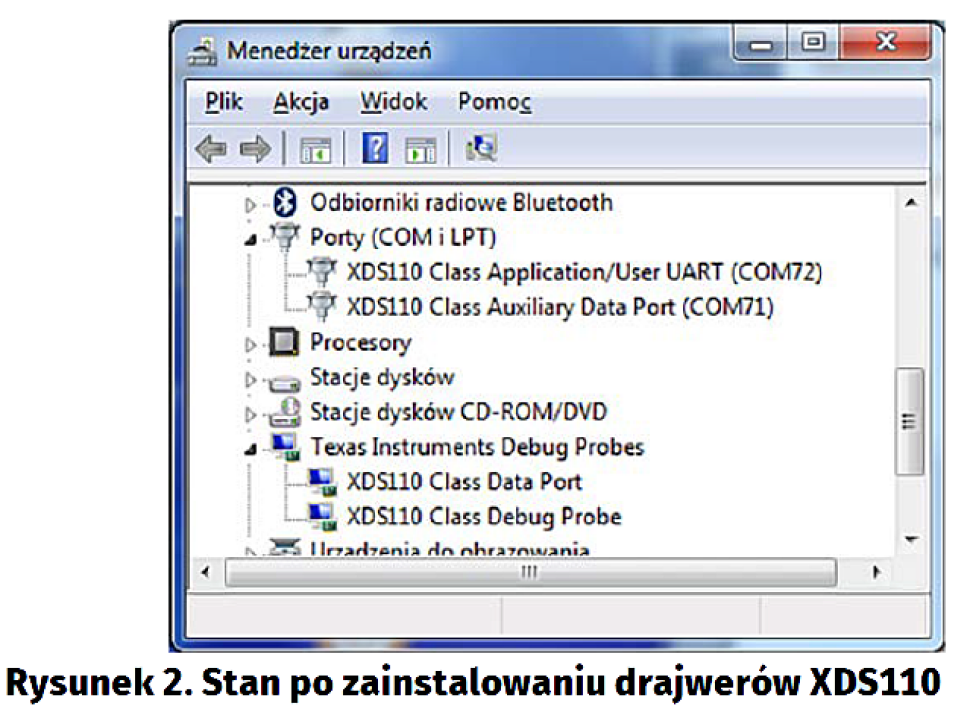
Do zestawu CC2650 SensorTag dołącz moduł rozszerzeń Debug DevPack (dokładny opis w [2]). Połącz go z komputerem kablem USB-A USB-Micro. Na płytce modułu Debug DevPack zaczyna świecić dioda LED, co sygnalizuje, że moduł jest gotowy do pracy.
Otwórz Menadżer urządzeń i czekaj, aż zostaną zainstalowane wszystkie drajwery sprzętowe (rysunek 2).
Uruchom program CCSv7. Dwukrotnie kliknij na jego ikonę.
W oknie Workspace Launcher wpisz ścieżkę do folderu roboczego, np. <C:home_dirwork_ART5>. Kliknij OK.
Obserwuj informacje na pasku w prawym dolnym rogu. Dotyczą one ładowania modułów środowiska Eclips oraz sprawdzania dostępności aktualizacji. Najlepiej zaczekać na zakończenie tych prac.
Zamknij okno Updates Avilable (jeśli się pojawi) lub wykonaj aktualizację.
Otwórz okno Resource Explorer z menu View ? Resource Explorer Classic.
W zakładce TI Resource Explorer rozwiń listę
SimpleLink Academy 1.11 ? TI-RTOS ? Projects ? Lab 1.
