 Zaloguj
Zaloguj



UART w STM32 - podstawowe wiadomości
Jeżeli kontroler pracujący w urządzeniu musi komunikować się z innymi urządzeniami np. komputerem PC, najwygodniej zrobić to wykorzystując jeden z przyjętych standardów komunikacyjnych. Interfejs szeregowy UART umożliwia dwukierunkową wymianę danych przesyłając dane kolejno, bit po bicie.
Skrót nazwy UART oznacza Universal Asynchronous Receiver-Transmitter, co po polsku oznacza uniwersalny asynchroniczny odbiornik-nadajnik. Jednak współczesne UARTy mają też inne tryby transmisyjne, więc ich nazwa uległa modyfikacji - dodano tryb pracy synchronicznej, więc nazwa UART zmieniła się w USART (Universal Synchronous-Asynchronous Receiver-Transmitter, co oznacza uniwersalny synchroniczny-asynchroniczny odbiornik-nadajnik).
Interfejs UART często jest utożsamiany z RS232, jednak trzeba pamiętać, że pomimo identycznej ramki danych, pracuje z wykorzystaniem napięcia o innych poziomach logicznych oraz, że o tym, że typowo w UART na próżno szukać sygnałów tzw. handshakingu, to jest RTS, CTS, DTR itd. Typowo USARTy mikrokontrolerów używają do transmisji danych jedynie trzech linii:
- TxD - linia danych wysyłanych. W urządzeniu współpracującym powinna być połączona z linią odbioru danych.
- RxD - linia odbieranych danych. W urządzeniu współpracującym powinna być połączona z linią transmisji danych.
- GND - linia masy, ustalająca poziom odniesienia dla połączonych urządzeń.
Co ciekawe, interfejs USART w mikrokontrolerach STM32 ma również wyprowadzone dwie linie służące do sprzętowej kontroli przepływu:
- CTS (Clear To Send) - wejście sygnału sygnalizującego gotowość urządzenia współpracującego do wysyłania danych. W urządzeniu współpracującym ta linia jest połączona z RTS (Ready To Send).
- RTS - wyjście sygnału sygnalizującego gotowość urządzenia do wysyłania danych do urządzenia współpracującego. Po drugiej stronie sygnał powinien być dołączony do linii CTS.
W mikrokontrolera STM32 sygnały interfejsu USART mają poziomy L=0 oraz H=3,3V. Po zastosowaniu prostych konwerterów można przekształcić wyjście USART w port RS232, a nawet przesyłać dane do komputera PC.
Zależnie od typu mikrokontrolera można wykorzystać dwa lub więcej portów USART. Procedury inicjacji każdego portu są identyczne. Kompletne zestawienie możliwości interfejsu USART mikrokontrolera znajduje się w dokumentacji technicznej CD00171190.pdf w paragrafie 27.2 "USART main features".
USART - ramka transmsji
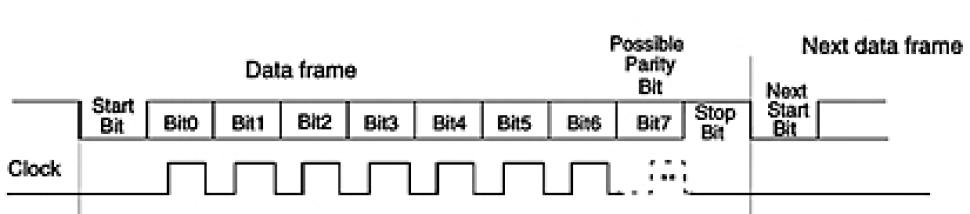
Rysunek 1. Budowa ramki transmitowanej za pomocą UART
Jak wynika z nazwy, transmisja za pomocą USART może być synchroniczna lub asynchroniczna. W pierwszym wypadku transmisja kolejnych bitów danych jest synchronizowana impulsami zegarowymi i jest potrzebna dodatkowa linia. W drugim wypadku linia zegarowa nie jest używana. Mikrokontrolery STM32 mogą obsługiwać oba rodzaje transmisji, choć nieporównanie częściej wykorzystuje się transmisję asynchroniczną.
