 Zaloguj
Zaloguj




Opis interfejsu jest zawarty m.in. w dokumencie [DS18B20]. Interfejs 1-Wire nie jest obsługiwany sprzętowo przez typowe mikrokontrolery. Producent układów publikuje noty aplikacyjne zawierające opis programowej implementacji protokołu 1-Wire [AN126] oraz realizację protokołu przy użyciu interfejsu UART [APP214].
Na najniższym poziomie - transmisji bitów - specyfikacja interfejsu definiuje trzy cykle: inicjowania (RESET), zapisu i odczytu. Każdy cykl jest poprzedzony nieaktywnym (wysokim) poziomem linii danych stanowiącym zakończenie poprzedniego cyklu i gwarantującym zgromadzenie w układach zasilanych z linii danych energii potrzebnej w czasie poziomu aktywnego (niskiego).
Cykl bitowy rozpoczyna się wyzerowaniem linii danych przez układ nadrzędny. Po czasie określonym w protokole transmisji następuje wyłączenie sterowania linii danych przez układ nadrzędny. Układ podrzędny może przetrzymać linię na poziomie niskim przez dodatkowy czas - w ten sposób nadaje on dane do układu nadrzędnego. Każdy cykl interfejsu jest charakteryzowany przez trzy podstawowe parametry czasowe:
- Czas impulsu startu - wyzerowania linii danych przez układ nadrzędny.
- Czas okna danych, w którym poziom linii danych niesie informacje o wartości bitu danych.
- Czas nieaktywny cyklu, po którym można rozpocząć następny cykl.
Cykl inicjowania charakteryzuje się dużo dłuższymi czasami charakterystycznymi od cykli transmisji danych. Uaktywnienie linii danych przez układ podrzędny podczas okna danych w cyklu inicjowania służy do zgłoszenia układowi nadrzędnemu obecności układu podrzędnego.
Typowa realizacja programowa układu nadrzędnego interfejsu 1-Wire polega na odczekiwaniu odcinków czasu protokołu i odpowiednich zmianach i próbkowaniu stanu linii danych. Podczas wymiany danych z układem podrzędnym mikrokontroler nadrzędny musi zapewnić odpowiednią dokładność odmierzania odcinków, co oznacza, że nie może on w tym czasie wykonywać żadnych innych czynności, w tym obsługiwać przerwań. Może to powodować gubienie zdarzeń lub opóźnienia w realizowanym algorytmie sterowania.
Program przykładowy
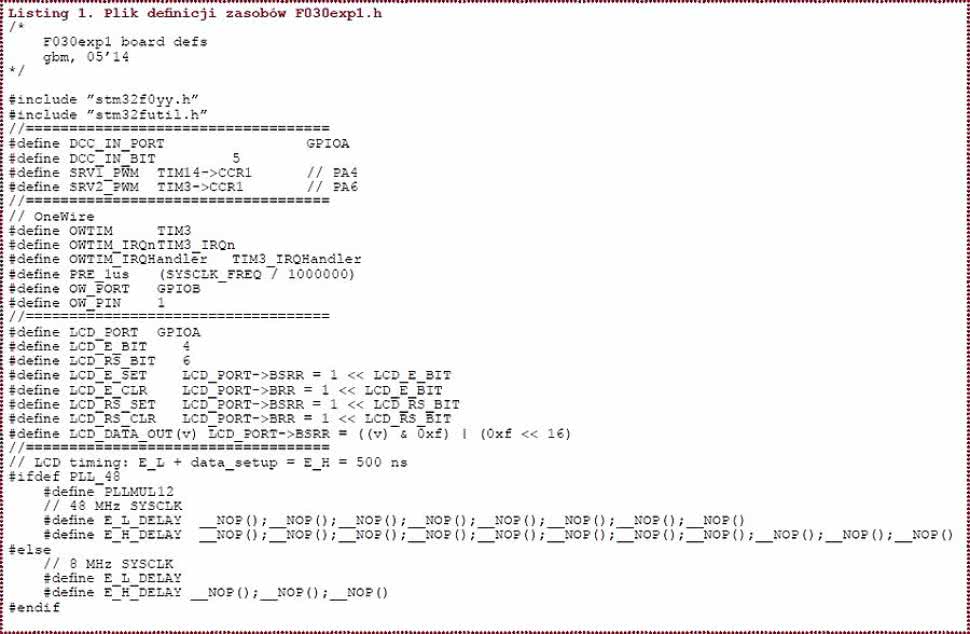
Listing 1. Plik definicji zasobów F030exp1.h
Prezentowany przykład ilustruje pozbawioną tych wad, nieblokującą obsługę interfejsu 1-Wire. Dzięki temu transmisje danych nie powodują blokowania procesora na czas ich wykonywania i mogą być one inicjowane z procedur obsługi przerwań.