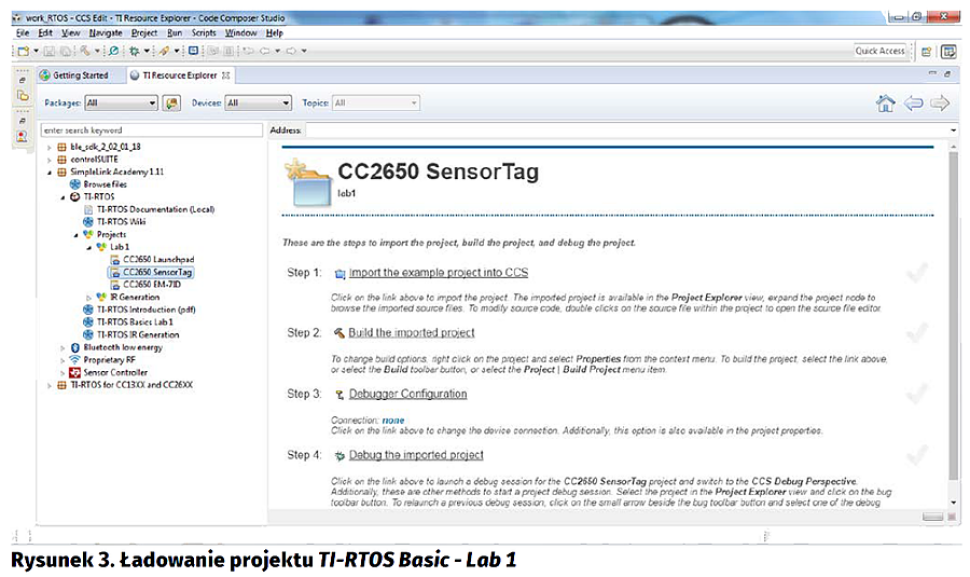
Kliknij na linię CC2650 SensorTag.
Po prawej stronie zostanie wyświetlona instrukcja, jak postępować w czterech krokach (rysunek 3).
Krok 1 – Importuj przykładowy projekt do CCS
Kliknij na odnośnik kroku 1. Po załadowaniu projektu zostanie pokazana w oknie Project Explorer linia projektu tirtos_lab1_cc2650stk [Active – Debug]. Otwierane są także w oknach edycji pliki lab1-main.c oraz lab1-main-solution.c.
Kliknij na zakładkę TI Resource Explorer. Zielony znaczek √ pojawi się na prawo od odnośnika kroku 1.
Jeśli znaczek się nie pojawi, należy kliknąć w zakładce TI Resource Explorer na linię CC2650 SensorTag.
Krok 2 – Zbuduj projekt tirtos_lab1_cc2650stk
W celu zbudowania projektu wybierz z menu Project ? Clean.
W oknie Clean kliknij na OK.
Pojawią się okna „Console” i „Problems”. Podczas budowania postęp wykonania jest pokazywany w oknie „Progress Information” oraz w oknie „Console”.
Na końcu w oknie „Console” zostanie pokazana informacja o pomyślnym wygenerowaniu pliku kodu ‘Finished building target: tirtos_lab1_cc2650stk.out’
Zielony znaczek √ pojawi się na prawo od odnośnika kroku.
Jeśli znaczek się nie pojawił, to trzeba w zakładce TI Resource Explorer kliknąć na linię projektu CC2650 SensorTag.
Uwaga! Polecenie Clean powoduje usunięcie wszystkich plików pośrednich projektu i zbudowanie całego projektu od początku. Pozwala to na uniknięcie kłopotów związanych z niepełną zgodnością wersji różnych bibliotek związanych z projektem.
Krok 3 – Wybierz typ emulatora sprzętowego
Jeśli typ emulatora nie został wcześniej zdefiniowany, to kliknij na odnośnik kroku 3. Z listy wybierz „Texas Instruments XDS110 USB Debug Probe”. Kliknij OK. Zielony znaczek √ pojawi się na prawo od odnośnika kroku.
W oknie „Project Explorer” rozwiń drzewo projektu tirtos_lab1_cc2650stk oraz pozycję targetConfigs node. Został zdefiniowany plik CC2650F128.ccxml oraz ustawiony jako [Active/Default].