Aby strona nadawcza i odbiorcza jednakowo interpretowały przesyłany sygnał, musi się to dziać zgodnie z ustalonymi regułami. Te reguły to budowa ramki zawierającej pojedynczy bajt i ustalona szybkość transmisji, co jest szczególnie ważne dla trybu asynchronicznego. Budowę pojedynczej ramki danych przesyłanej za pomocą USART pokazano na rysunku 1.
Każdą transmisję kolejnej ramki danych rozpoczyna bit startu, który zawsze ma poziom niski. Następnie przesyłane są kolejno bity danych począwszy od bitu najmłodszego (numer 0) do najstarszego. W mikrokontrolerze STM32 można wybrać transmisję z 8 lub 9 bitami danych.
Poziom wysoki oznacza transmisję logicznej "1" a poziom niski transmisję logicznego "0". Jeżeli będzie wykorzystywana kontrola parzystości, to informacja o parzystości lub jej braku będzie kodowana na pozycji najstarszego bitu danych. Ramkę kończy bit stopu, który ma zawsze poziom niski.
Przy transmisji synchronicznej na dodatkowej linii transmitowane są impulsy zegarowe synchronizujące odbiór danych. Przy transmisji asynchronicznej linia zegarowa jest niepotrzebna.
Szybkość transmisji

Tabela 1. Standardowe szybkości transmisji, które można zaprogramować w mikrokontrolerze
Szybkość transmisji określa czas trwania pojedynczego bitu, a w konsekwencji czas transmisji pojedycznej ramki danych. Interfejs w mikrokontrolerach STM32 umożliwia ustawienie dowolnej prędkości transmisji. Przyjęło się jednak używać standardowych wartości, co np. ułatwia procedury automatycznej detekcji transmisji. W tabeli 1 umieszczono niektóre standardowe szybkości możliwe do zaprogramowania w mikrokontrolerze:
W mikrokontrolerach STM32F wewnętrzne układy portu USART1 można taktować przebiegiem zegara systemowego o częstotliwości 72 MHz, a pozostałe częstotliwością o połowę mniejszą. Tabela zestawia nominalne standardowe szybkości transmisji z możliwymi do ustawienia najbliższymi im wartościami oraz wartość maksymalnego błędu wynikającego z różnicy pomiędzy prędkością uzyskaną, a wymaganą przez standard.
Pozostałe ustawiane parametry transmisji
Oprócz samej szybkości mikrokontrolery STM32F pozwalają na ustawienie kilku dodatkowych parametrów pracy USART:
- Liczby bitów danych (8 lub 9).
- Włączenie kontroli parzystości. Jest to prosty sposób kontroli poprawności przesłanych danych. W trybie "evenparity" bit parzystości jest, gdy liczba jedynek danych ramki jest nieparzysta. W trybie "oddparity" bit jest ustawiany, gdy liczba jedynek danych jest parzysta. Bit przesyłany jest na najstarszej pozycji.
- Czas trwania bitu stopu: 0,5, 1, 1,5 lub 2 okresy transmisji pojedynczego bitu danych.
Źródła przerwań
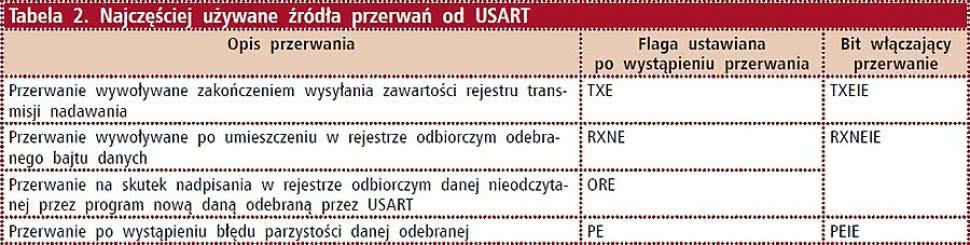
Tabela 2. Najczęściej używane źródła przerwań od USART
Interfejs USART może być źródłem kilku przerwań. Ich wykorzystanie pozwala na uwolnienie programu głównego od stałej, czasochłonnej kontroli stanu USART. Pozwala także na pracę w trybie wieloportowym. Najczęściej używane źródła przerwań od USART wymieniono w tabeli 2.