Przedstawiona na listingu 1 implementacja 1-Wire bazuje na przerwaniach timera, a do jej realizacji jest potrzebny timer, który może równocześnie odmierzać trzy odcinki czasu, generując przerwania po każdym z nich. Cechę taką ma większość timerów mikrokontrolerów STM32F - te, które są wyposażone w rejestr końca cyklu ARR i przynajmniej dwa rejestry porównania CCRx, jak np. TIM1, TIM3 lub TIM15.
Przykładowy program zapewnia obsługę popularnego cyfrowego czujnika temperatury typu DS18B20. Program cyklicznie odczytuje identyfikator układu zawarty w jego pamięci stałej, inicjuje pomiar temperatury i odbiera wynik pomiaru. Dane odczytane z układu DS18B20 są wyświetlane na wyświetlaczu ciekłokrystalicznym. Czujnik temperatury może pracować z oddzielnym zasilaniem lub może być zasilany przez linię danych.
Program został napisany dla mikrokontrolera STM32F030, umieszczonego na opisanej wcześniej płytce eksperymentalnej STM32F030exp1. Do obsługi wyświetlacza LCD wykorzystano moduł opisany w jednym z poprzednich odcinków serii nt. programowania STM32F0, zapewniający nieblokujące inicjowanie wyświetlacza i aktualizację jego zawartości. Program można łatwo zaadaptować dla dowolnego innego mikrokontrolera serii STM32F i innej płytki, modyfikując inicjowanie portów i peryferiali i zmieniając definicje zasobów związanych z obsługą interfejsu 1-Wire, umieszczone w pliku nagłówkowym definiującym zasoby sprzętowe.
Inicjowanie mikrokontrolera
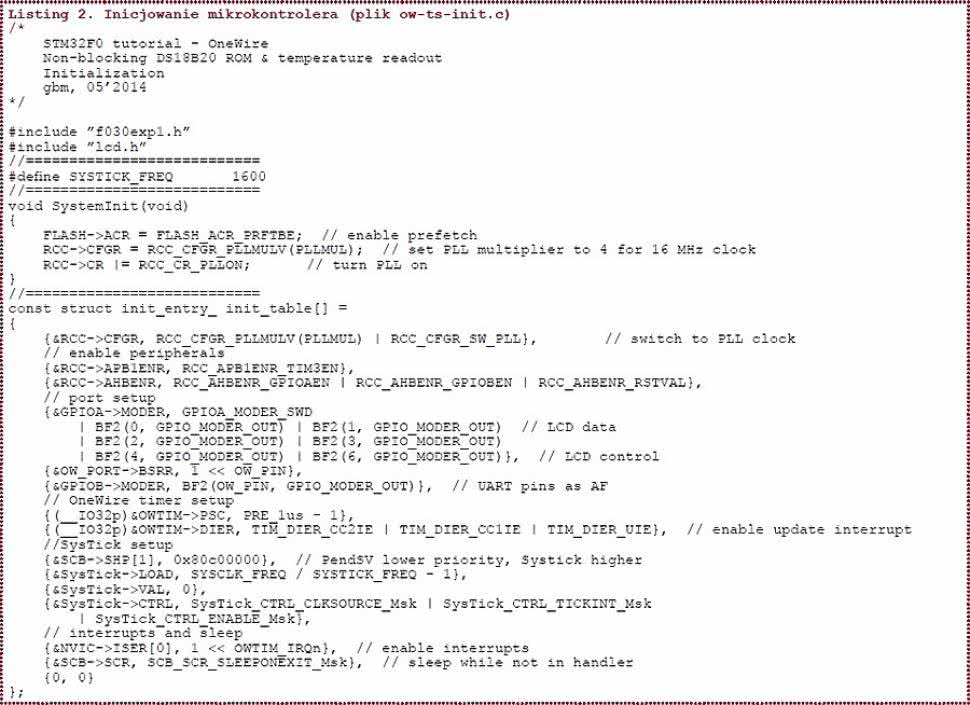
Listing 2. Inicjowanie mikrokontrolera (plik ow-ts-init.c)
W celu łatwej adaptacji kodu obsługi 1-Wire dla dowolnego timera, w pliku nagłówkowym definiującym zasoby sprzętowe płytki zdefiniowano trzy symbole, odpowiadające nazwie struktury timera, numerowi jego przerwania i nazwie procedury obsługi przerwania oraz symbole definiujące port i linię używane przez interfejs 1-Wire.
