 Zaloguj
Zaloguj




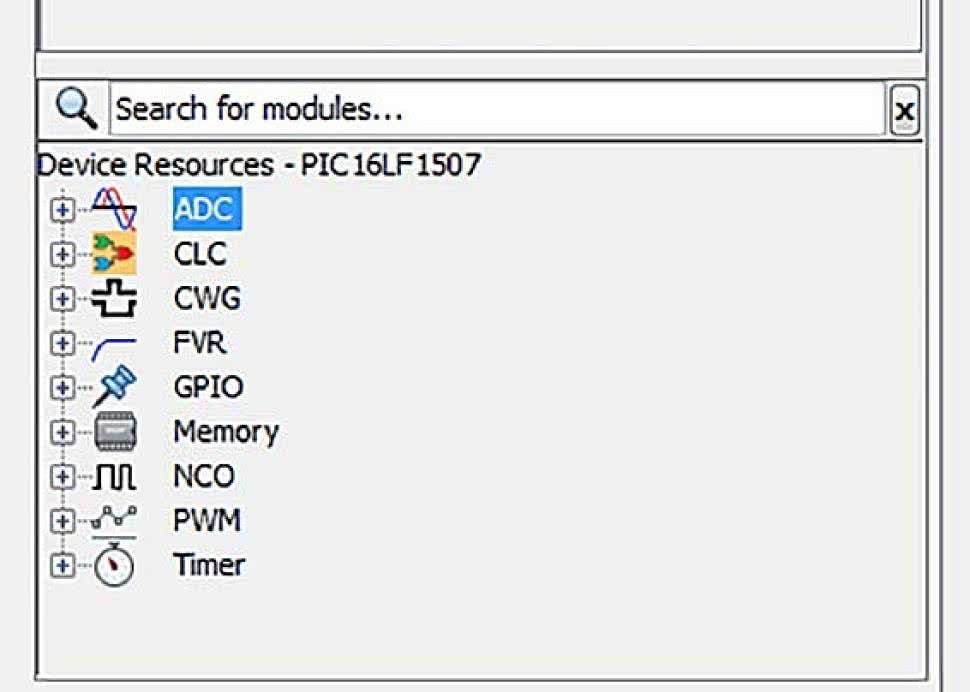
Rysunek 1. Okno Device Resources wtyczki Code Configurator
Współcześnie, nawet jeśli ktoś chce zbudować urządzenie o skromniejszych możliwościach, to i do niego wkłada okrojoną, 32-bitową jednostkę z mniejszą pamięcią, uboższymi peryferiami i za relatywnie niższą cenę. Z jednej strony to dobrze, bo raz poznane architektura i narzędzia można stosować w wielu aplikacjach.
Jednak z drugiej strony, wykreowany brak alternatyw na zmonopolizowanym rynku może wywołać stagnację. Microchip - firma z olbrzymim potencjałem, która od zawsze szła swoja drogą, czasami pod prąd ogólnym tendencjom, wymyśliła sposób na drugą młodość 8-bitowych mikrokontrolerów rodziny PIC16F.
Pomysł był tak prosty, jak to tylko możliwe: bierzemy sprawdzony rdzeń i dodajemy specjalne, zaawansowane układy peryferyjne. Pierwsze pytanie jakie się nasuwa: to jakie to są te zaawansowane układy peryferyjne, że konstruktor rozważy wykorzystanie staruszka PIC16F zamiast na przykład nowoczesnego Cortexa M? Przyjrzyjmy się im.
PIC16LF1507 i MPLAB X Code Configurator.
Rysunek 2. Układ taktowania PIC16LF1507
Nic tak dobrze nie ilustruje działania mikrokontrolera i jego układów peryferyjnych jak konkretne przykłady. Dlatego postanowiłem początkowo wykorzystać będący w moim posiadaniu mikrokontroler PIC16LF1507.
Układ procesorowy PIC16LF1507 został zbudowany zgodnie z wyżej przedstawiona ideą: do rdzenia PIC16F dołączono kilka bardzo interesujących układów peryferyjnych, które to trudno znaleźć w układach innych producentów. Mikrokontroler został umieszczony w podstawce na małej, uniwersalnej płytce drukowanej.