Biblioteczne funkcje obsługi USART-a
Biblioteka STM32F10x Standard Peripherals Firmware Library zawiera cały zestaw funkcji związanych z ustawieniem parametrów i obsługą interfejsów USART. W tym celu odnaleźć i kliknąć plik pomocy stm32f10x_ stdperiph_lib_um.chm. W polu wyszukiwania Index należy wpisać USART. Wykaz funkcji znajduje się w sekcji USART Exported Functions.
Obsługę interfejsu USART można zrealizować albo poprzez bezpośredni nadzór programu głównego nad transmisją i odbiorem pojedynczych bajtów w trybie tzw. polingu (odpytywania), albo wykorzystując system przerwań. Ponieważ drugi sposób jest zdecydowanie bardziej efektywny w opisie skupię się na obsłudze interfejsu szeregowego za pomocą przerwań z wykorzystaniem funkcji bibliotecznych.
Typowa inicjacja i obsługa dwustronnej transmisji asynchronicznej portem USART składa się z następujących kroków:
- Inicjacji linii portów pełniących funkcje TxD i RxD dla wybranego portu USART.
- Dołączenia wewnętrznego zegara do obwodów linii i interfejsu USART.
- Ustawienia parametrów interfejsu USART.
- Ustawienia bitu włączającego przerwanie odbioru (przerwanie nadawania powinno pozostać wyłączone).
- Utworzenia procedur obsługi przerwań.
- Włączenia kontrolera przerwań NVIC.
Gdy zachodzi potrzeba wysłania danych za pomocą USART, należy włączyć przerwanie nadawania. Procedura obsługi przerwań powinna automatycznie wyłączać przerwanie, gdy zakończone zostanie wysyłanie wszystkich bajtów.
Przykłady procedur portu USART