Krok 4 – Debuguj projekt tirtos_lab1_cc2650stk
Kliknij na odnośnik kroku 4.
Czekaj, aż kursor w oknie edycyjnym lab1-main.c zostanie umieszczony w pierwszej linii funkcji main().
Zostało wykonanych kilka operacji:
Otworzenie sesji debugowej oraz otworzenie perspektywy CCS Debug.
Połączenie debuggera poprzez emulator XDS110 i port JTAG z układem scalonym CC2650.
Zbudowanie narzędzi zewnętrznych XDCtools systemu TI-RTOS.
Załadowanie (zaprogramowanie) kodu z pliku *.out do wewnętrznej pamięci Flash układu scalonego CC2650.
Wyprowadzenie układu CC2650 ze stanu RESET i uruchomienie wykonania kodu załadowanego programu (preambuła języka C).
Zatrzymanie wykonywania załadowanego programu na pułapce umieszczonej w pierwszej linii kodu (asemblerowego) tego programu.
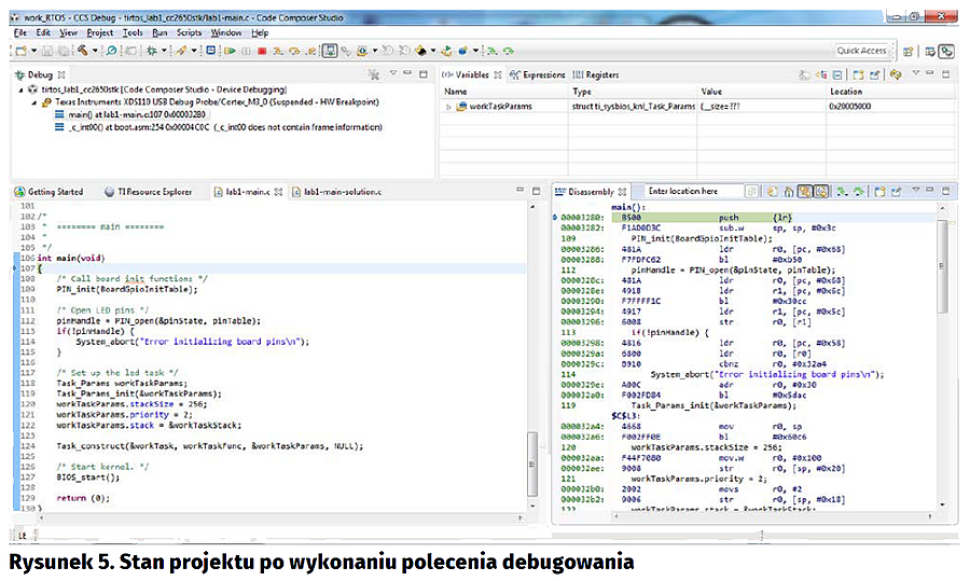
Z menu View ? Disassembly otwórz okno Disassembly (rysunek 5).
W oknie Disassembly można zobaczyć aktualną zawartość licznika rozkazów (PC). Niebieska strzałka pokazuje na pierwszą instrukcję asemblerową funkcji main(). Kod binarny z pamięci wewnętrznej układu CC2650 jest odczytywany, dekodowany (disasemlerowany) i instrukcje asemblerowe są pokazywane w oknie Disassembly. Jest to najlepszy (i chyba jedyny skuteczny) sposób na kontrolowanie stanu połączenia debuggera (CCS) z układem scalonym oraz stanu wykonywanego programu.
Wgląd w projekt tirtos_lab1_cc2650stk
Sprawdź okno edycyjne pliku lab1-main.c.
System TI-RTOS dostarcza wiele sterowników peryferyjnych dla procesorów CC26xx. Do sterowania wyprowadzeniami układu procesorowego używany jest sterownik PIN driver.
Najpierw trzeba dołączyć pliki nagłówkowe.