Oprócz podstawki na płytce zamontowałem złącze dla programatora-debuggera PICKit3 i całość zasiliłem napięciem +3,3 V. Większość mikrokontrolerów PIC16LF może być zasilana napięciem +5 V. Niestety - PIC16LF jest wyjątkiem, ponieważ jego maksymalne napięcie zasilające wynosi +4 V. Ten układ najlepiej zasilić napięciem +3,3 V, bo przy +5 V może ule uszkodzeniu.
Do testów wykorzystamy bezpłatne środowisko projektowe MPLAB X IDE (v3.05) oraz kompilator C MPLAB XC8 w wersji bezpłatnej (bez optymalizacji kodu). Do programowania pamięci użyjemy firmowego PICkit3.
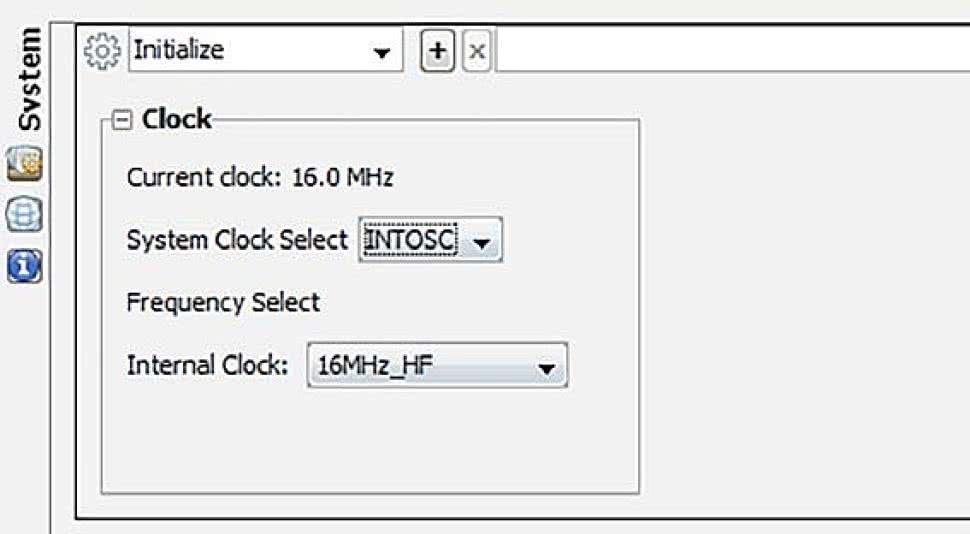
Rysunek 3. Konfiguracja układu taktowania
Pakiet IDE MPLAB X ma możliwość uruchamiania wtyczek (plug-in). Jedną z takich wtyczek jest firmowy MPALB Code Configurator. To program narzędziowy, który bardzo ułatwia życie programistom PICów. Jak wiadomo, układy peryferyjne są konfigurowane i sterowane przez zapisywanie i odczytywanie rejestrów konfiguracyjnych umieszczonych w przestrzenia pamięci RAM.
Im bardziej rozbudowany układ, tym więcej rejestrów. A więcej rejestrów oznacza więcej wysiłku potrzebnego do ich prawidłowego zaprogramowania. Programowanie rejestrów konfiguracyjnych to żmudna i niezbyt lubiana praca, ale od jej poprawnego wykonania zależy działanie aplikacji.
Code Configurator znakomicie pomaga w kompletnym skonfigurowaniu układów peryferyjnych mikrokontrolera. Oczywiście skonfigurowany układ trzeba potem programowo obsługiwać, ale to już zadanie dla programisty.
W pierwszym przykładzie użyjmy Code Configuratora do skonfigurowania układu taktowania i zaprogramowania bezpieczników (fuse). Narzędzie uruchamiamy z okna Tools → Embeded (oczywiście, wcześniej musi być ono pobrane i zainstalowane). Po uruchomieniu, z lewej strony ekranu MPLAB X IDE zostanie wyświetlone okno MPLAB Code Configurator Resources podzielone na 2 części (rysunek 1):
- Device Resources - PIC16LF1507.
- Project Resources.
W oknie Device Resources jest umieszczona lista symboli graficznych wszystkich układów peryferyjnych mikrokontrolera, a w oknie Project Resources układy peryferyjne wybrane z listy do konfigurowania.