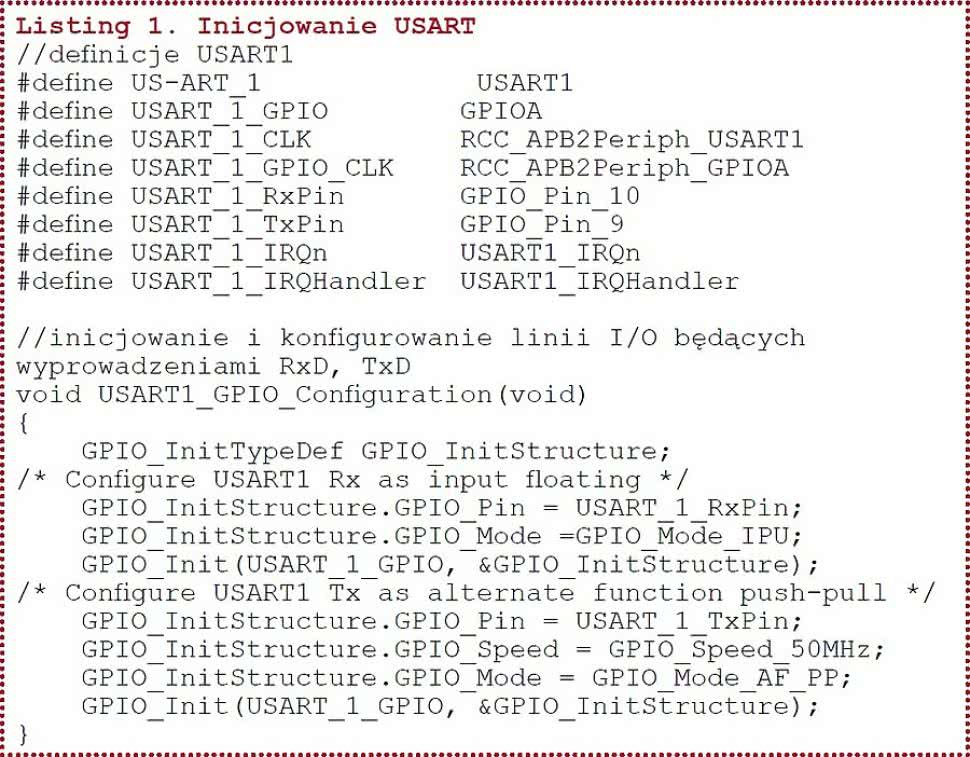
Listing 1. Inicjowanie USART
Procedura inicjowania portów mających pełnić funkcje wyprowadzeń RxD i TxD jest typowa. Oczywiście, na samym początku korzystając z dokumentacji lub opisywanego w poprzednim odcinku kursu programu narzędziowego STM32CubeMX należy określić, które linie mikrokontrolera pełnią funkcję wyprowadzeń RxD i TxD interfejsu USART, który chcemy uruchomić. Przykład będzie dotyczył USART1, którego standardowymi wyprowadzeniami są: RxD - PA.10, TxD - PA.9. W pliku nagłówkowym można wcześniej zadeklarować nazwy zmiennych określających te linie. Wszystko razem może wyglądać jak na listingu 1.
Następnie ustawiane są parametry portu. W tym wypadku port USART będzie mógł jednocześnie wysyłać i odbierać. Dane przesyłane będą w formacie 8-bitowym z 1 bitem stopu. Sprzętowa kontrola przepływu i kontrola parzystości są wyłączone. Na początku do układów USART procedura podłącza sygnały zegarowe. Na końcu włączane jest przerwanie odbioru (listing 2).
Jako parametr wywołania procedury należy podać szybkość transmisji, z którą ma pracować port USART np.
USART1_Inicjacja(9600); //port USART inicjowany do pracy z szybkością 9600
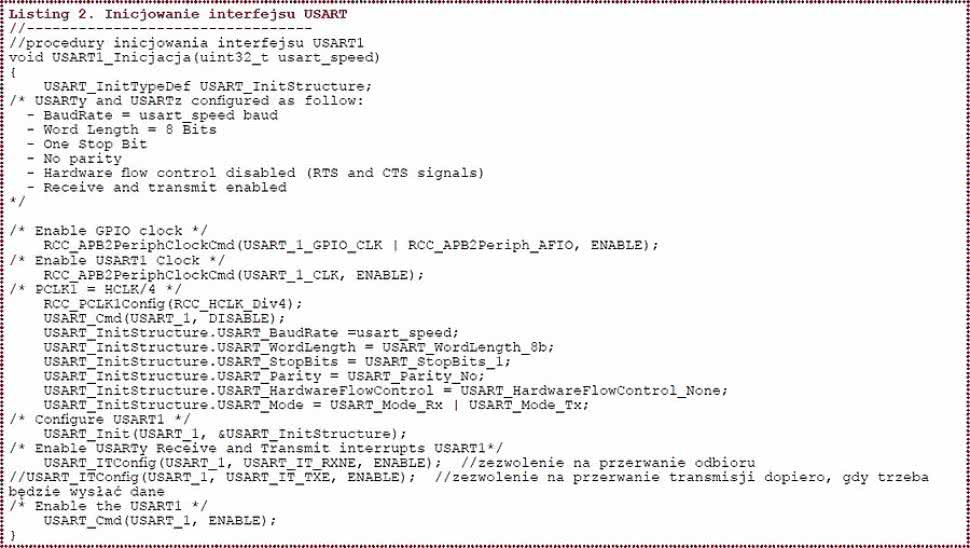
Listing 2. Inicjowanie interfejsu USART
Procedury obsługi przerwań nadawania i odbioru należy standardowo umieścić w pliku stm32f10x_it.c przeznaczonym do implementowania procedur obsługi wszystkich przerwań kontrolera. Szkielet procedury może wyglądać tak, jak na listingu 3.
