Zaloguj
Zaloguj



Poprzednio omówiona grupa front-endów ultradźwiękowych obejmowała proste układy, które zasadniczą część funkcjonalności (właściwy pomiar czasu powrotu echa) przerzucały niejako na zewnętrzny mikrokontroler lub scalony stoper wysokiej rozdzielczości. Portfolio TI obejmuje także trzy silnie zintegrowane układy o znacznie bardziej złożonej konstrukcji i – co za tym idzie – realizujące większą część procesu przetwarzania sygnałów, tj. począwszy od generowania impulsów pobudzających przetwornik nadawczy, poprzez odbiór, wstępne kondycjonowanie sygnału echa oraz konwersję analogowo-cyfrową, aż po realizację podstawowych funkcji DSP, złożoną diagnostykę wewnętrzną oraz – finalnie – precyzyjny pomiar czasu.
PGA460 i PGA460-Q1 – informacje ogólne
Wszystkie opisane powyżej cechy ma układ PGA460 oraz jego wersja przeznaczona dla branży automotive i z kwalifikacją AEC-Q100 – PGA460-Q1. Ogólny schemat blokowy układu pokazano na rysunku 1.
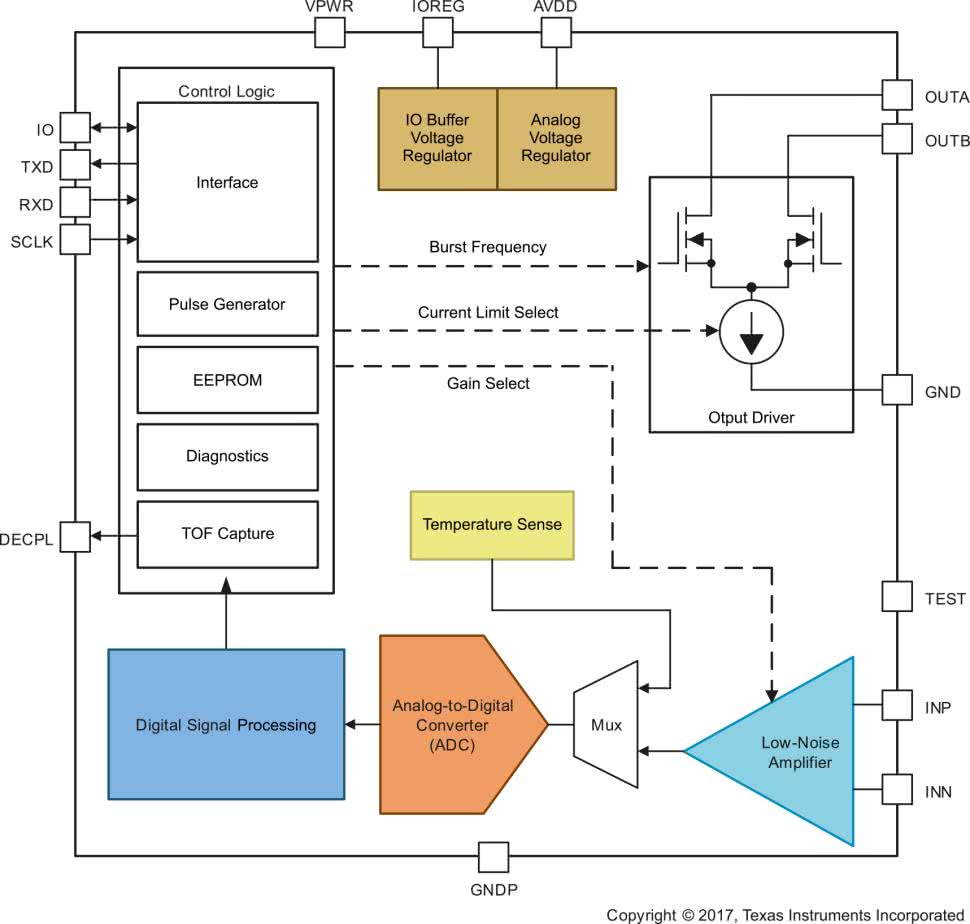
Jak widać, oprócz nieco zbliżonej konstrukcji stopnia wyjściowego (dwa tranzystory w konfiguracji low-side wraz z ogranicznikiem prądowym) oraz faktu obecności wzmacniacza LNA na wejściu toru kondycjonowania sygnałów, front-end ma niewiele wspólnego z konstrukcjami opisanymi w części 16 Poradnika Implementacji. W tym przypadku mamy bowiem do czynienia z wbudowanym, 12-bitowym przetwornikiem ADC, blokiem DSP oraz rozbudowanym kontrolerem cyfrowym, obsługującym interfejsy:
- USART (piny TXD, RXD, SCLK),
- UART (piny TXD, RXD),
- One-wire UART (linia IO),
- TCI (linia IO).
Na pokładzie układu znalazły się także: pamięć EEPROM do przechowywania nastaw rejestrów konfiguracyjnych i niewielkiej ilości danych użytkownika, bufor próbek echa (128 B RAM) oraz bloki diagnostyczne i timer do pomiaru czasu powrotu wiązki.
Zasilanie obwodów wewnętrznych front-endu zapewniają dwa stabilizatory liniowe, dostarczające energię osobno do części analogowej (AVDD) oraz cyfrowej (IOREG) – warto pamiętać, że wspomnianych pinów nie należy obciążać zewnętrznymi układami, gdyż są one przeznaczone jedynie do celu filtracji i odsprzęgania zasilania za pomocą niewielkich kondensatorów.
Producent zastosował interesujące rozwiązanie techniczne, umożliwiające znaczne przyspieszenie i ułatwienie procedury konfiguracyjnej – najważniejsze rejestry konfiguracyjne są zapisywane do pamięci nieulotnej w celu szybkiego odtworzenia ich po włączeniu zasilania systemu. Co więcej, znaczna część ustawień jest podwojona i pogrupowana w tzw. presety – ich użycie pozwala na bardzo szybkie przestrojenie front-endu na zestaw ustawień, które lepiej sprawdzą się w danych warunkach (np. detekcja w polu bliskim lub dalekim).
Rzecz jasna, presety dotyczą parametrów innych niż częstotliwość nadawania (co logiczne, gdyż front-end pracuje w danej aplikacji zawsze z tym samym przetwornikiem).
Tor nadawczy
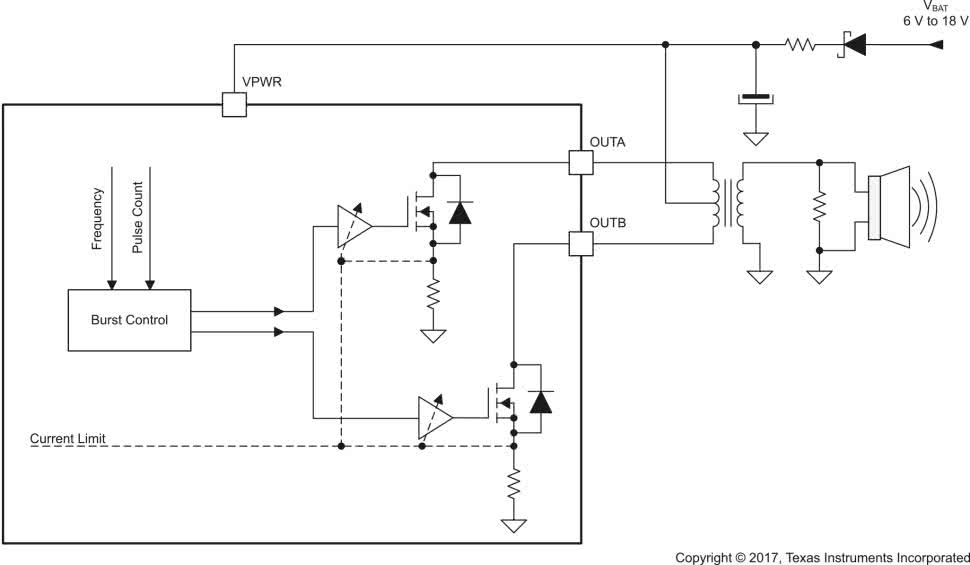
Częstotliwość impulsów stopnia wyjściowego (rysunek 2) ustala zawartość rejestru FREQUENCY oraz bitu FREQ_SHIFT, znajdującego się w rejestrze TVGAIN6.
W przypadku, gdy funkcja przesunięcia zakresu regulacji jest wyłączona (FREQ_SHIFT = 0), wynikowa częstotliwość ma wartość równą (1):
![]()
gdzie:
- fDRV – częstotliwość impulsów wyjściowych,
- [FREQ] – zawartość rejestru FREQUENCY.
Ustawienie bitu FREQ_SHIFT powoduje sześciokrotne zwiększenie częstotliwości wyjściowej względem nastawy określonej równaniem (1), co przesuwa zakres nastaw do przedziału 180...480 kHz. Warto w tym miejscu zauważyć, że producent podaje rozbieżne wartości górnego krańca zakresu nastaw rejestru FREQUENCY: podczas gdy w podrozdziale 7.3.2 dokumentacji pojawia się błędna wartość 200 (co sugerowałoby maksymalny zakres regulacji od 30 do 70 kHz), to już w opisie rejestrów można znaleźć poprawną wartość 250. Błąd pojawia się także w sekcji 7.3.4.1, według której zakres regulacji częstotliwości dla ustawionego bitu FREQ_SHIFT to 80....480 kHz [1].