Taktowanie mikrokontrolera
Listing 1. Konfigurowanie oscylatora
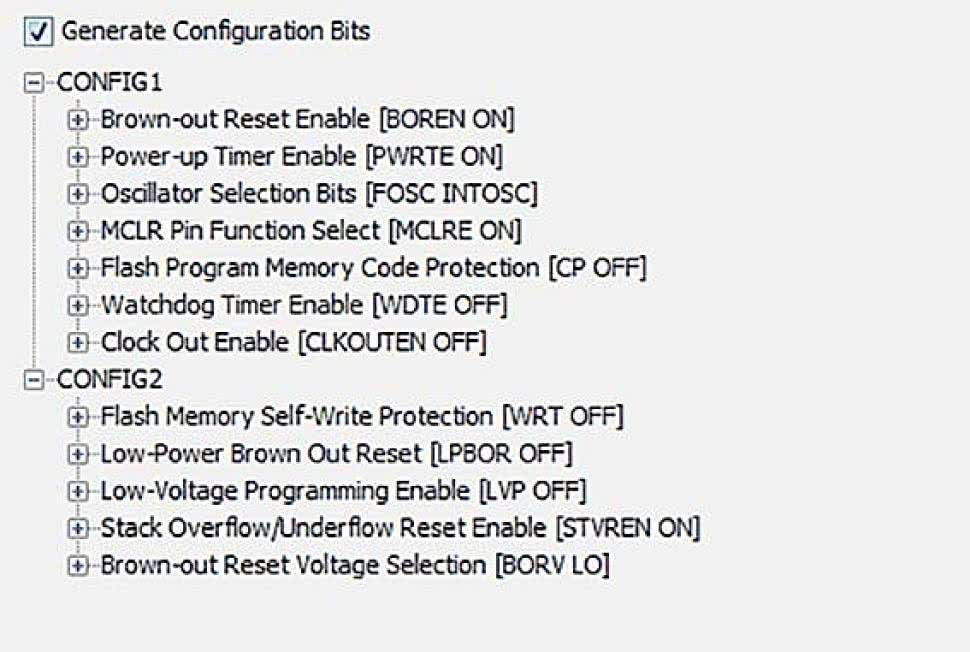
Taktowanie mikrokontrolera jest konfigurowane z zasobu System. Po kliknięci na ikonę system w okienku Project Resources zostaną wyświetlone okienka Clock do ustawiania źródła i częstotliwości taktowania oraz okno do konfigurowania bitów konfiguracyjnych mikrokontrolera Generate Configuration Bits (fuse).
W pierwszym kroku ustawiamy taktowanie mikrokontrolera. Standardowo CPU może być taktowane przez wewnętrzny oscylator RC lub przez zewnętrzny przebieg taktujący z osobnego oscylatora (rysunek 2). Co ciekawe, producent nie przewidział taktowania z wewnętrznego oscylatora kwarcowego.
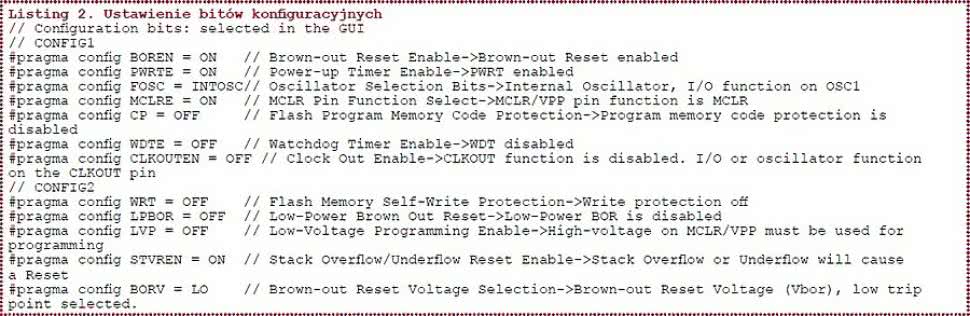
Listing 2. Ustawienie bitów konfiguracyjnych
Za to taktowanie z wewnętrznego HFINOSC oscylatora daje możliwość wyboru wielu częstotliwości z zakresu od 31 kHz do 16 MHz. Wybierzmy HFINTOSC i częstotliwość 16 MHz, jak pokazano na rysunku 3. Po kliknięciu na przycisk Generate Code Configurator wygeneruje funkcję inicjalizującą OSCILLATOR_Initialize() pokazaną na listingu 1.