Wszystkie przerwania USART1 obsługiwane są przez tą samą procedurę USART_1_IRQHandler. Dla identyfikacji źródła przerwania bada się ustawienia flag procedurą USART_GetITStatus.
Jeżeli jest ustawiona flaga USART_IT_RXNE oznacza to, że w rejestrze odbiorczym USARTA znajduje się odebrany nowy bajt. Zawartość rejestru odczytywana jest do zmiennej programu bufor_odbiorczy. Po zakończeniu przerwania program w pętli głównej będzie mógł się dalej zająć daną umieszczoną w buforze. Z powodów praktycznych bufor powinien być raczej wielobajtową tablicą a nie zmienną jak na przykładowym listingu.
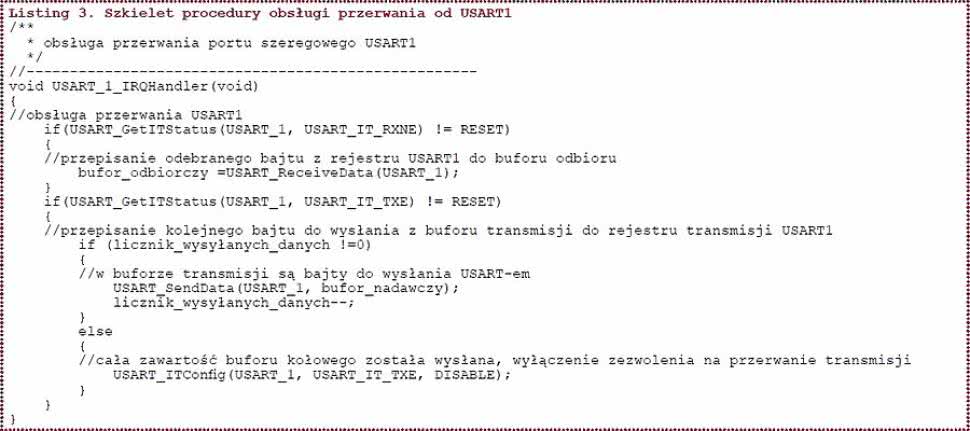
Listing 3. Szkielet procedury obsługi przerwania od USART1
Jeżeli jest ustawiona flaga USART_IT_TXE to oznacza, że zostało zakończone wysyłanie kolejnego bajtu za pomocą USART i rejestr nadawczy jest pusty. Zazwyczaj wysyła się więcej niż 1 bajt i należy przewidzieć zastosowanie w programie zmiennej licznik_wysylanych_danych.
Jeżeli stan zmiennej jest większy od zera z obszaru pamięci bufor_nadawczy należy pobrać kolejny bajt do wysłania i przy pomocy funkcji USART_Send_Data() umieścić go w rejestrze nadawania USART. Jeżeli nie ma już danych do wysłania powinno wyłączyć się przerwanie nadawania. W końcu należy włączyć kontroler kontrolera przerwań NVIC (listing 4).

Listing 4. Konfigurowanie NVIC do zgłaszania przerwania przy odbiorze bajtu z USART
Od tej chwili każdy odebrany bajt będzie wywoływał przerwanie w wyniku, którego zostanie umieszczony w buforze odbiorczym. Jeżeli zajdzie konieczność wysłania jakiejś liczby danych z buforu transmisji należy tylko włączyć przerwanie transmisji
USART_ITConfig(USART1, USART_IT_TXE, ENABLE); // enable TX interrupt
Na koniec kilka słów o ulepszeniu sposobu buforowania danych odbieranych i wysyłanych. Dobrym rozwiązaniem może być zastosowanie buforów kołowych.