/* TI-RTOS Header files */
#include <ti/drivers/PIN.h>
#include <ti/drivers/pin/PINCC26XX.h>
* Pin driver handles */
static PIN_Handle pinHandle;
/* Global memory storage for a PIN_Config table */
static PIN_State pinState;
Potem trzeba zdefiniować strukturę, gdzie definiowane są wyprowadzenia: kierunek pracy, poziom logiczny, podciąganie oraz moc sterowania.
/*
* Initial pin configuration table
* - LEDs Board_LED0 & Board_LED1 are off after the pin table is initialized.
* - Button is set to input with pull-up. On SmartRF06, BUTTON0 is UP, for the
* others it’s the LEFT button.
*/
PIN_Config pinTable[] = {
Board_LED0 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
Board_LED1 | PIN_GPIO_OUTPUT_EN | PIN_GPIO_LOW | PIN_PUSHPULL | PIN_DRVSTR_MAX,
Board_BUTTON0 | PIN_INPUT_EN | PIN_PULLUP,
PIN_TERMINATE
};
W ramach funkcji main() należy najpierw inicjalizować wszystkie wyprowadzenia. A potem otworzyć wyprowadzenia używane w projekcie.
/* Call board init functions */
PIN_init(BoardGpioInitTable);
/* Open LED pins */
pinHandle = PIN_open(&pinState, pinTable);
if(!pinHandle) {
System_abort(„Error initializing board pinsn”);
}
Uzyskany uchwyt zostanie użyty do zmiany stanu wyprowadzeń w czasie pracy programu.
PIN_setOutputValue(pinHandle, Board_LED1, 1);
Kolejnym działaniem w projekcie jest utworzenie i uruchomienie zadania (workTask) systemu TI-RTOS. Wymaga to zdefiniowania struktury dostępu oraz stosu tego zadania.
Task_Struct workTask;
static uint8_t workTaskStack[256];
Dalej definiowana jest funkcja callback
Void workTaskFunc(UArg arg0, UArg arg1)
{
while (1) {
/* Do work */
doWork();
/* Wait a while, because doWork should be a periodic thing, not continuous.*/
CPUdelay(24e6);
}
}
W funkcji main() ustawiane są parametry zadania oraz jest ono tworzone przy użyciu wywołania funkcji Task_construct.
/* Set up the led task */
Task_Params workTaskParams;
Task_Params_init(&workTaskParams);
workTaskParams.stackSize = 256;
workTaskParams.priority = 2;
workTaskParams.stack = &workTaskStack;
Task_construct(&workTask, workTaskFunc, &workTaskParams, NULL);
Definiowane jest tylko jedno zadanie system operacyjnego TI-RTOS z funkcją workTaskFunc jako ciało zadania. Jest to pętla nieskończona, która realizuje przełączanie stanu diody LED (w funkcji doWork) oraz opóźnienie czasowe.
void doWork(void)
{
PIN_setOutputValue(pinHandle, Board_LED1, 1);
FakeBlockingSlowWork();
PIN_setOutputValue(pinHandle, Board_LED1, 0);
}
Wywołanie na końcu funkcji main() funkcji BIOS_start powoduje uruchomienie działania systemu operacyjnego TI-RTOS. Sterowanie nie wraca już do funkcji main().
Ostatnią linią kodu w funkcji main() jest polecenie powrotu return (0);. Jest ono dodane po to, aby w przypadku niepowodzenia wywołania funkcji BIOS_start program nie „poszedł w maliny”. Przy dosyć skomplikowanej strukturze projektu taki scenariusz jest możliwy.