Liczbę impulsów w paczce wyjściowej ustalają pola bitowe P1_PULSE oraz P2_PULSE, umożliwiające wpisanie liczby w zakresie od 0 do 31 – warto dodać, że ustawienie zera powoduje wygenerowanie pojedynczego impulsu… tylko na wyjściu OUTA, co zdaniem producenta sprawdza się dobrze podczas wykrywania obiektów na niewielkim dystansie od przetwornika ultradźwiękowego.
Wbudowany ogranicznik prądowy może być wyłączony w układach wykorzystujących zewnętrzne tranzystory MOSFET do sterowania transformatorem. Dodatkowo, front-end PGA460 umożliwia zaprogramowanie czasu martwego, tj. krótkiego odcinka czasu, odejmowanego po obu stronach każdego aktywnego półokresu przebiegu wyjściowego (rysunek 3).
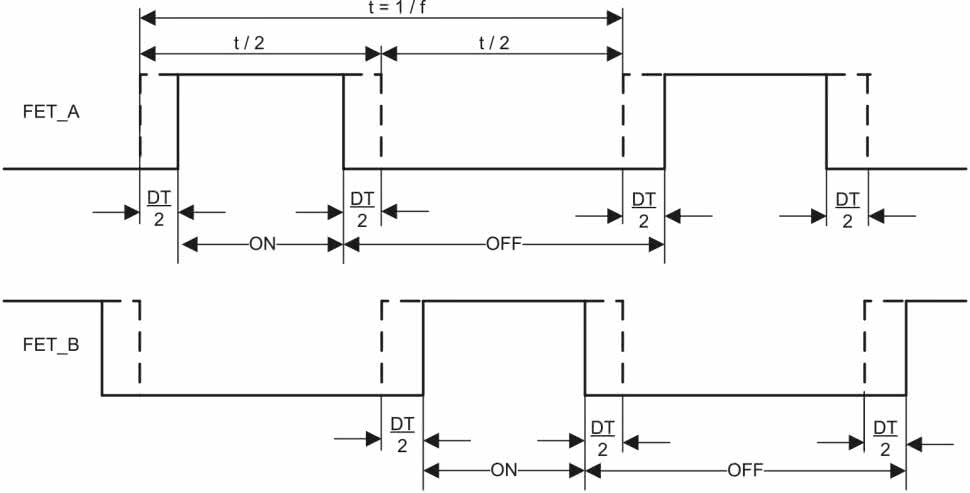
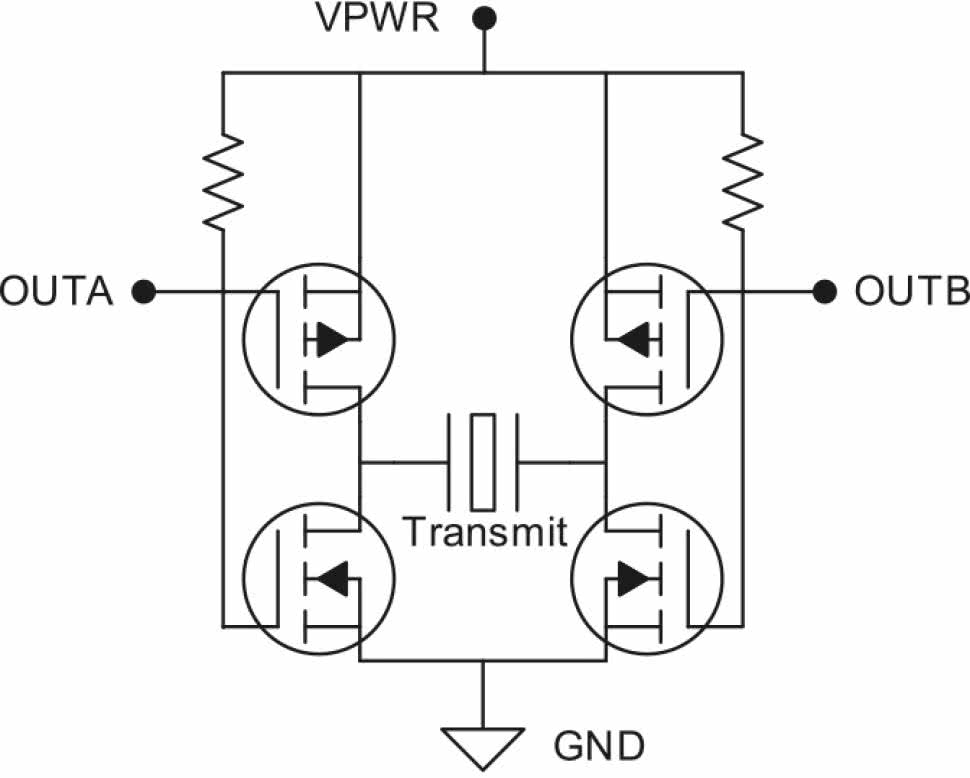
Rozwiązanie takie pozwala nieco ograniczyć prądy zwarcia, powstające podczas przełączania górnych i dolnych tranzystorów zewnętrznego mostka H. Najprostszą realizację takiego mostka, złożoną jedynie z dwóch par tranzystorów komplementarnych i dwóch rezystorów podciągających, pokazano na rysunku 4 – prostota układu jest jednak okupiona istotnym ograniczeniem napięcia zasilania, które nie powinno przekroczyć maksymalnego dopuszczalnego napięcia bramka-źródło zastosowanych tranzystorów (co w praktyce stawia górny zakres napięcia VPWR na poziomie około 20 V).
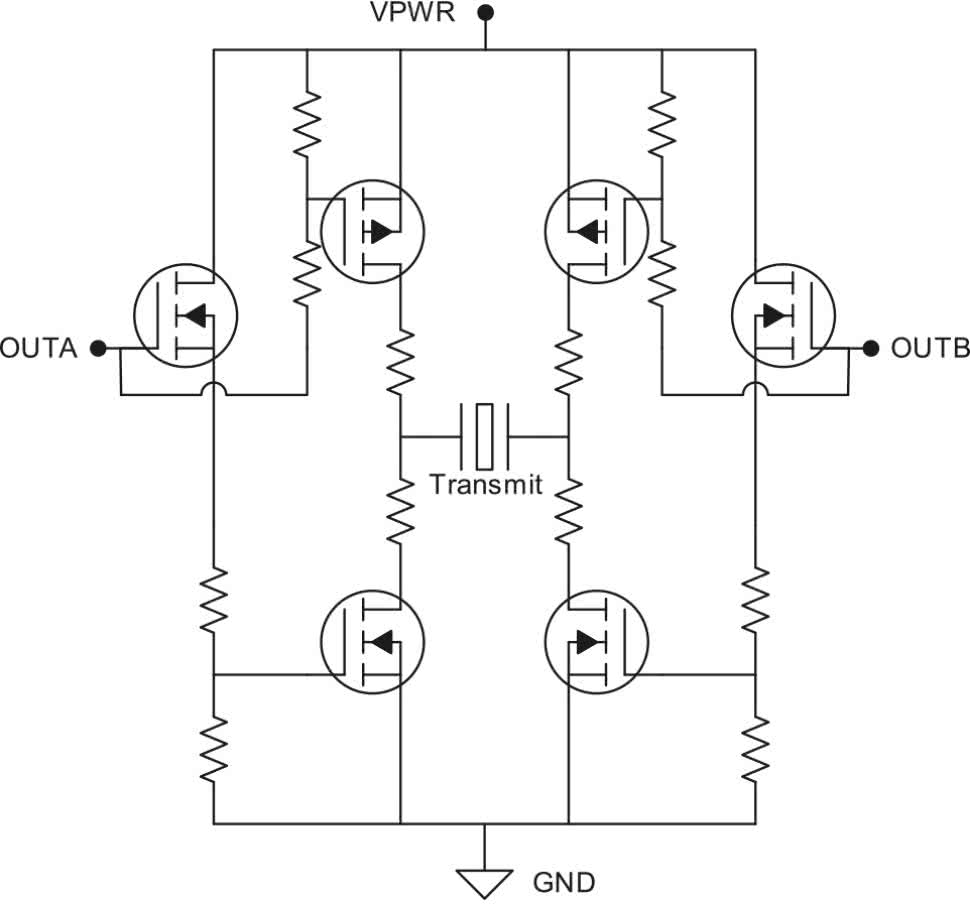
Aby zapobiec tym problemom, można zastosować bardziej rozbudowaną wersję z pomocniczymi tranzystorami i rezystorami, zapewniającymi zarówno właściwe poziomy napięcia bramek, jak i dodatkowe ograniczenie prądu zwarcia (rysunek 5). Należy dodać, że takie rozwiązanie wprowadza kolejne problemy i nie chodzi tutaj tylko o dodatkowe zwiększenie statycznego poboru prądu – stosunkowo wysoka impedancja wypadkowa w obwodach sterowania bramek, w połączeniu z ich pojemnością, wydłuża czasy przełączania tranzystorów, a to znów… może zwiększyć ryzyko przepływu prądów zwarcia.