Bufory kołowe
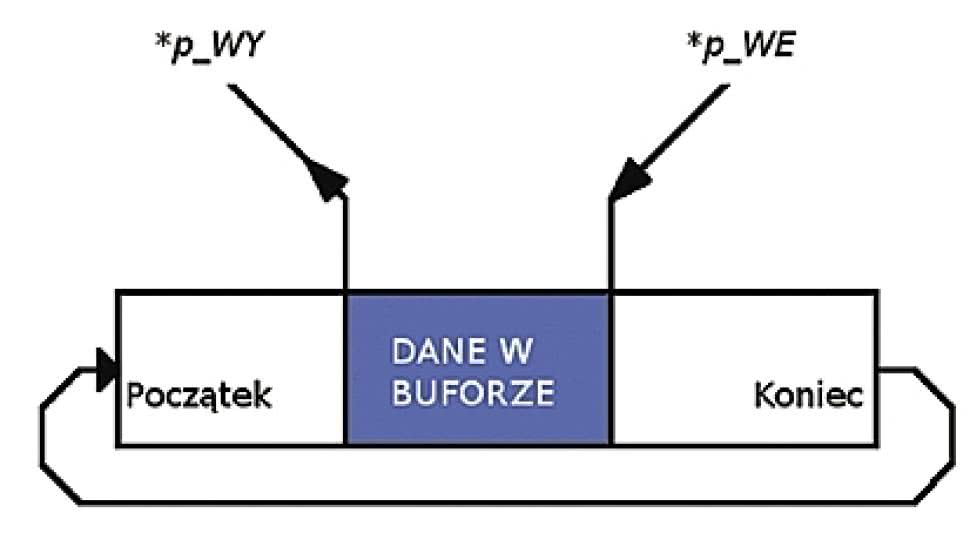
Rysunek 2. Zasada działania bufora kołowego
Zazwyczaj korzystając z UART przesyła się więcej niż 1 bajt. Dla uwolnienia programu głównego od konieczności ciągłej kontroli stanu rejestrów odbiorczego i nadawczego UART korzysta się z przerwań i buforów. Dane do wysłania zapisywane są w buforze nadawczym, z którego automatycznie pobierane są przez podprogram przerwania.
Z kolei dane odbierane przy pomocy przerwania automatycznie zapisywane są w buforze odbiorczym. Jeżeli rozmiar buforów jest odpowiednio duży program główny może zająć się przetwarzaniem zgromadzonych w nich danych w czasie pomiędzy obsługą innych zadań.
Buforem może być obszar pamięci zadeklarowany jako tablica. Kolejne dane będą zapisywane i odczytywane do tablicy przy pomocy zmiennej indeksującej. W wypadku takiego bufora programista musi zadbać, aby wartość kolejnego indeksu do odczytu a zwłaszcza do zapisu nie przekroczył maksymalnego rozmiaru tablicy. Zapis poza zadeklarowaną tablicą może doprowadzić do trudnych do przewidzenia efektów z załamaniem się programu włącznie.
Bufor kołowy jest sztuczką programistyczną pozwalającą uniknąć takiego niebezpieczeństwa. Zasadę działania bufora kołowego pokazano na rysunku 2.
Tak jak w przypadku normalnej tablicy dane do bufora są zapisywane i odczytywane począwszy od początku do końca. Najważniejsza różnica polega na tym, że po osiągnięciu końca zapis nowych bajtów danych kontynuowany jest od jego początku.
W przypadku odczytu z bufora sytuacja jest identyczna. Przy niewielkiej komplikacji konstrukcji programu unika się niebezpieczeństwa wyjścia poza zadeklarowany obszar. Niebezpieczeństwo nadpisania starych nieodczytanych danych nowymi jest łatwiejsze do opanowania i zazwyczaj nie grozi "załamaniem" programu.