Ponieważ obsługa interfejsu 1-Wire wymaga szybkiej reakcji na przerwania, z czasami odpowiedzi na poziomie 1..2 ms, mikrokontroler musi pracować z odpowiednio dużą częstotliwością. W przykładowym programie użyto wewnętrznego generatora RC i modułu PLL, zaprogramowanego na częstotliwość 48 MHz. W programowaniu PLL (listing 2) biorą udział dwie procedury: SystemInit() i main() - technika ta została wyjaśniona w jednym z poprzednich odcinków serii. Procedura SystemInit i tablica inicjowania peryferiali zostały umieszczone w plik ow-ts-init.c. Do programowania timera została również zdefiniowana stała PRE_1us - wartość preskalera zegara timera odpowiadająca okresowi 1 µs.
Inicjowanie mikrokontrolera obejmuje:
- Włączenie timera i innych peryferiali w rejestrach sterowania zegarami bloku RCC.
- Zaprogramowanie portów GPIO do obsługi LCD i 1-Wire.
- Częściowe zaprogramowanie timera dla 1-Wire.
- Konfigurację priorytetów wywłaszczania przerwań.
- Ustawienie timera SysTick na zgłaszanie przerwań z częstotliwością 1600 Hz, potrzebną do obsługi LCD.
Początkowe zainicjowanie timera sprowadza się do ustawienia preskalera tak, aby przebieg wejściowy miał okres 1 µs oraz włączenia źródeł przerwań - na końcu okresu i przy osiągnięciu wartości rejestrów CCR1 i CCR2. Rejestr CCR1 będzie zawierał czas uaktywnienia linii danych przez mikrokontroler na początku cyklu. Rejestr CCR2 przy zapisie bitu służy do odmierzenia dodatkowego czasu aktywności linii dla bitu o wartości x, a w cyklach odczytu i inicjowania - do określenia momentu próbkowania stanu linii danych. Rejestr ARR zawiera czas trwania całego cyklu transmisji bitu.
Poprawna obsługa 1-Wire przy użyciu przerwań wymaga zagwarantowania, że nie wystąpią opóźnienia obsługi przerwania timera wynikające z obsługi innych wyjątków. Dlatego niezbędne jest obniżenie priorytetów wszystkich innych używanych w systemie przerwań z pozostawieniem przerwania timera używanego do obsługi 1-Wire jako jedynego o najwyższym priorytecie, w celu umożliwienia wywłaszczania innych przerwań przez przerwanie timera. W programie demonstracyjnym jedynym innym przerwaniem jest przerwanie timera SysTick, którego priorytet ustala się w rejestrze SCB->SHP[1]. Zostaje on obniżony z domyślnej wartości 0 do wartości 0x80 (w rdzeniach Cortex-M0 o priorytecie wyjątku decyduje wartość dwóch najbardziej znaczących bitów 8-bitowego pola priorytetu, a mniejsza wartość odpowiada wyższemu priorytetowi wywłaszczania).