Potencjalnych problemów związanych z – banalnym, jak mogłoby się wydawać – zagadnieniem „napędzania” przetwornika nadawczego jest znacznie więcej. O ile sytuacja układowa okazuje się nieco prostsza w urządzeniach wykorzystujących osobne przetworniki ultradźwiękowe do nadawania i odbioru fal (ten tryb pracy określa się mianem bistatic – rysunek 6), o tyle aplikacje pracujące z pojedynczym przetwornikiem dwukierunkowym (monostatic) wymagają, by mógł on być pozostawiony w stanie wysokiej impedancji na czas odbioru echa.
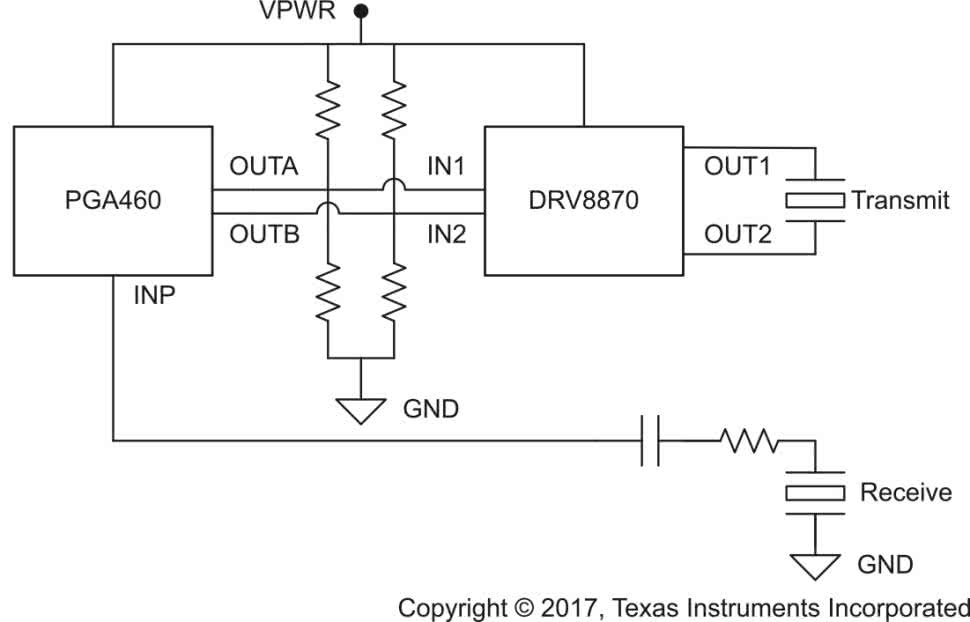
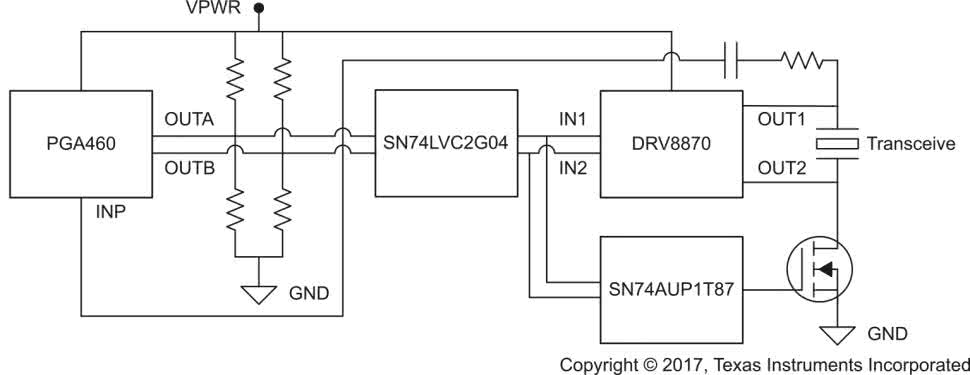
Co więcej – układ PGA460 ma wejście odbiorcze typu single-ended (wbrew temu, co mogłaby sugerować obecność linii INN, wejście wzmacniacza LNA nie ma bowiem topologii różnicowej [2]), co wymusza zastosowanie przetwornika dołączonego – przynajmniej na czas odbioru – jednym wyprowadzeniem do masy układu. Taka konfiguracja prowadzi jednak do znacznej rozbudowy obwodów peryferyjnych front-endu, co najlepiej obrazuje rysunek 7 – pomiędzy AFE a przetwornikiem znajdują się aż trzy dodatkowe układy scalone: SN74LVC2G04 (podwójny inwerter, odwracający stany logiczne wyjść OUTA/B front-endu), SN74AUP1T87 (bramka XNOR, uruchamiająca tranzystor ściągający „dolne” wyprowadzenie przetwornika do masy podczas odbioru) oraz DRV8870 (scalony mostek H, oryginalnie przeznaczony do sterowania silnikami szczotkowymi).
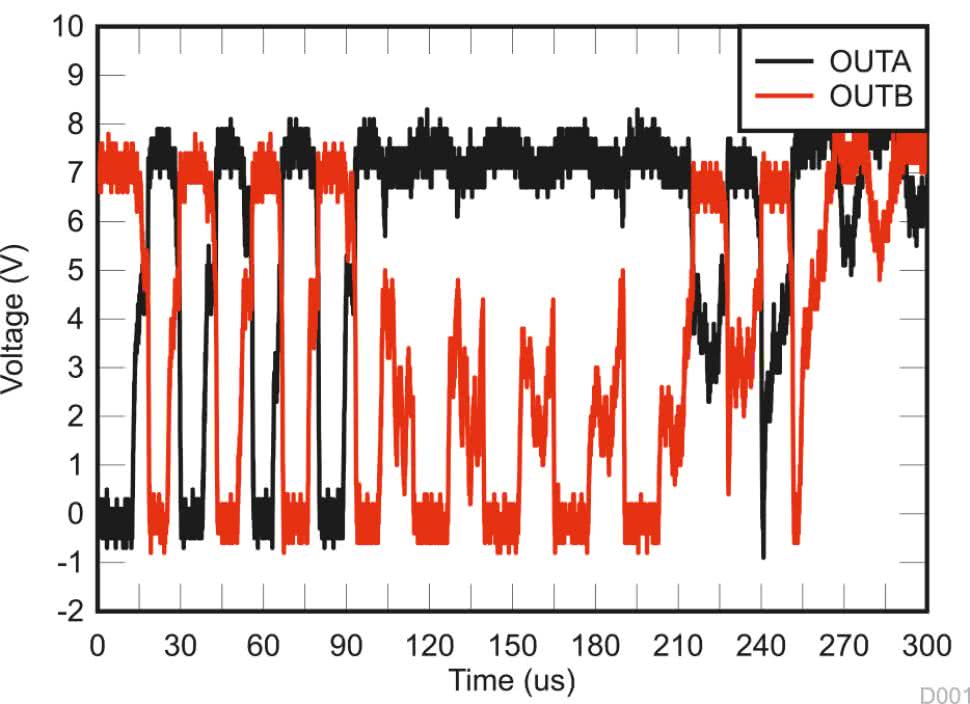
Jakby tego było mało, w niektórych konfiguracjach może występować problem „zatrzaskiwania” (czy też raczej – przejściowego tłumienia) przetwornika, co zobrazowano na rysunku 8. Projektując układ bazujący na PGA460 (lub na dowolnym innym front-endzie, w tym także budowanym od podstaw dla potrzeb danej aplikacji), warto zatem zapoznać się dokładniej z dość wyczerpującą notą aplikacyjną, z której pochodzą rysunki 4...8 (skrócony link podajemy w podpisach ilustracji) – zaprezentowane w niej informacje i propozycje układowe stanowią doskonały punkt wyjścia także do własnych konstrukcji urządzeń ultradźwiękowych.