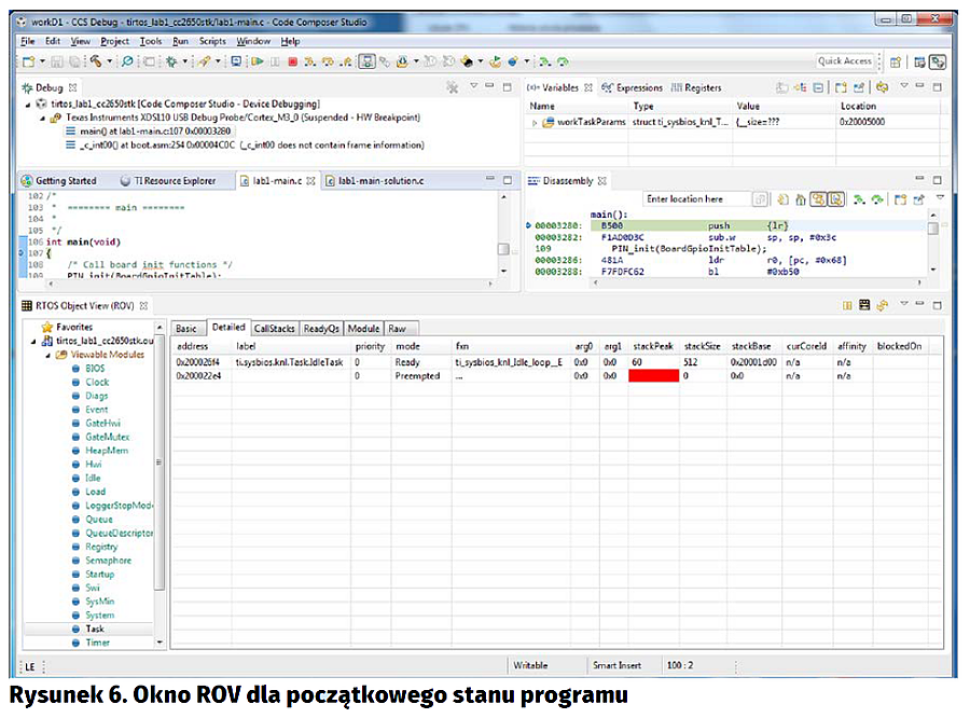
Okno RTOS Object View (lub w skrócie ROV) pozwala na wgląd w stan obiektów systemu TI-RTOS [17]. Informacja jest aktualizowana poprzez łącze JTAG po zatrzymaniu pracy procesora.
Otwórz ROV z menu Tools -> RTOS Object View (ROV).
Otwierana jest tabelka z informacją o obiektach systemu TI-RTOS.
Zamknij okno Console. W zakładce RTOS Object View (ROV) rozwiń drzewo tirtos_lab1_cc2650stk.out. Wybierz pozycję Task i otwórz zakładkę Detailed (rysunek 6).
W oknie można zobaczyć, które zadanie jest aktualnie wykonywane (Running), które jest zablokowane (Blocked), a które jest gotowe (Ready).

Uruchom program tirtos_lab1_cc2650stk
Na pasku narzędzi perspektywy CCS Debug kliknij na przycisk Resume .
Program zaczyna pracować. Dioda LED1 (czerwona) zestawu CC2650STK SensorTag zapala się na 1 sekundę z 1- jednosekundową przerwą.
Po pięciokrotnym zaświeceniu diody LED kliknij na przycisk Suspend (Halt/Pause). Spowoduje to zatrzymanie działania programu.
Zobacz stan okna RTOS Object View (ROV) – rysunek 7.
W oknie można zobaczyć, że zadanie workTaskFunc jest aktualnie wykonywane (Running), maksymalny rozmiar stosu wynosi 112 przy wielkości stosu (256). Czyli nie ma obaw o wystąpienie przepełnienia stosu.
Execution graph
Okno Execution graph pokazuje informacje o stanie systemu TI-RTOS podczas pracy [14].
Z menu wybierz Tools ? RTOS Analyzer -> Execution Analysis.
W oknie Analysis Configuration zaznacz tylko Execution Graph, pozostaw resztę ustawień bez zmian i naciśnij przycisk Start.