Do obsługi bufora najwygodniej używać wskaźników. Za określenie pozycji danych do zapisu odpowiada wskaźnik *p_WE, dane do odczytu wskazuje wskaźnik *p_WY. Przed pierwszym użyciem bufora należy oba wskaźniki zainicjować wskazaniem na jego początek.
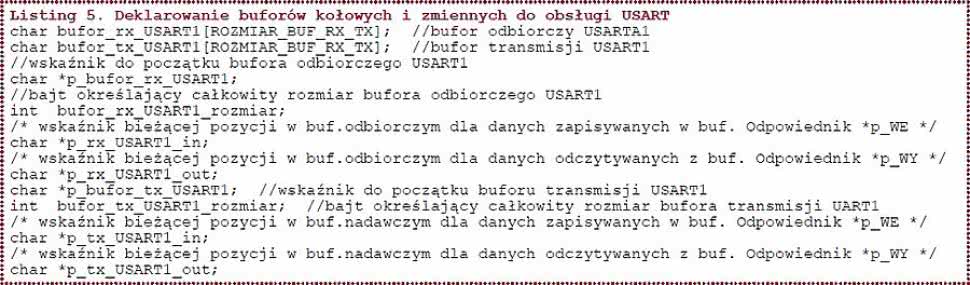
Listing 5. Deklarowanie buforów kołowych i zmiennych do obsługi USART
Zapis kolejnych danych powoduje przesuwanie wskaźnika *p_WE , podczas odczytu danych przechowywanych w buforze to samo dzieje się ze wskaźnikiem *p_WY. Ilość danych aktualnie znajdujących się w buforze to różnica pomiędzy pozycjami p_WE - p_WY. Gdy wskaźniki wskazują na ten sam obszar bufora oznacza to, że jest on pusty.
Sytuacja nieco się skomplikuje, gdy po przewinięciu wskaźnik *p_WE znajdzie się na początku bufora a wskaźnik odczytu *p_WY pod jego koniec. W takim przypadku dla obliczenia ilości danych w buforze należy zsumować różnicę pomiędzy pozycją końca bufora i wskaźnikiem *p_WY oraz różnicę pomiędzy wskaźnikiem *p_WE a pozycją początku bufora.
Dla interfejsu USART można posłużyć się dwoma buforami kołowymi przeznaczonymi dla nadawania i odbioru. Procedury związane z przerwaniami będą musiały ulec modyfikacji. Jednak najpierw należy zadeklarować kilka pomocniczych zmiennych w tym wskaźniki *p_WE i *p_WY bufora odbiorczego i nadawczego. Może to wyglądać, jak na listingu 5.
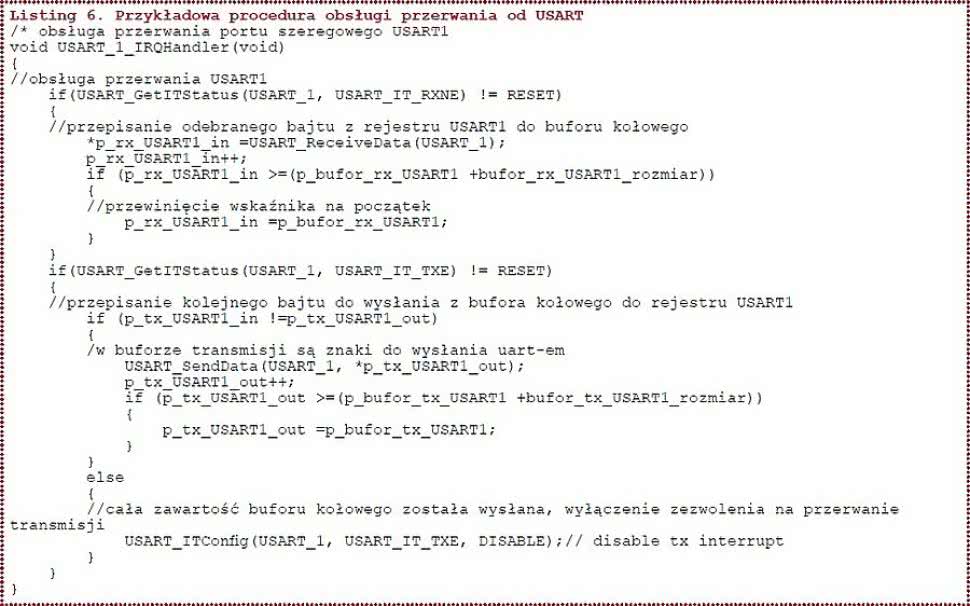
Listing 6. Przykładowa procedura obsługi przerwania od USART
Przed użyciem buforów niektóre zmienne należy zainicjować:
p_bufor_rx_USART1 = &bufor_rx_USART1[0];
bufor_rx_USART1_rozmiar = sizeof(bufor_rx_USART1);
p_rx_USART1_in = &bufor_rx_USART1[0];
p_rx_USART1_out = &bufor_rx_USART1[0];
p_bufor_tx_USART1 = &bufor_tx_USART1[0];
bufor_tx_USART1_rozmiar = sizeof(bufor_tx_USART1);
p_tx_USART1_in = &bufor_tx_USART1[0];
p_tx_USART1_out = &bufor_tx_USART1[0];
Przykładową procedurę obsługi przerwania USART korzystającą z buforów kołowych pokazano na listingu 6.
Program demonstracyjny