Tor odbiorczy – część analogowa
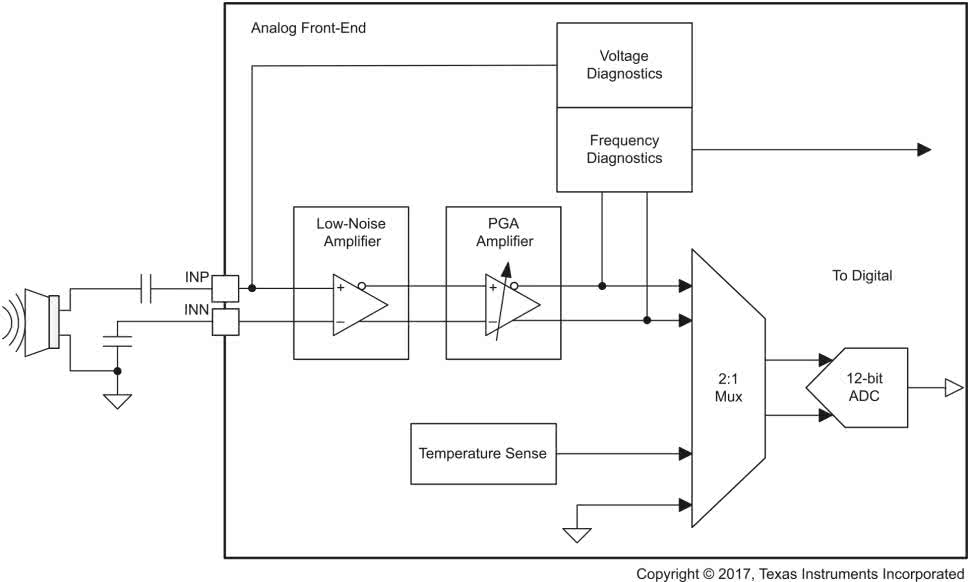
Na rysunku 9 zaprezentowano schemat blokowy toru odbiorczego front-endu PGA460. Pozornie układ ten jest dość prosty, ale ilustracja zdecydowanie nie oddaje rzeczywistych możliwości opisywanego AFE – kaskadowo połączone wzmacniacze: niskoszumowy (LNA) o stałym wzmocnieniu oraz programowalny (PGA) są skierowane do multipleksera, do którego podłączono też wbudowany czujnik temperatury, zaś wyjście multipleksera prowadzi bezpośrednio do przetwornika ADC. W torze głównym (za PGA) włączony jest blok diagnostyczny sprawdzający częstotliwość sygnału, zaś na samym początku układu (bezpośrednio do wejścia INP) wpięto blok testujący napięcie przetwornika.
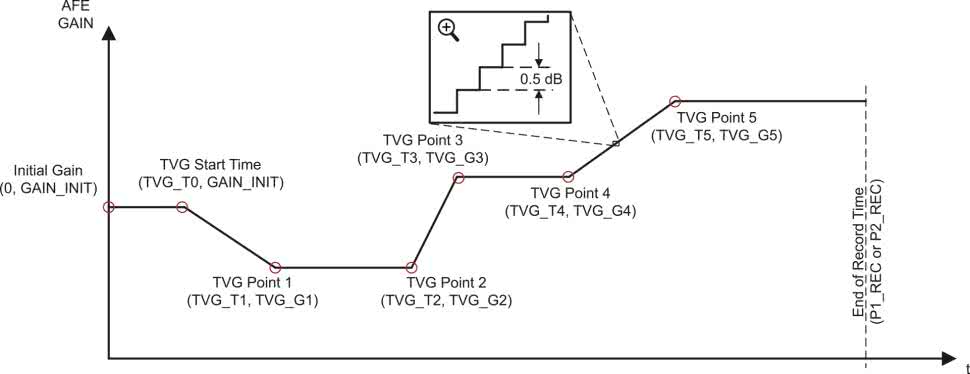
Prawdziwa siła front-endu jest ukryta w jego możliwościach konfiguracyjnych. Konstruktorzy układu zdecydowali się na zastosowanie bardzo interesujących rozwiązań mających na celu maksymalne rozszerzenie zakresu dynamiki pomiarów przy użyciu przetwornika ADC o – nie da się ukryć – niezbyt zawrotnej rozdzielczości bitowej. Wzmacniacz PGA może być ustawiany w zakresie od 32 dB do 90 dB, ale inaczej niż w przypadku zdecydowanej większości front-endów. Najczęściej bowiem regulacja wzmocnienia odbywa się w sposób statyczny – raz ustawiony wzmacniacz utrzymuje dany poziom wzmocnienia aż do resetu lub kolejnej zmiany zawartości rejestru konfiguracyjnego. W przypadku PGA460 do dyspozycji użytkownika jest aż 8 (!) rejestrów, umożliwiających zdefiniowanie 6-punktowego profilu wzmocnienia, zmiennego w czasie i określonego za pomocą par (TVG_Tx, TVG_Gx), gdzie: TVG_Tx – x-ty punkt czasowy, w którym rozpoczyna się zmiana (wzrost lub spadek wzmocnienia), TVG_Gx – x-ta wartość wzmocnienia w odpowiadającym punkcie czasowym. Wszystkie te pola bitowe znajdują się w rejestrach TVGAIN0...6, zaś dodatkowy, ósmy rejestr GAIN_INIT ustala wstępny poziom wzmocnienia, stosowany jeszcze przed punktem (TVG_T0, TVG_G0). Takie rozwiązanie może wydawać się dość skomplikowane, dlatego – w myśl przysłowia mówiącego, że jeden obraz wyraża więcej niż tysiąc słów – na rysunku 10 prezentujemy przykładowy profil wzmocnienia zaprogramowany za pomocą opisanych rejestrów.
Tor odbiorczy – procesor DSP
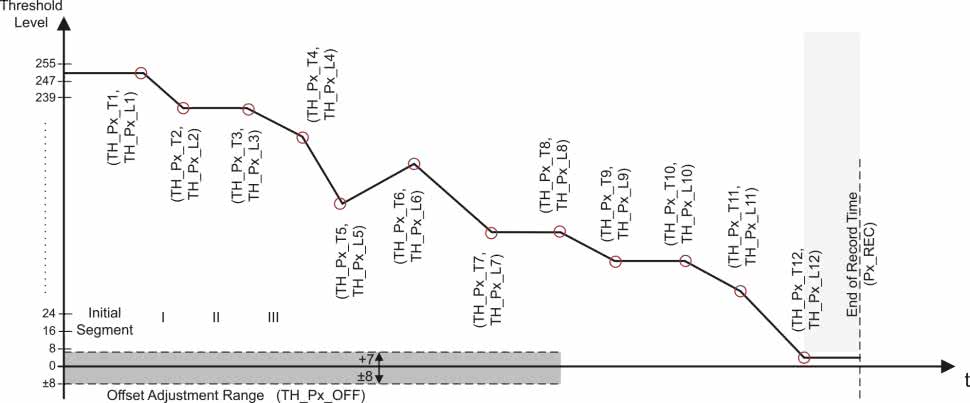
Co ciekawe, dość podobne rozwiązanie zastosował producent w zakresie… progu detekcji sygnału echa. W tym przypadku ustawienia są zapisywane w bloku rejestrów o imponującym rozmiarze aż 32 bajtów, w sposób zbliżony do mapy punktów profilu wzmocnienia (dla każdego punktu ustawiany jest zarówno czas, jak i wartość progu). Warto dodać, że tylko pierwszy segment ma czas określony arbitralnie (tj. od początku fazy odbiorczej) – pozostałe, nazwane mianem delta time, odpowiadają za różnicę czasu pomiędzy danym punktem a poprzednim (rysunek 11). Dla każdego z dwóch presetów użytkownik może określić 12-punktową mapę, przy czym wszystkie odcinki czasowe należą do przedziału od 100 μs do 8000 μs. Dla całego bloku przewidziano nawet dedykowany rejestr sumy kontrolnej, pozwalający na całościowe sprawdzenie poprawności zapisu danych. Przestrajanie progu detekcji wykorzystywanego przez cyfrowy komparator ma oczywiście na celu sukcesywne zwiększanie czułości wraz ze spodziewanym spadkiem amplitudy echa – im dalej położony obiekt, tym później pojawia się pochodzący od niego sygnał i jednocześnie słabszy jest jego poziom.
Detekcja echa odbywa się już w domenie cyfrowej, zatem nasz komparator (przestrajany programowalną mapą) musi znajdować się w bloku DSP, którego schemat funkcjonalny pokazano na rysunku 12. Dane z przetwornika ADC trafiają najpierw do demultipleksera, który rozdziela próbki na dwa sygnały: echa oraz pomiarów temperatury. Ten pierwszy trafia najpierw na filtr pasmowoprzepustowy, pracujący w roli dyskryminatora przepuszczającego jedynie sygnał w wąskim paśmie wokół częstotliwości nadawania – rzecz jasna, filtr jest ustawiany zależnie od zawartości rejestru FREQ, zaś dodatkowo użytkownik ma możliwość zaprogramowania szerokości pasma w zakresie od 2 do 8 kHz (z krokiem co 2 kHz). Należy jednak pamiętać, że automatyczne obliczenie współczynników filtra BPF (Butterworth o nieskończonej odpowiedzi impulsowej) następuje jedynie dla dolnego zakresu częstotliwości (30...80 kHz) – w przypadku ustawienia bitu FREQ_SHIFT rejestry współczynników muszą zostać zaprogramowane przez układ nadrzędny (MCU) za pomocą łącza U(S)ART.