Przy okazji ustawiania oscylatora skonfigurujemy bity w oknie Generate Configuration Bits. Z ważniejszych ustawiamy: PWRTE ON, MCLRE ON, WDTE OFF. Bity wyboru oscylatora FOSC INTOSC są automatycznie ustawiane lub zerowane przy konfigurowaniu okna Clock. Na podstawie ustawionych bitów MPLAB Code Configurator wygeneruje fragment programu pokazany na listingu 2.
Generator NCO
Rysunek 4. Bity konfiguracyjne
Przechodzimy teraz do pierwszego z zaawansowanych modułów peryferyjnych - generatora NCO. Moduł generatora NCO jest przeznaczony do użycia w aplikacjach, które wymagają generowania określonej, dokładnej częstotliwości. NCO pozwala również na precyzyjne regulowanie tej częstotliwości.
Częstotliwość przebiegu cyfrowego można łatwo dzielić używając do tego celu liczników. W typowym rozwiązaniu do zmiany częstotliwości wykorzystuję się liczniki. Moduł licznika jest podstawowym układem peryferyjnym i zawiera go każdy mikrokontroler, nawet najprostszy rodziny PIC10F. Standardowo, są to liczniki 8- lub 16-bitowe, wyposażone w preskalery i niekiedy w postskalery.
To czy uda nam się wygenerować założoną częstotliwość zależy od częstotliwości sygnału na wejściu i współczynnika podziału. Jeżeli wyliczony współczynnik podziału jest liczbą całkowitą, to można uzyskać dokładnie taką częstotliwość przebiegu, jakiej oczekujemy.

Rysunek 5. Schemat blokowy NCO
Problem pojawia się, kiedy potrzebujemy częstotliwości 130 kHz korzystając z kwarcu (generatora) 20 MHz. Wtedy 2000000/130000 w przybliżeniu 15,38461538. Po podzieleniu przez 15 otrzymujemy 1333333,3333 Hz. Takie proste dzielenie jest albo obarczone sporym błędem, albo wymaga dobierania częstotliwości wejściowej, tak by współczynnik podziału był całkowity.
Microchip w module NCO zastosował pomysłowe połączenie licznika z układem modyfikującym jego wartość w czasie każdego okresu zliczanego przebiegu. Żeby zapewnić odpowiednią rozdzielczość pomiaru licznik ma długość 20 bitów, a modyfikowana wartość jest 16-bitowa.
Na rysunku 6 pokazano schemat blokowy modułu NCO. Sygnał wejściowy jest wybierany selektorem programowanym bitami NxCKS. Można wybrać przebieg dostępny na wejściu NCOCLK, wyjścia wbudowanego układu logicznego (CLC) LC1OUT, zewnętrzny przebieg taktujący Fosc lub wewnętrzny oscylator HFINTOSC o maksymalnej częstotliwości 16 MHz.
Wybrany przebieg jest zliczany przez 20-bitowy licznik-akumulator. W czasie każdego narastającego zbocza sygnału wejściowego jest do niego dodawana 16-bitowa wartość zapisana przez użytkownika w rejestrze NCOxINCL.
Częstotliwość przepełniania się licznika- akumulatora wylicza się z równania
Rysunek 6. Przykład zliczania z dodawaniem 0x2000
gdzie:
NCO Clock Frequency: częstotliwość wejściowa.
Increment Value: wartość dodawana do akumulatora.
n: liczba bitów akumulatora, tu n=20.