Przygotowany program PanEduSTM32F_Demo1_UART zawiera wszystkie opisane wcześniej elementy. Pakiet plików przeznaczony jest dla kompilatora KEIL. Jak zawsze pliki należy umieścić w podkatalogu ProjectSTM32F10x_StdPeriph_Template zainstalowanej biblioteki STM32F10x Standard Peripherals Firmware Library.
Program umożliwia wypisanie za pomocą klawiatury Panelu Edukacyjnego swojego tekstu na wyświetlaczu. Klawiatura działa podobnie do klawiatury telefonu komórkowego. Klawisz S11-Esc pozwala skasować ostatni znak i cofnąć kursor. Po naciśnięciu S12-Entr tekst z wyświetlacza wysyłany jest poprzez konwerter USB Panelu i gniazdo J4 do komputera.
Z kolei tekst przesyłany z komputera jest wyświetlany na wyświetlaczu Panelu począwszy od pozycji kursora. W przypadku tekstu dłuższego niż 32 znaki kolejne bajty danych nadpisywane są na wcześniejszych. Program nie obsługuje kodów polskich liter.
UART jest zaprogramowany do pracy z następującymi ustawieniami: 9600 bps, 8 bitów danych, 1 bit stopu, bez bitu parzystości i sprzętowej kontroli przepływu. Praca w trybie asynchronicznym. Na Panelu Edukacyjnym należy założyć zwory na złączach: JP5, JP2, JP1.
Jeżeli po podłączeniu do portu USB komputera Panel nie zostanie automatycznie wykryty będzie to oznaczać, że należy ręcznie zainstalować sterowniki konwertera USB FT230X. Sterowniki można pobrać ze strony producenta http://www.ftdichip.com/.
Do testów na komputerze należy uruchomić dowolny program terminala. Ja użyłem Br@ya v.1.93b. Ponieważ nie najlepiej sobie radził z wysokim numerem portu USB pod jakim automatycznie się zainstalowały sterowniki, zmieniłem ręcznie numer na niższy od 10.
W Windows7 robi się to po otwarciu Control Panel → Hardware and Sound → Device Manager → Ports (COM, LPT). Następnie należy kliknąć na USB Serial Port z numerem, pod którym został zarejestrowany Panel Edukacyjny. Po wybraniu Port Settings → Advanced należy ręcznie wskazać nowy numer portu i zatwierdzić wybór.
Ryszard Szymaniak, EP