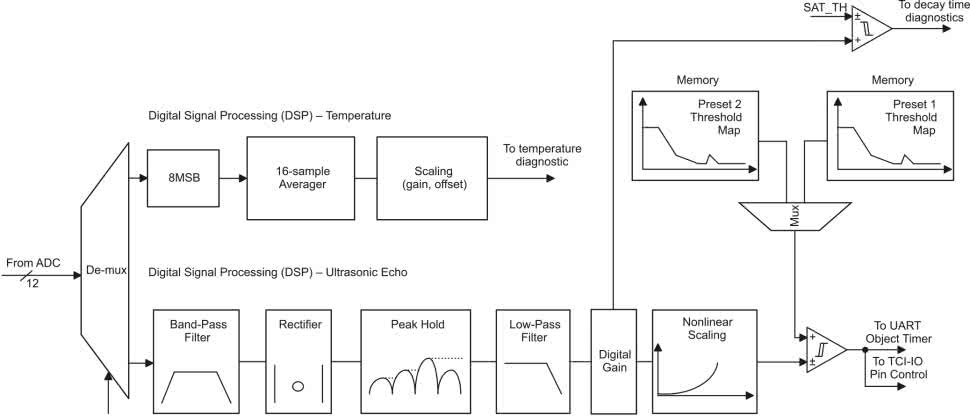
Za blokiem filtru BPF znajduje się sekcja odpowiedzialna za demodulację amplitudową sygnału echa. Po wyprostowaniu sygnału (poprzez proste obliczenie jego wartości bezwzględnej) procesor DSP wykonuje na nim funkcję peak-hold, której zadaniem jest uzyskanie schodkowej obwiedni, poddanej następnie filtracji dolnoprzepustowej w filtrze IIR pierwszego rzędu. Tutaj znów użytkownik ma możliwość ustawienia częstotliwości progowej filtru w zakresie od 1 do 4 kHz (z krokiem co 1 kHz). Kolejnym krokiem – wykonywanym już po właściwej demodulacji – jest wzmocnienie cyfrowe (o tym za chwilę) i skalowanie nieliniowe. To ostatnie odbywa się według prostego algorytmu: przed osiągnięciem zadanego punktu czasowego z mapy progów detekcji (zaprogramowanego w polu bitowym SCALE_N rejestru DSP_SCALE poprzez odniesienie do wybranego z punktów TH_Px_T9...12 – patrz rysunek 11) sygnał z wyjścia LPF zostaje przesłany dalej bez zmian. Po przekroczeniu wspomnianego punktu od sygnału wyjściowego LPF odejmowana jest natomiast arbitralnie ustawiona (za pomocą pola bitowego NOISE_LVL) wartość poziomu szumu, po czym wynik odejmowania jest podnoszony do potęgi za pomocą wykładnika ustawionego przez bit SCALE_K, także znajdujący się w rejestrze DSP_SCALE. Zadaniem operacji skalowania nieliniowego jest dodatkowe zwiększenie odstępu sygnał-szum w przypadku słabego echa odległych obiektów.
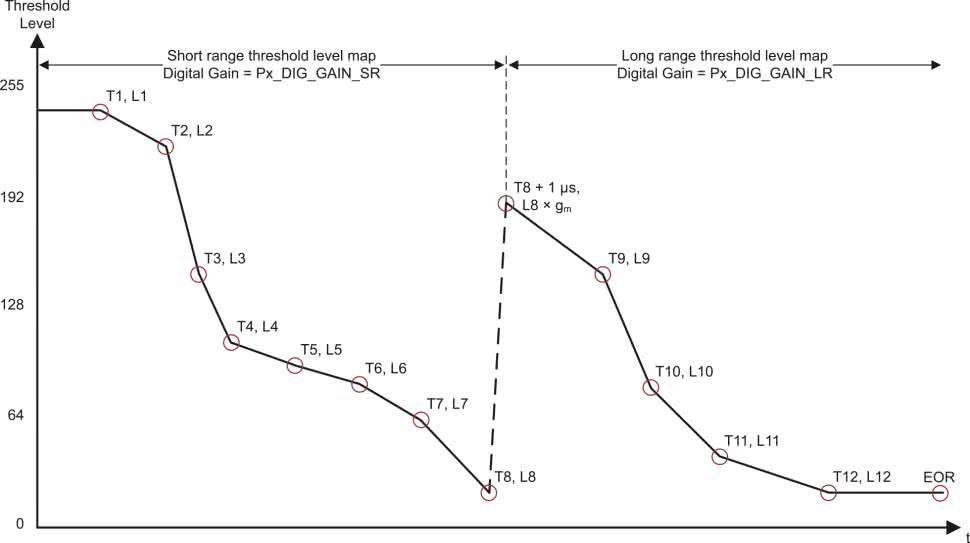
W podobnym celu, choć znacznie prościej, producent zrealizował także funkcję wzmocnienia cyfrowego, której działanie pokazano na rysunku 13. Do dyspozycji użytkownika są (osobne dla obu presetów) pola bitowe, pozwalające na ustawienie wzmocnienia dla echa w polu bliskim i dalekim, a także punktu czasowego (TH9...TH12), w którym ma nastąpić przełączenie wzmocnienia. Aby uniknąć „fałszywego alarmu”, czyli niewłaściwego zadziałania detektora echa w wyniku nagłego wzrostu wartości sygnału po zmianie wzmocnienia, front-end automatycznie przemnaża próbki sygnału pomiarowego zgodnie z ustawieniem progu dla danego obszaru pola (bliskie/dalekie). Dzięki temu zabiegowi amplituda słabego echa odległych obiektów może być dodatkowo zwiększona na drodze prostej operacji cyfrowej, zaaplikowanej jednak dopiero po etapie demodulacji i filtracji dolnoprzepustowej – czyli już po usunięciu większości szumów z różnych źródeł.
Diagnostyka
Układ PGA460 ma kilka wbudowanych funkcji diagnostycznych, których celem jest wykrycie możliwie szerokiego spektrum potencjalnych awarii systemu lub warunków zewnętrznych uniemożliwiających jego poprawną pracę.
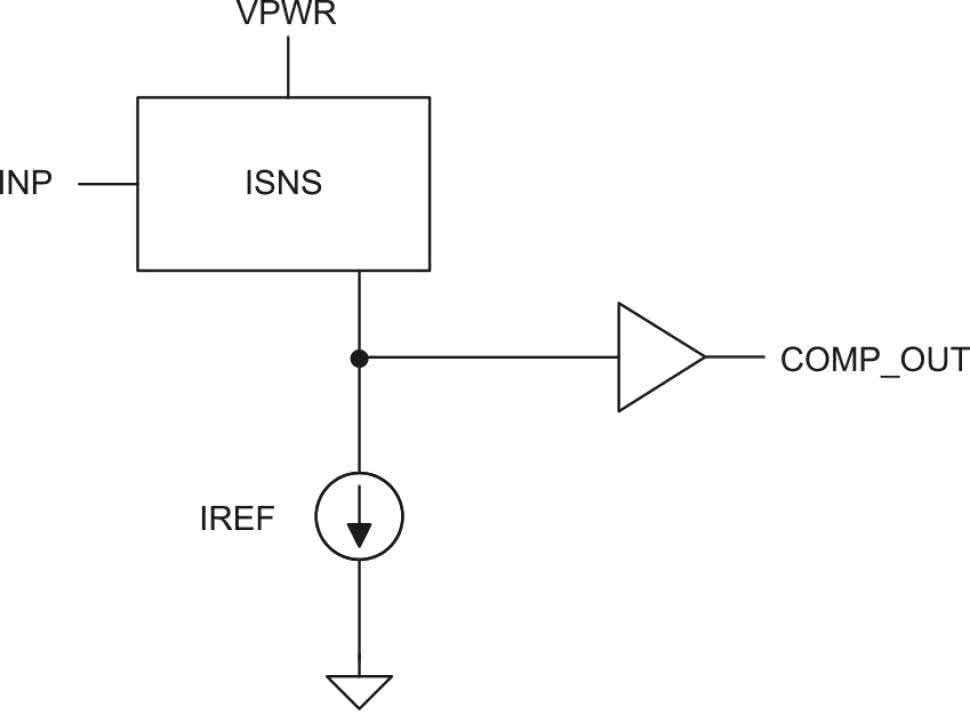
- Diagnostyka napięcia pobudzającego przetwornik – impulsy pobudzające przetwornik w fazie nadawczej trafiają także na wejście INP, co powoduje przepływ przezeń niewielkiego prądu. Ten zaś porównywany jest przez wbudowany komparator z wewnętrznym źródłem prądowym (rysunek 14) – jeżeli sygnał na linii INP ma zbyt małą amplitudę (lub przeciwnie – utrzymuje się na wysokim poziomie nawet poza fazą nadawania), zgłoszony zostaje błąd, który można następnie odczytać przez jeden z interfejsów komunikacyjnych.