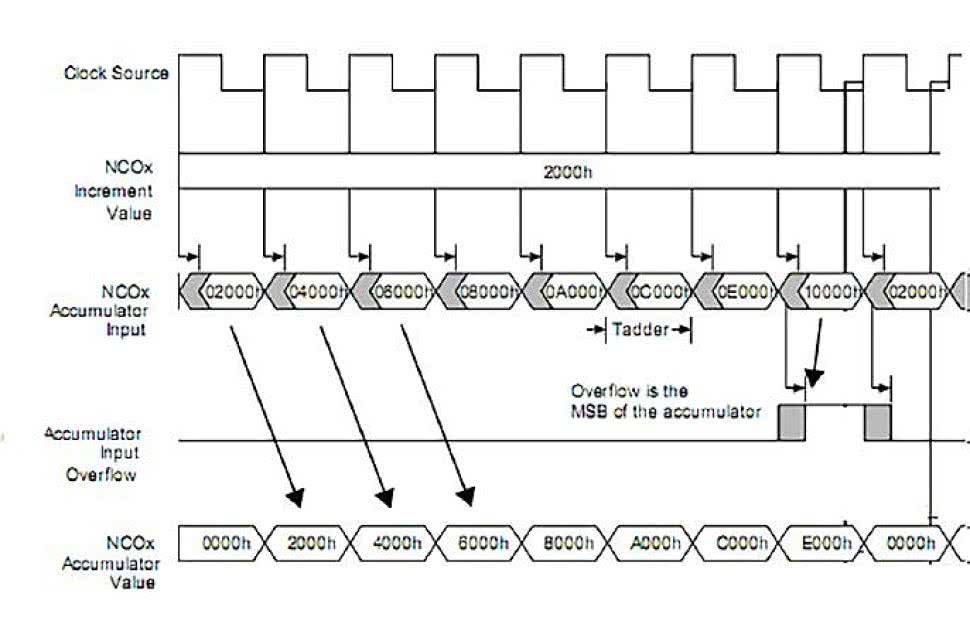
Na rysunku 7 pokazano przykład zliczania z dodawaniem wartości 0x2000 przy każdym narastającym zboczu przebiegu wejściowego. 20-bitowy licznik-akumulator przepełni się po 8 cyklach (okresach) przebiegu wejściowego. Wybierając kombinację częstotliwości wejściowej i zawartości rejestru NCOxINCL można precyzyjnie ustalić generowaną częstotliwość.
Przepełnienie licznika powoduje zmianę stanu przerzutnika D. Na jego wyjściu Q jest sygnał prostokątny o wypełnieniu 50% i częstotliwości równej połowie częstotliwości przepełnienia licznika. Zapisując bit NxPOL można zmieniać polaryzację sygnału wyjściowego.
Rysunek 7. Generowanie sygnału wyjściowego w trybie PF
Przez selektor wyjściowy jest on podawany na wyprowadzenie NCOx, ale jest też dostępny wewnętrznie dla bloków peryferyjnych CLC i CWG. Ten tryb pracy - wybierany wyzerowaniu bitu NxPFM - nazywa się Fixed Duty Cycle (FDC).
Każde przepełnienie licznika - akumulatora powoduje ustawienie znacznika przerwania NCOxIF. Jeżeli przerwanie nie jest zablokowane, to zostanie zgłoszone i musi być obsłużone.
Ustawienie bitu NxPFM wprowadza tryb Pulse Frequency Mode (PF). W tym trybie po każdym przepełnieniu się licznika-akumulatora wyjście NCOx jest ustawiane na czas równy zaprogramowanej wielokrotności okresu zliczanego sygnału wejściowego (zliczany przez ripple counter).
Rysunek 8. Inicjalizacja NCO
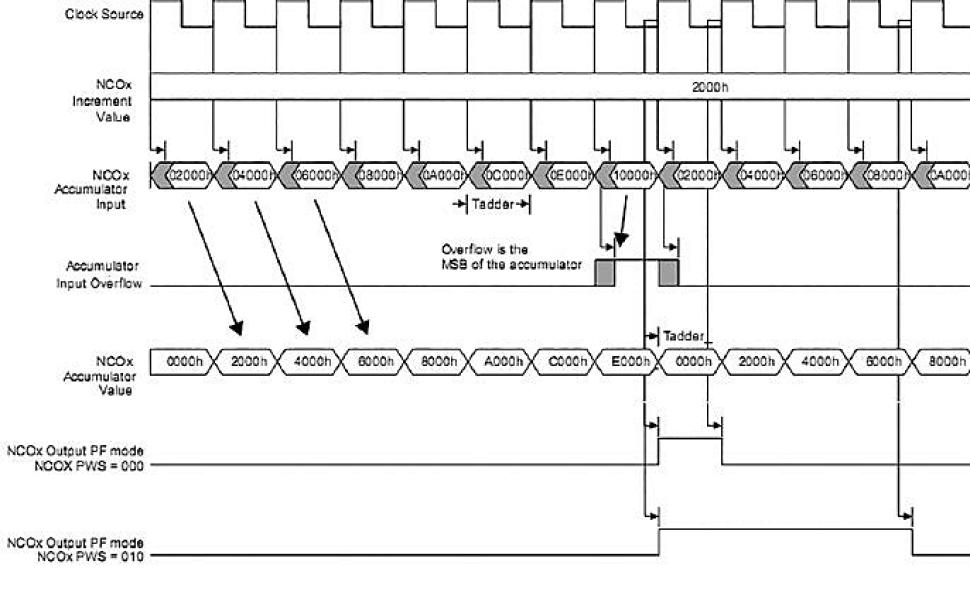
Czas trwania poziomu aktywnego (wysoki) i nieaktywnego (niski) zależy od bitu określającego polaryzację NxPOL i wartości wpisanej do bitów NxPWS rejestru konfiguracyjnego NCOxCON. Na rysunku 8 pokazano zależność czasu trwania stanu aktywnego dla NxPWS=0 i dla NxPWS=2. Podobnie jak w trybie FDC, sygnał wyjściowy może być podawany na wyjście NCOx przez selektor wyjściowy lub wewnętrznie do modułów CLC i CFG.