Sterowanie linią danych 1-Wire
Głównym modułem programu zawierającym niskopoziomową obsługę interfejsu 1-Wire, jest plik owcore.c, który zawiera procedurę obsługi przerwania timera sterującego transmisją i potrzebne procedury pomocnicze.
Linia danych 1-Wire jest linią typu "otwarty dren". Jest ona zewnętrznie podciągnięta do dodatniego bieguna zasilania rezystorem o wartości 3,3...4,7 kV. W przypadku zasilania układu DS18B20 z linii danych jest jednak wymagane dodatkowe, aktywne wysterowanie linii w stan wysoki na czas pomiaru temperatury. Wysterowanie takie nie przeszkadza w poprawnej pracy układów z interfejsem 1-Wire w czasie, gdy nie są transmitowane dane. Przyjęto, że linia danych będzie ustawiana w tryb z "otwartym drenem" przy rozpoczynaniu transmisji danych, a po zakończeniu zapisu, po którym nie następuje odczyt (czyli np. po wydaniu polecenia pomiaru temperatury), będzie ona przełączana w tryb "push-pull" z aktywnym stanem wysokim. Dła ułatwienia zapisu operacji na linii danych w module owcore.c zdefiniowano następujące makra:
- OW_LOW - wyzerowanie linii.
- OW_HIGH - ustawienie linii.
- OW_OD - przełączenie linii w tryb "otwarty dren".
- OW_PP - przełączenie linii w tryb "push-pull".
Podczas początkowego inicjowania mikrokontrolera linia zostaje ustawiona do pracy w trybie "push-pull" na poziomie wysokim.
Obsługa przerwań timera 1-Wire
Timer sterujący transmisją na szynie 1-Wire jest włączany tylko na czas transmisji. Jest on zaprogramowany w tryb jednokrotny, a po każdym uruchomieniu odmierza trzy odcinki czasu, których długości zależą od realizowanej fazy protokołu 1-Wire. Po każdym okresie transmisji bitu, jeżeli transmisja ma być kontynuowana, timer zostaje ponownie uruchomiony.

Listing 3. Przykładowy program do obsługi 1-Wire z wykorzystaniem przerwań |
Obsługa przerwań została zrealizowana w konwencji automatu (listing 3). Początkowym stanem przy rozpoczęciu transmisji jest stan OWS_RESET, w którym jest generowany impuls inicjowania układów, a następnie sprawdzana ich odpowiedź w celu stwierdzenia, czy na szynie znajduje się jakiś układ. Po zakończeniu cyklu inicjowania następuje:
- Jeżeli nie wykryto odpowiedzi - zakończenie transakcji z błędem.
- Jeżeli wykryto odpowiedź - przejście do stanu zapisu danych - OWS_WRITE.
W stanie OWS_WRITE następuje transmisja bloku bajtów o długości określonej przez wartość zmiennej wr_len, rozpoczynającego się od adresu ustawionego w zmiennej wr_ptr. W stanie tym przerwania porównań z rejestrami CCRx timeera służą do zdeaktywowania linii danych, po czasie CCR1 przy transmisji zera i po czasie CCR2 przy transmisji jedynki. Okres timera odmierza okresy cykli transmisji bitów.
Po zakończeniu nadawania, jeżeli licznik odbioru rd_len ma wartość różną od zera, następuje przejście do stanu odbioru OWS_READ. W przeciwnym razie transmisja zostaje zakończona (stan OWS_IDLE).