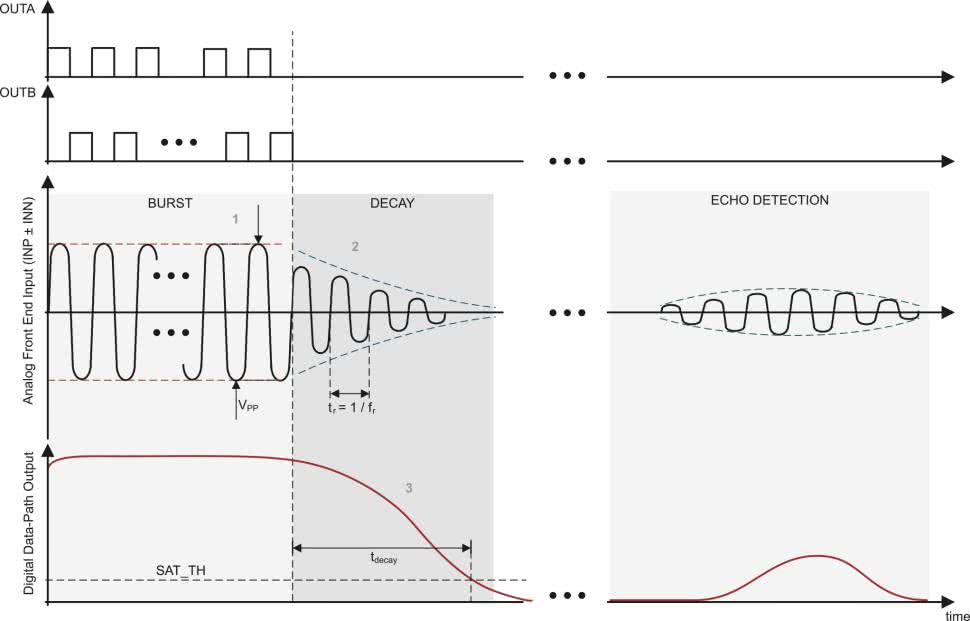
- Pomiar częstotliwości przetwornika – po zakończeniu nadawania (tj. po przełączeniu front-endu w fazę odbioru echa) sygnał przetwornika ma postać drgań gasnących. Blok pomiaru częstotliwości uruchamia się po arbitralnie określonym przez użytkownika czasie, mierzy czas odpowiadający kilku kolejnym okresom przebiegu, po czym uśrednioną wartość udostępnia za pomocą dowolnego z interfejsów komunikacyjnych. Dodatkowo, jeżeli okres przebiegu różni się od spodziewanego o wartość większą niż dopuszczalna odchyłka zaprogramowana w rejestrze SAT_FDIAG_TH (wyrażona w mikrosekundach), układ zgłasza błąd za pośrednictwem TCI bądź UART. Funkcja diagnostyki częstotliwości może być wykorzystana np. do sprawdzenia poprawności dopasowania przetwornika (i – jeżeli został zastosowany – także transformatora).
- Pomiar czasu zaniku drgań – na podstawie zdemodulowanego sygnału z przetwornika front-end PGA460 jest w stanie określić czas zaniku drgań rezonansowych, odmierzając (z 16-mikrosekundową rozdzielczością) czas upływający od zakończenia nadawania do spadku sygnału poniżej progu zaprogramowanego poprzez parametr SAT_TH. Wraz z pomiarem częstotliwości funkcja ta może być zastosowana do detekcji mechanicznej blokady membrany przetwornika, wywołanej np. przez zgromadzone na niej zanieczyszczenia.
Działanie wszystkich opisanych funkcji oceniających kondycję przetwornika, oferowanych przez front-end PGA460, pokazano schematycznie na rysunku 15. To jednak nie koniec możliwości diagnostycznych układu, gdyż producent przewidział ponadto kilka dodatkowych metod automatycznego testowania parametrów pracy samego AFE.
- Pomiar poziomu szumu – układ PGA460 może automatycznie zmierzyć szum tła poprzez zebranie odczytów z ADC w dwóch buforach o rozmiarze 4096 próbek, uśrednienie ich, a następnie zapisanie wyższej z obu wartości. Co ważne, w tym trybie wyłączone jest nadawanie oraz funkcja skalowania nieliniowego. Funkcji pomiaru szumów można użyć do określenia „hałasu” w wykorzystywanym paśmie ultradźwiękowym, powodowanego zwłaszcza przez inne przetworniki nadawcze.
- Detekcja problemów z zasilaniem – informacje o przekroczeniu nominalnego zakresu napięcia zasilania (OV – overvoltage, UV – undervoltage) oraz temperatury roboczej są dostępne w rejestrze DEV_STAT1 i raportowane – w przypadku napięć – osobno dla pinów IOREG, AVDD oraz VPWR. Dodatkowo układ monitoruje pobór prądu, jednak stosowna informacja nie jest dostępna dla użytkownika, ale wykorzystywana bezpośrednio do zabezpieczenia wbudowanych stabilizatorów napięcia.
Funkcje odsprzęgania przetwornika
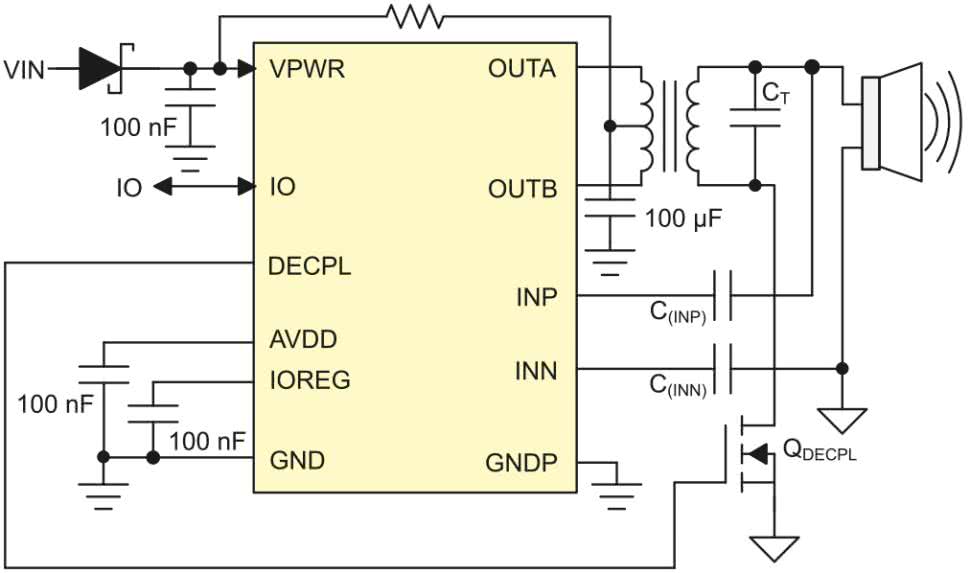
Twórcy front-endu PGA460 przewidzieli dwie funkcje, umożliwiające sterowane elektronicznie odsprzęganie uzwojenia wtórnego transformatora dopasowującego bądź dodatkowego kondensatora, włączonego równolegle do przetwornika. W pierwszym przypadku (pokazanym na rysunku 16) jedno z wyprowadzeń uzwojenia wtórnego należy podłączyć przez zewnętrzny tranzystor MOSFET-N do masy. Bramka tranzystora jest sterowana bezpośrednio przez wyjście DECPL, co umożliwia chwilowe odpięcie transformatora od masy w celu redukcji obciążenia elementu piezoelektryczngo przetwornika – celem operacji ma być zwiększenie jego czułości w fazie odbioru echa (natomiast podczas nadawania tranzystor ten jest włączany, co pozwala na odpowiednie wysterowanie przetwornika).
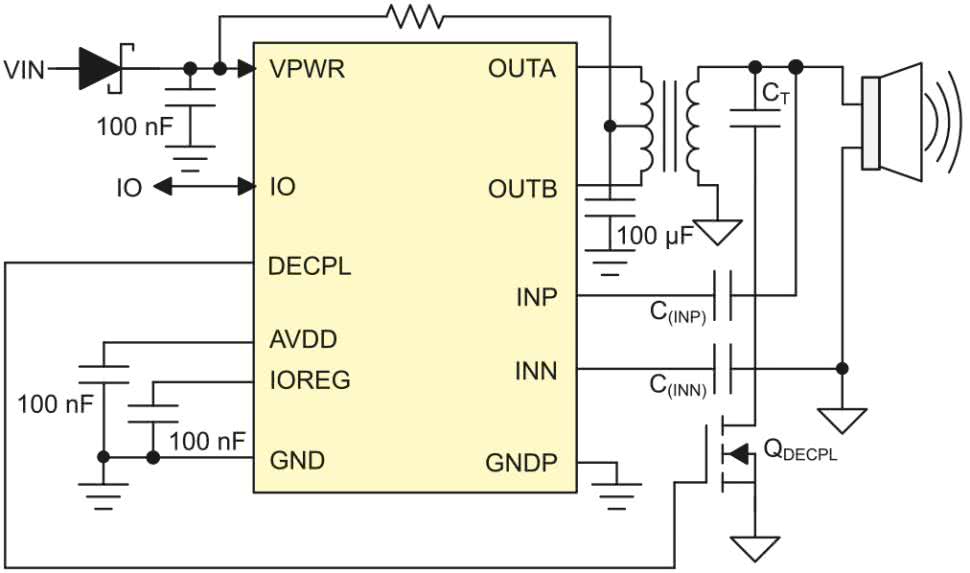
Istnieje także możliwość wykorzystania pomiarów z wbudowanego czujnika temperatury do… zgrubnej kompensacji nieliniowości termicznej przetwornika – w tym scenariuszu (rysunek 17) tranzystor jest otwierany po obniżeniu temperatury poniżej progu zaprogramowanego za pomocą pola DECPL_T – powoduje to podłączenie niewielkiego kondensatora zewnętrznego równolegle do przetwornika.