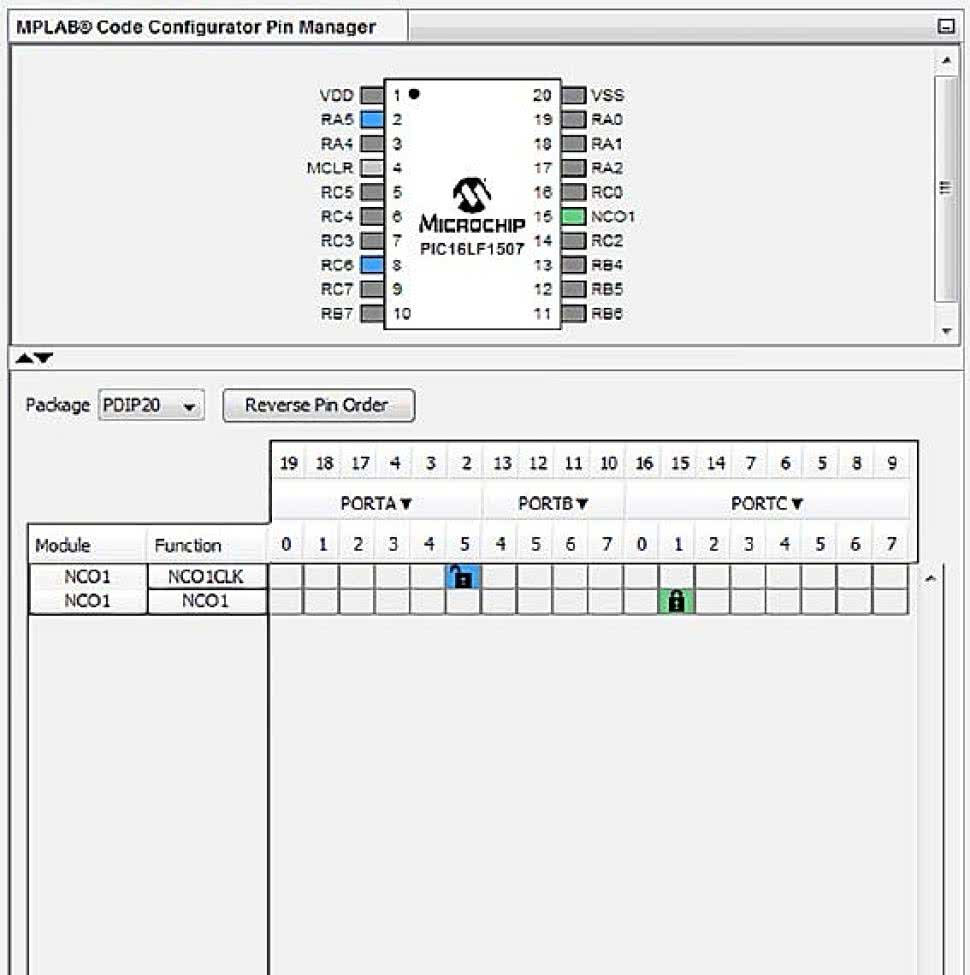
Rysunek 9. Przypisane wyjścia do NCO za pomocą Configurator Pin Manager’a
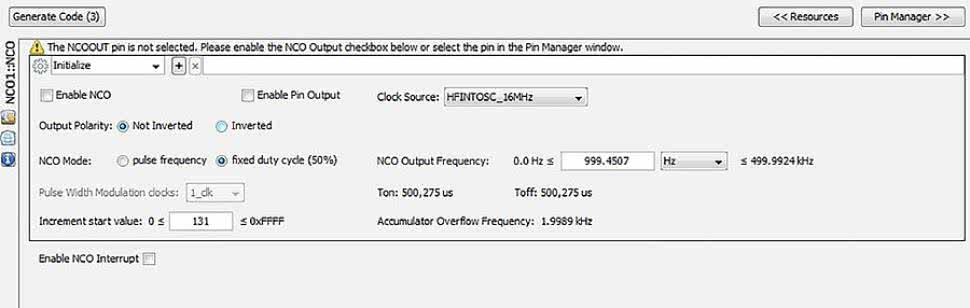
Programowanie NCO jest skomplikowane i wymaga sporo pracy. Lwią jej część może za nas wykonać MPLAB Code Configurator. Po kliknięciu w okienku Device Resources na ikonkę NCO jest ona automatycznie przenoszona do okienka Project Resources. Teraz w tym oknie klikamy na NCO i otwiera się okno inicjalizacji modułu pokazane na rysunku 9.
Przewidziano tu następujące ustawienia:
- Enable NCO. Zaznaczenia powoduje włączenie modułu.
- Enable Pin Out. Zaznaczenia umożliwia dołączenie sygnału z wyjścia NCO do wyprowadzenia mikrokontrolera.
- Clock Source. Wybór zegara taktującego moduł NCO. Można tu wybrać przebieg taktujący mikrokontroler (z wyjścia generatora HFINTOSC lub z wejścia zegara taktującego FOSC), z wyprowadzenia, na które zostanie podany zewnętrzny przebieg taktujący lub z wyjścia modułu Configurable Logic Cell CLC1 (CLC1 OUT). Tutaj wybieramy przebieg z wewnętrznego generatora RC o częstotliwości 16 MHz taktującego mikrokontroler.