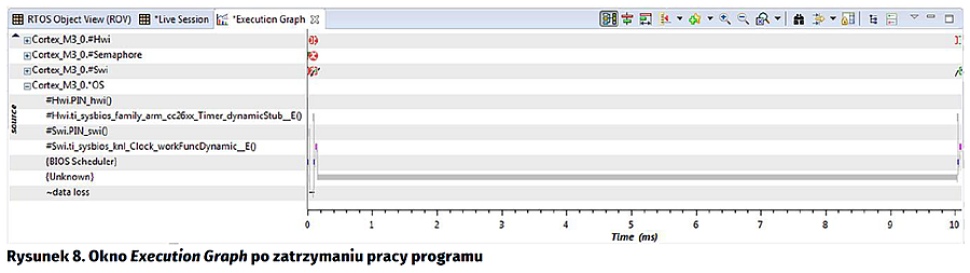
W nowym oknie zakładki Execution Graph rozwiń widoczność wątków Cortex_M3_0.*OS (rysunek 8).
Jest tylko jedno aktywne zadanie workTaskFunc. Jak można zobaczyć w zakładce Live Session, zostało ono zaliczone do klasy zdarzeń o nazwie Unknown. Zadanie tła nie jest nigdy uaktywniane podczas pracy programu. Oznacza to, że jedno zadanie zawłaszcza cały czas procesora. Brak wyświetlania stanu zadania workTaskFunc jest sytuacją raczej błędną. Poprzednia wersja środowiska i systemu TI-RTOS go pokazywała.
Śpij dobrze
System TI-RTOS umożliwia zawieszenie działania zadania na określony czas. Służy do tego funkcja Task_sleep(numTicks [tick]). Blokuje ona działanie zadania na określoną liczbę okresów zegara RTOS (tick).
Aby uzyskać taki efekt, zostanie zamieniona funkcja CPUdelay na funkcję Task_sleep z czasem 1000 ms (1e6 mikrosekund).
Przejdź do perspektywy CCS Edit.
Otwórz plik lab1-main-solution.c. Dwukliknij na linię z jego nazwą.
Skopiuj linie 109-110.
/* Sleep */
Task_sleep(1000 * (1000 / Clock_tickPeriod));
Otwórz plik lab1.c.
Znajdź linie 97-98

CPUdelay(24e6);
Zamień linie 97–98 na nową skopiowaną zawartość.
Skopiuj linię 45 z pliku lab1-main-solution.c.
#include <ti/sysbios/knl/Clock.h>
Wstaw ją do pliku lab1.c po linii 44 jako nową linię 45.
#include <ti/sysbios/knl/Task.h>
#include <ti/sysbios/knl/Clock.h>
Wykonaj budowanie projektu. Użyj przycisku Build . Nie używaj przycisku Debug.
W oknie Reload… klikniej Yes, aby załadować (zaprogramować) nowy kod wynikowy do procesora.
Czekaj, aż kursor w oknie edycji lab1-main.c zostanie umieszczony w pierwszej linii funkcji main().
Przejdź do perspektywy CCS Debug.
Na pasku narzędzi perspektywy CCS Debug kliknij na przycisk Resume .
Zobacz stan okna RTOS Object View (ROV) (rysunek 9).
Zadanie workTaskFunc jest zablokowane przez polecenie Task_sleep.