Wyprowadzenie TEST
Obecny w układzie pin testowy umożliwia wyprowadzenie na zewnątrz front-endu użytecznych sygnałów diagnostycznych, obsługiwanych przez dedykowane multipleksery i bufory (rysunek 18).
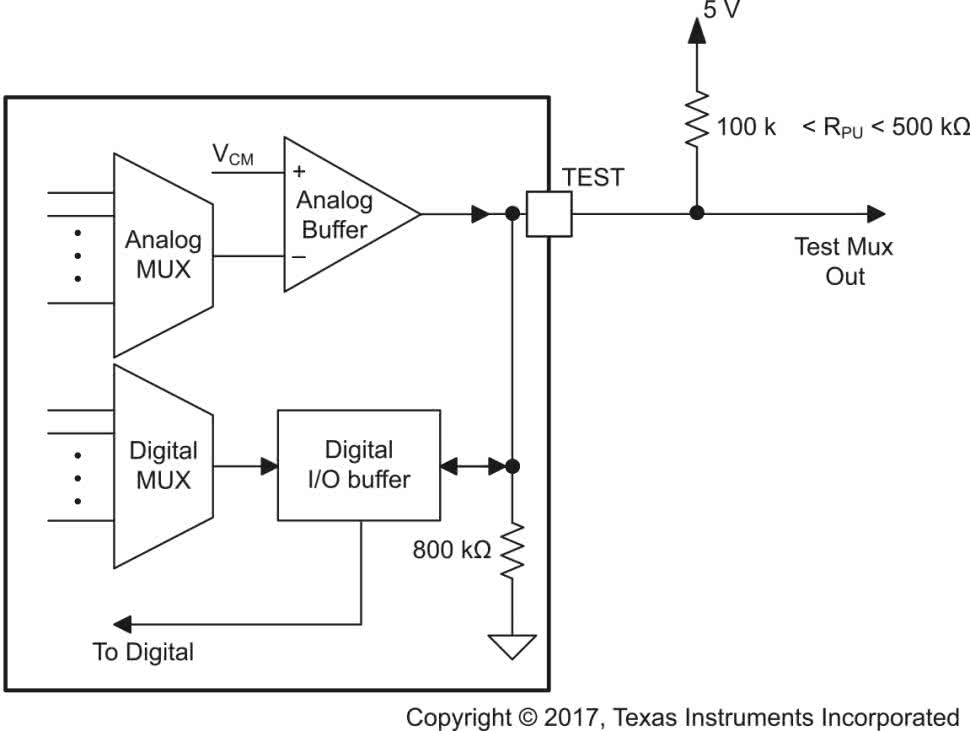
O ile pomiar napięcia wejściowego ADC może być przydatny w niektórych sytuacjach, o tyle znacznie ważniejszy okazuje się dostęp do 8-megahercowego sygnału zegarowego, będącego po prostu podzielonym przez dwa przebiegiem głównego oscylatora wewnętrznego front-endu. I tutaj warto wspomnieć o istotnej wadzie układu PGA460 – dokładność tegoż generatora to ±0,5 MHz i to w warunkach.... temperatury pokojowej, co stanowi tolerancję ponad 3%. Co więcej, w nocie katalogowej producent nie podaje termicznego współczynnika częstotliwości, co wydaje się dość dziwne, zważywszy na kluczowe znaczenie dokładności wzorca czasu w pomiarach ToF. Możliwość skontrolowania sygnału na linii TEST przez zewnętrzny mikrokontroler daje co prawda szansę precyzyjnej kalibracji, jest to jednak dodatkowy zabieg, którego konieczność – przy tak wyczerpującym potraktowaniu tematyki pomiarów ultradźwiękowych przez konstruktorów front-endu – wydaje się dość zaskakująca. Niemniej dziwi brak możliwości podłączenia rezonatora kwarcowego bądź zewnętrznego źródła sygnału taktowania (np. TCXO), co jest przecież standardem w wielu AFE, nawet tych o znacznie mniej krytycznym znaczeniu stabilności czasowej pomiarów.
Warto dodać, że pin TEST jest też używany do wyboru napięcia pracy wyprowadzeń cyfrowych – stan linii zatrzaskuje się po uruchomieniu układu (włączeniu zasilania) i decyduje o tym, czy wyprowadzenia RXD, TXD, SCLK, DECPL oraz TEST mają pracować z logiką 3,3 V, czy też 5 V.
Rozbudowa systemu do postaci wielokanałowej
Interesujące propozycje rozbudowy urządzenia bazującego na front-endzie PGA460 zaprezentował producent w nocie aplikacyjnej SLAA783 pt. PGA460 Array of Ultrasonic Transducers for Triangulation and Tracking. Zastosowanie dwóch transceiverów ultradźwiękowych bądź jednego transceivera i jednego układu odbiorczego (bez możliwości nadawania) pozwala na zbudowanie systemu zdolnego do obliczania pozycji obiektu metodą triangulacji. Przykład takiej realizacji pokazano schematycznie na rysunku 19.
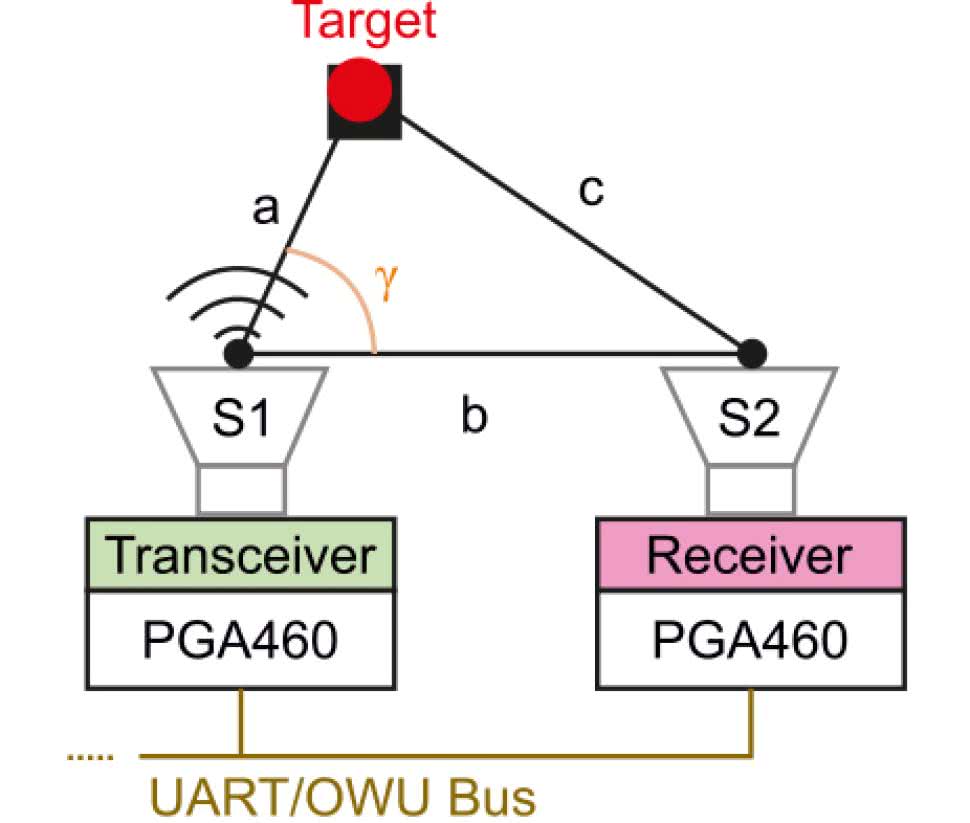
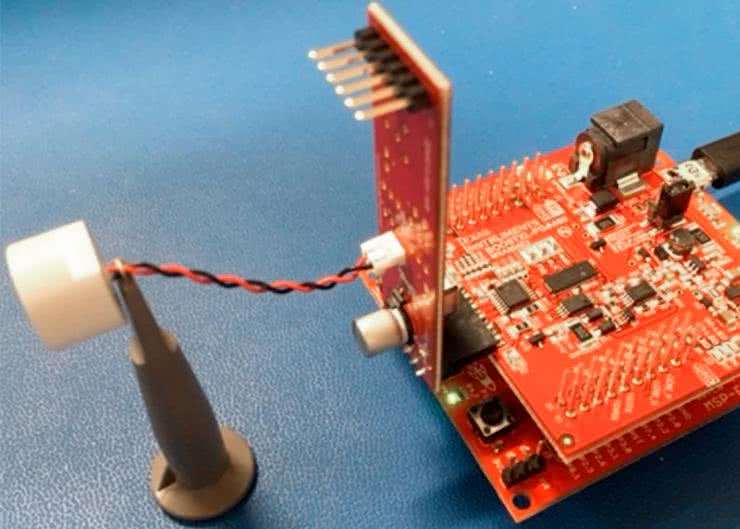
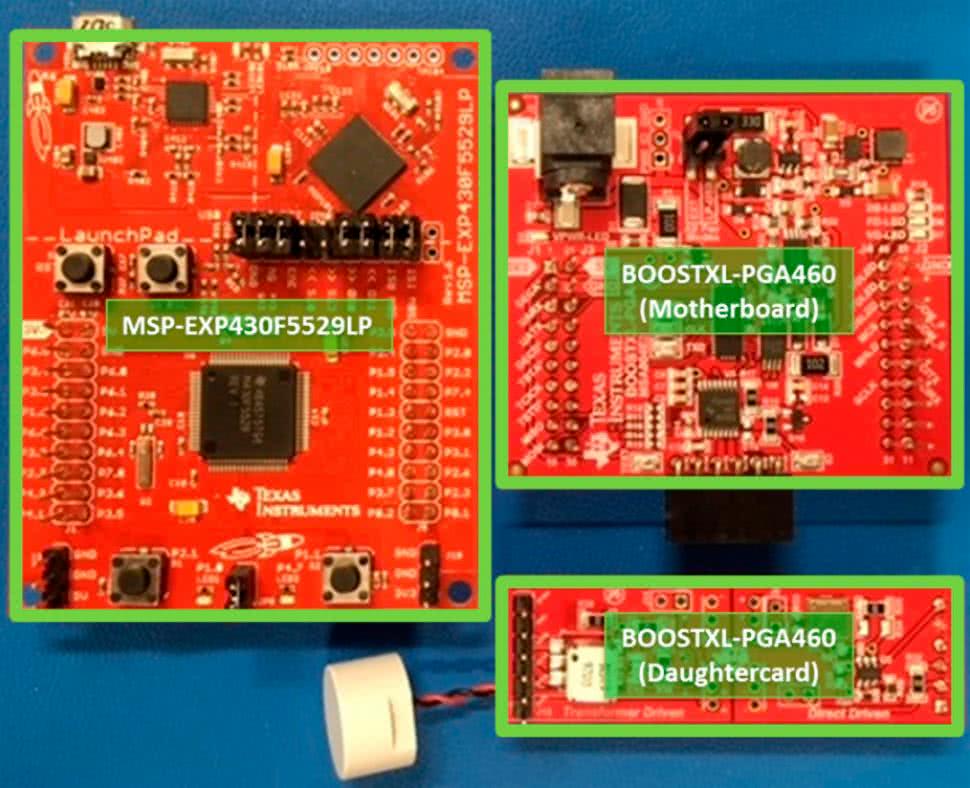
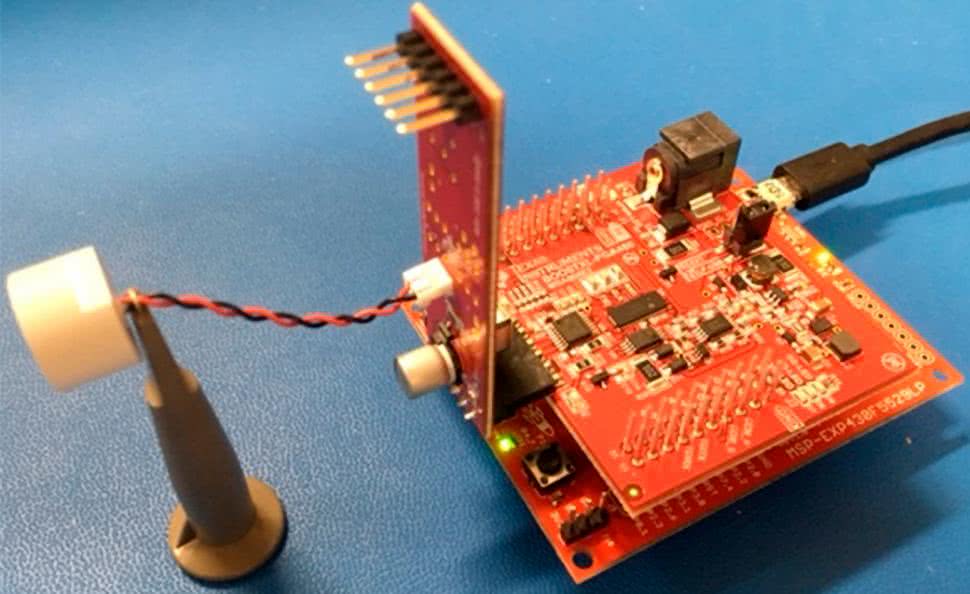
Synchronizacja jest możliwa dzięki zastosowaniu wspólnej szyny UART/one-wire UART i komend z grupy broadcastingu. Opisane w dokumencie metody pozwalają znakomicie zwiększyć uniwersalność systemu w porównaniu do prostej realizacji, wykorzystującej kilka rozdzielonych funkcjonalnie przetworników (co ma miejsce np. w tanich zestawach czujników parkowania). Dla osób zainteresowanych rozwojem aplikacji bazujących na PGA460 istotna będzie informacja, że producent opracował rozbudowany zestaw ewaluacyjny, składający się z płytki głównej (bazującej na mikrokontrolerze MSP430F5529), płytki front-endu oraz niewielkiej PCB wyposażonej w dwa różne przetworniki ultradźwiękowe wraz z układami dopasowującymi (fotografie 1 i 2).
Podsumowanie