- Output Polarity. Zanegowanie sygnału wyjściowego.
- NCO Mode. Wybór trybu Pulse Frequency (PF) lub Fixed Duty Cycle (FDC) - sygnał wyjściowy o wypełnieniu 50%. Po wyborze trybu PF w oknie Pulse Width Modulation Clocks ustala się czas trwania impulsu w cyklach zegarowych (1...128).
- NCO Output Frequency. W tym polu wpisuje się generowaną częstotliwość w Hz, kHz, lub MHz.
- Increment start value. Wartość wpisywana do rejestru NCO1INCL. Po zapisaniu wartości częstotliwości w oknie NCO Output Frequency, wartość okna Increment start value jest wyliczana automatycznie.
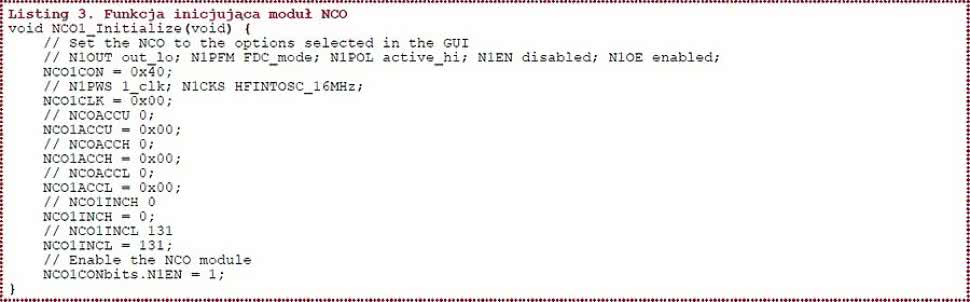
Listing 3. Funkcja inicjująca moduł NCO
Po kliknięciu na Generate Code MPLAB Code Confugurator generuje plik nco1.c z funkcją NCO1_Inicjalize() pokazaną na listingu 3. Skonfigurowany poprawnie moduł powinien generować przebieg prostokątny o częstotliwości 1 kHz.