W stanie OWS_READ dane są odbierane z szyny 1-Wire. Rejestr CCR1 timera określa czas impulsu rozpoczynającego cykl transmisji bitu,a rejestr CCR2 - moment próbkowania odbieranego bitu. Odbierane dane są zapisywane kolejno do bufora, którego adres przechowuje zmienna rd_ptr. Po odebraniu bloku następuje zakończenie transmisji i przejście do stanu OWS_IDLE. Opisany automat może zostać łatwo rozbudowany o kolejne stany, potrzebne do identyfikacji wielu układów dołączonych do szyny.
Interfejs pomiędzy niskopoziomową obsługą 1-Wire i innymi składnikami oprogramowania zapewniają publiczne zmienne typu _Bool:
- Zmienna ow_busy sygnalizująca trwanie transmisji.
- Zmienna ow_ok sygnalizująca poprawność wykonania zakończonej operacji.
Do inicjowania transakcji służy procedura owstart_wr_rd(), do której przekazywane są cztery argumenty - adresy i długości buforów danych, które mają być nadane i odebrane przez interfejs 1-Wire. Jeżeli transakcja składa się tylko z fazy zapisu - długość danych odbieranych ma wartość 0. Procedura inicjująca transakcję ustawia zmienną ow_busy, a zmienną ow_ok - zeruje. Zmienna ow_busy jest zerowana przez procedurę obsługi przerwania timera 1-Wire przy zakończeniu transakcji. Jednocześnie zmienna ow_ok ma nadawany poziom niski lub wysoki, stosownie do statusu zakończenia transakcji.
W module owcore.c zdefiniowano ponadto kilka procedur pomocniczych, które grupują akcje związane z inicjowaniem transakcji i zmianami faz protokołu. Procedury te ustawiają stan linii danych 1-Wire, programują odcinki czasu w rejestrach timera i uruchamiają timer.
Procedury użytkowe 1-Wire
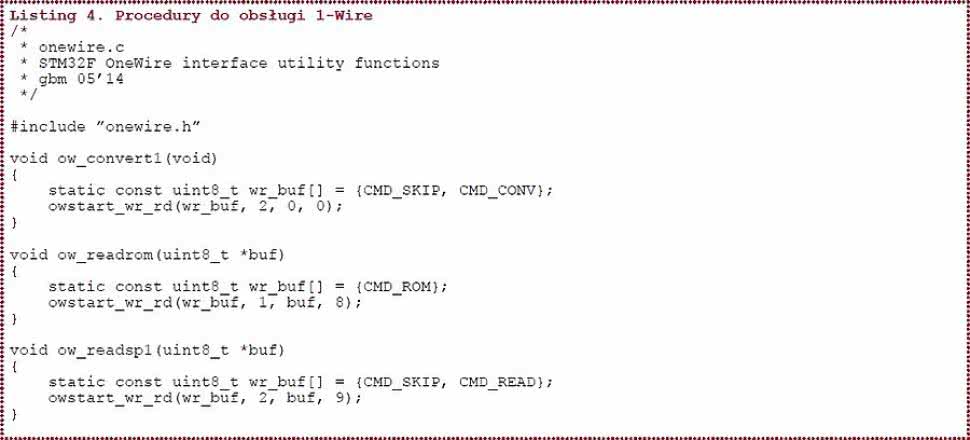
Listing 4. Procedury do obsługi 1-Wire
Moduł onewire.c zawiera zestaw procedur realizujących funkcjonalność interfejsu 1-Wire potrzebną w danej aplikacji - w naszym przypadku są to trzy procedury potrzebne do obsługi pojedynczego czujnika temperatury (listing 4):
- ow_readrom() inicjuje odczyt zawartości pamięci stałej układu.
- ow_convert1() inicjuje pomiar temperatury.
- ow_readsp1() inicjuje odczyt rejestrów zmiennych układu DS18B20, w tym wartości temperatury.