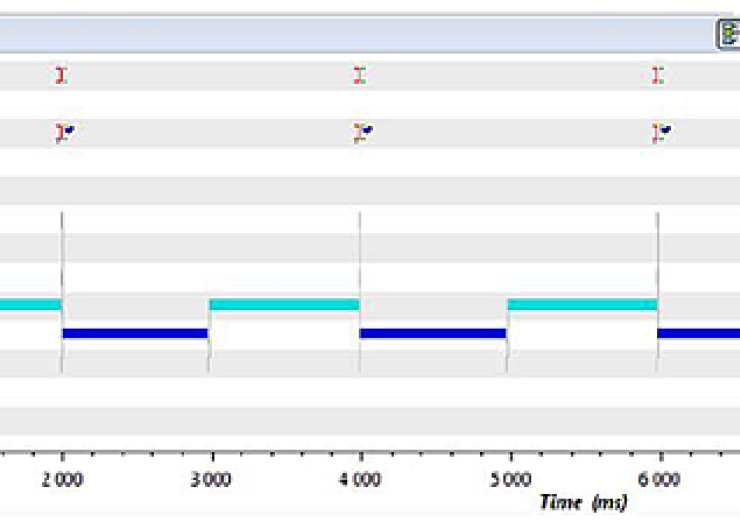
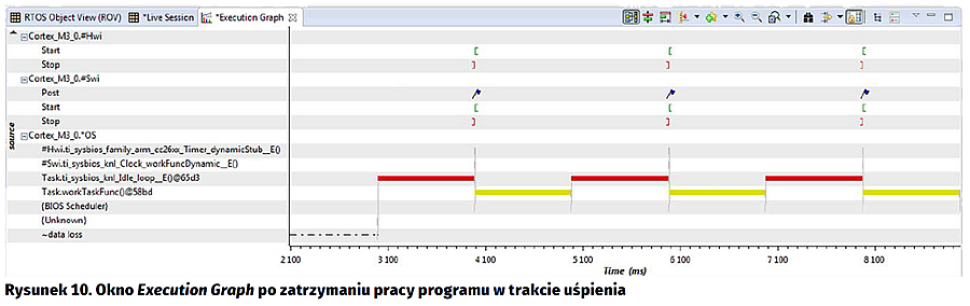
Zobacz wykres w oknie zakładki Execution Graph (rysunek 10).
Aby zmienić skalę czasową wykresu, kliknij na pole opisu (Time) i pokręć kółkiem myszki.
W oknie wyraźnie widać naprzemienną pracę zadania workTaskFunc oraz systemowego zadania tła.
Przerwania sprzętowe. Nawiasy [ oraz ] oznaczają początek i koniec pracy wątku. Jeśli wystąpi utrata danych, wtedy pokazywana jest ikonka.
Przerwania programowe. Ikonka informuje, że wątek został aktywowany (post). Nawiasy [ oraz ] oznaczają początek i koniec pracy wątku.
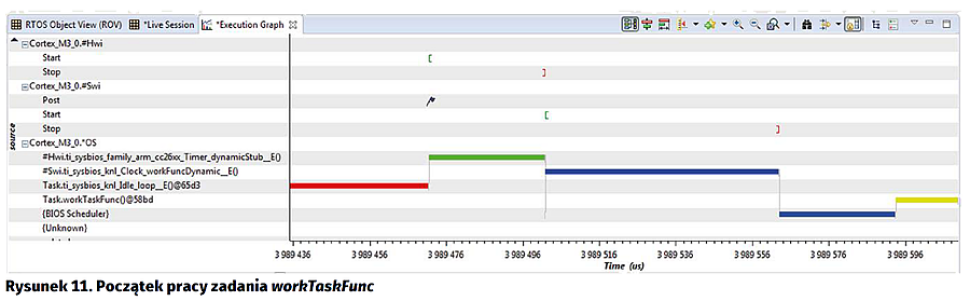
W oknie zakładki Execution Graph rozciągnij wykres w okolicach przełączania z systemowego zadania tła do zadania workTaskFunc (rysunek 11).
Zakończenie zliczania czasu uśpienia powoduje zgłoszenie przerwania sprzętowego. Wątek przerwania sprzętowego aktywuje funkcję zegara. Po jego zakończeniu startuje praca wątka przerwania programowego (zegarowego) i następnie sterowanie jest przekazywane do programu szeregującego zadania (scheduler). Zadanie workTaskFunc jest gotowe i zostaje uruchomione.