Jeżeli w konfiguracji zostanie zaznaczona opcja Enable Output Pin, to sygnał wyjściowy z generatora będzie mógł być wyprowadzony na dedykowany pin mikrokontrolera. Aby to było możliwe, trzeba skonfigurować to wyprowadzanie jako wyjście NCO.
Rysunek 10. Przebieg PWM
MPLAB Code Configurator ma specjalne narzędzie do konfigurowania wyprowadzeń - Pin Manager. Po kliknięciu na przycisk Pin Manager w oknie Package trzeba wybrać obudowę mikrokontrolera i zostanie wyświetlony rysunek obudowy z zaznaczonymi na niebiesko wyprowadzeniami, które można przypisać do NCO.
Wyprowadzenie RA5 może być wejściem sygnału zegarowego, a jedno z wyprowadzeń RC6, lub RC1 wyjściem sygnału z NCO. Ponieważ ustawiliśmy zliczanie impulsów z HFINTOSC, to wejście NCO nie będzie konfigurowane. Wyjście konfigurujemy klikając prawym klawiszem myszki na wyprowadzenia RC1, lub RC6 (zależnie od potrzeb).
Po wybraniu na przykład RC1 i zatwierdzeniu kolor wyprowadzenia zmienia się z niebieskiego na zielony. Kolor zielony oznacza, że wyprowadzenie jest przypisane do modułu, a kolor niebieski, ze wyprowadzenie jest potencjalnie przeznaczone do modułu. - zostało to pokazane na rysunku 10.
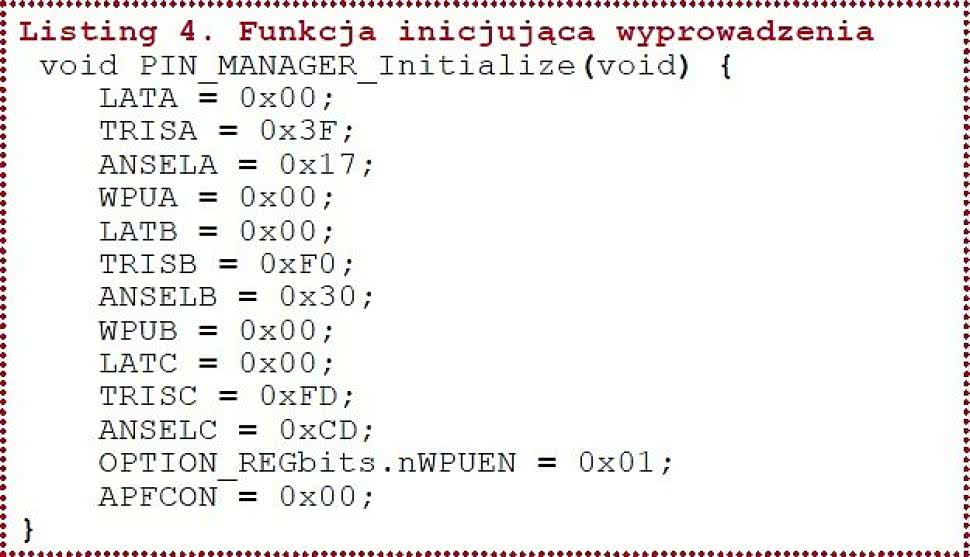
Listing 4. Funkcja inicjująca wyprowadzenia
Configurator Pin Manager generuje plik pin_manager.c z funkcją PIN_MANAGER_Initialize() pokazana na listingu 4. Działanie NCO ze skonfigurowanym wyjściem można przetestować w naszym układzie testowym. Program po skompilowaniu należy zapisać za pomocą PICKit3 w pamięci programu mikrokontrolera.
Jeżeli wszystko zostało wykonane prawidłowo, to na wyprowadzeniu RC1 powinien pojawić się sygnał prostokątny o wypełnieniu 50% i częstotliwości 1000 Hz. Można poeksperymentować z ustawieniami częstotliwości lub wprowadzić tryb PF i zobaczyć, jak zachowuje się układ. Nawet tak nieskomplikowany program można po odpowiednim rozbudowaniu wykorzystać do realizacji generatora przebiegu prostokątnego o precyzyjnie regulowanej częstotliwości.
W kolejnej części artykuły napiszę o innych, "zaskakujących" zastosowaniach NCO.
Tomasz Jabłoński, EP