Procedury te są nieblokujące i służą jedynie do zainicjowania transakcji. Zakończenie transakcji jest sygnalizowane przez wyzerowanie zmiennej ow_busy.
Przerwanie SysTick
Przerwanie timera systemowego służy do realizacji głównej funkcjonalności programu. Jest ono zgłaszane z częstotliwością 1600 Hz. W każdym przerwaniu następuje wywołanie obsługi wyświetlacza LCD, a przy co szesnastym (z częstotliwością 100 Hz) jest sprawdzany stan zmiennej ow_busy; gdy nie trwa transakcja 1-Wire - następuje uruchomienie automatu sterującego obsługą czujnika temperatury.
Współpraca z układem DS18B20
Obsługa czujnika temperatury została również zrealizowana w konwencji automatu (listing 5), uruchamianego po zakończeniu transakcji 1-Wire i działającego w czterech stanach:
- Stan S_START inicjuje próbę odczytu identyfikatora układu, po czym następuje przejście do stanu S_ROM.
- W stanie S_ROM, jeżeli nie wykryto układu, następuje powrót do stanu S_START. Jeżeli dane zostały odczytane bez błędu - są one wyświetlane na wyświetlaczu, inicjowana jest transmisja polecenia pomiaru temperatury, uruchamiany jest programowy timer odmierzający czas konwersji i następuje przejście do stanu S_CONVERT.
- W stanie S_CONVERT po wyzerowaniu timera oczekiwania na zakończenie pomiaru jest inicjowany odczyt wyniku pomiaru i następuje przejście do stanu S_READ.
- W stanie S_READ, o ile nastąpił poprawny odbiór danych, zmierzona temperatura jest wyświetlana w dolnej linii wyświetlacza, po czym następuje przejście do stanu S_START
Do weryfikacji poprawności danych odczytanych z czujnika służy procedura obliczająca kod korekcyjny CRC8. Jego wartość powinna wynosić 0.

Listing 5. Obsługa czujnika DS18B20 |
Temperatura jest odczytywana z czujnika w kodzie U2, Wartość temperatury jest zapisana w stopniach Celsjusza w postaci stałopozycyjnej, z czterema bitami części ułamkowej. W celu wyświetlenia temperatury najpierw jest ona sprowadzana do postaci znak-moduł, następnie binarna część ułamkowa jesz zamieniana na reprezentującą ją jedną cyfrę dziesiętną, po czym zachodzi standardowa konwersja części całkowitej do postaci ciągu cyfr dziesiętnych. Znaki reprezentujące temperaturę są kolejno wpisywane do pamięci zawartości wyświetlacza.
Oprogramowanie umożliwia np. wygodne testowanie układów DS18B20 - w czasie pracy urządzenia można wyjąć układ z podstawki i włożyć inny, po czym można odczytać na wyświetlaczu jego identyfikator i aktualną wartość temperatury. Odczyt i wyświetlenie identyfikatora układu następuje praktycznie natychmiast po umieszczeniu czujnika w podstawce, a kolejne pomiary temperatury następują z okresem ok. 0,8 sekundy, wynikającym z parametrów czasowych czujnika.
Grzegorz Mazur
gbm@ii.pw.edu.pl
Bibliografia:
1. [DS18B20] DS18B20 Programmable Resolution 1-Wire Digital Thermometer, 2008, Maxim Integrated Products, Inc.
2. [AN126] APPLICATION NOTE 126, 1-Wire Communication Through Software, May 30, 2002, Maxim Integrated Products, Inc.
3. [AN162] APPLICATION NOTE 162, Interfacing the DS18X20/DS1822 1-Wire® Temperature Sensor in a Microcontroller Environment, Mar 08, 2002, Maxim Integrated Products, Inc.
4. [APP214] TUTORIAL 214, Using a UART to Implement a 1-Wire Bus Master, Sep 10, 2002, Maxim Integrated Products, Inc.