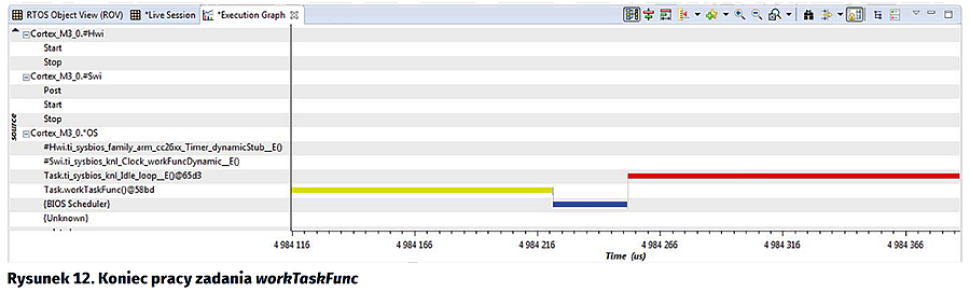
W oknie zakładki Execution Graph rozciągnij wykres w okolicach przełączania z systemowego zadania workTaskFunc do zadania tła (rysunek 12).
Zadanie workTaskFunc po wywołaniu funkcji Task_sleep zostaje zablokowane i program szeregujący zadania uruchamia zadanie tła.
W następnym odcinku spróbujemy jeszcze bardziej poprawić pracę programu.
Henryk A. Kowalski
Literatura:
[1] Systemy dla Internetu Rzeczy (1): Zestaw CC2650 SensorTag, „Elektronika Praktyczna”, 12/2016
[2] Systemy dla Internetu Rzeczy (2): Użytkowanie zestawu CC2650 SensorTag, „Elektronika Praktyczna”, 1/2017
[3] Systemy dla Internetu Rzeczy (3): Użytkowanie zestawu CC2650 SensorTag, „Elektronika Praktyczna”, 2/2017
[4] Systemy dla Internetu Rzeczy (4): Zestaw CC1310 LaunchPad, „Elektronika Praktyczna”, 3/2017
[5] TI-RTOS: Real-Time Operating System (RTOS) for Microcontrollers (MCU) https://goo.gl/1nU5Ua
[6] BLE-STACK V2.2.1 (Support for CC2640/CC2650) v2.2.1, 28-OCT-2016 https://goo.gl/84HQNI
[7] TI-RTOS 2.20 for CC13xx/CC26xx SimpleLink Getting Started Guide (SPRUHU7D.pdf), 17 Jun 2016 https://goo.gl/5VksQk
[8] SYS/BIOS (TI-RTOS Kernel) v6.46 User’s Guide (SPRUEX3Q.pdf), 16 Jun 2016 https://goo.gl/3cbzBR
[9] CC2640/CC2650 Bluetooth low energy Software Developer’s Guide (SWRU393D.pdf) 15 October 201 https://goo.gl/J4499t
[10] TI-RTOS 2.20 User’s Guide (SPRUHD4M.pdf), 17 Jun 2016 https://goo.gl/L8tOFo
[11] CC2640/CC2650 Getting Started and FAQ, 2016 Oct 31 https://goo.gl/lBTXOI
[12] TI-RTOS (TI WIKI) https://goo.gl/Luh1oW
[13] Category:SYSBIOS (TI WIKI) https://goo.gl/L08fy9
[14] System Analyzer User’s Guide (SPRUH43.pdf) (ver.F March 2014) https://goo.gl/dCXuHg
[15] SimpleLink Academy (v1.11 – November 4th 2016) https://goo.gl/ez4FjV
[16] How applications boot, run, and shutdown, The Eclipse Foundation, 2008 https://goo.gl/lDR4FF
[17] Runtime Object Viewer, Using ROV for Eclipse-Based Debugging https://goo.gl/Cg69ek