Wyjątkowo w historii naszego cyklu poświęciliśmy cały odcinek tylko jednemu układowi. Taka decyzja była podyktowana wieloma interesującymi rozwiązaniami, które producent front-endu PGA460 zastosował w celu zwiększenia zarówno zakresu dynamiki, jak i niezawodności systemu. Podejście polegające na implementacji wzmacniacza PGA oraz cyfrowego komparatora, których parametry zmieniają się w czasie w sposób arbitralnie określony za pomocą map punktów pozwala bowiem na maksymalne wykorzystanie możliwości przeciętnego przetwornika ADC o rozdzielczości zaledwie 12 bitów. Nietrudno zauważyć, że koncepcja ta jest diametralnie inną realizacją potrzeby, którą w prostszych układach rozwiązano za pomocą wzmacniacza logarytmicznego. W tym przypadku jednak całość działa bardzo selektywnie – poszczególne stopnie kondycjonowania sygnału za pomocą wbudowanego procesora DSP sukcesywnie wycinają z sygnału echa niepożądane składowe pasma częstotliwości (filtr BPF i LPF), a dodatkowo zdemodulowany sygnał zostaje poddany skalowaniu nieliniowemu i (znów przestrajanemu w czasie) wzmocnieniu cyfrowemu. Możliwość takiego kształtowania charakterystyki przejściowej całego toru odbiorczego w funkcji czasu wynika oczywiście z fizyki pomiarów ultradźwiękowych – im dalej oddalone są wykrywane obiekty, tym słabsze jest ich echo (fala słabnie wraz z odległością, a dodatkowo ulega tłumieniu przy odbiciu od materiałów o zróżnicowanych właściwościach akustycznych), ale także – później się to echo pojawia (co nie dziwi w przypadku pomiarów ToF). Jak widać, producent doskonale wykorzystał taki rozdział sygnałów w domenie czasu, umożliwiając zastosowanie tego samego front-endu do wykrywania zarówno bardzo blisko położonych obiektów (rzędu pojedynczych centymetrów, a nawet mniej), jak i przeszkód oddalonych od przetwornika (teoretycznie nawet do około 11 metrów). Na pochwałę zasługują także dobrze dopracowane funkcje automatycznej diagnostyki na różnych poziomach architektury systemu.
Nietrudno odnieść wrażenie, że konstruktorom Texas Instruments nie udało się uniknąć pewnych wad układu i rozwiązań o dość ograniczonej sensowności. Zdecydowanie „kłuje w oczy” – zwłaszcza w układzie AFE tej klasy – brak wejścia dla zewnętrznego sygnału zegarowego, choć możliwość wyprowadzenia sygnału wewnętrznego oscylatora na wyjście testowe częściowo kompensuje tę niedogodność. Dokumentacja układu pozostawia nieco do życzenia z uwagi na istniejące w niej błędy, co w powiązaniu z nieintuicyjnym „rozrzuceniem” rozmaitych, pojedynczych bitów, jak i całych pól bitowych, po różnych rejestrach (przykładowo, w jednym z nich o nazwie DECPL_TEMP, znajdują się jednocześnie bity sterujące funkcjami odsprzęgania, trybami obniżonego poboru mocy oraz zakresem wzmocnienia front-endu…) wprowadza niemałe zamieszanie podczas studiowania noty katalogowej.
Niezależnie jednak od wspomnianych niedogodności, układ PGA460 jawi się jako interesująca propozycja dla konstruktorów systemów ultradźwiękowych i doskonała inspiracja – nieszablonowe myślenie inżynierskie oraz sprawne wykorzystanie zjawisk fizycznych występujących podczas prowadzenia określonego typu pomiarów, pozwalają bowiem znacząco zwiększyć możliwości projektowanego układu.
inż. Przemysław Musz, EP
[1] Dotyczy wersji noty katalogowej ze stycznia 2019 (Rev B), aktualnej w czasie pisania niniejszego artykułu.
[2] Taką informację podaje producent w dokumencie https://t.ly/bSgV