Zaloguj
Zaloguj




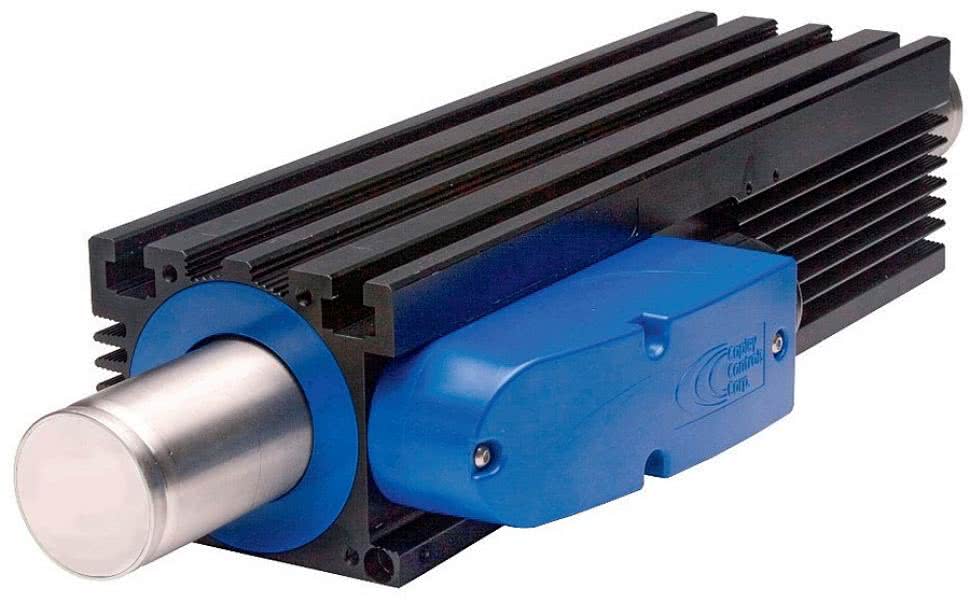
Fotografia 1. Silniki liniowe ServoTube firmy Dunkermotoren
Od niedawna w ofercie WObit dostępne są roboty kartezjańskie o wysokiej dynamice – przyspieszeniu do 586 m/s², prędkości do 10,6 m/s oraz powtarzalności do 0,12 mm, których bazę stanowią silniki liniowe Servo-Tube firmy Dunkermotoren (fot. 1). Silniki DLS mają zintegrowane czujniki Halla, które gwarantują powtarzalność ruchu na poziomie 12 mikrometrów. Modele z serii ST25 charakteryzują się ciągłą siłą w zakresie 51 do 102 N, natomiast chwilowo do 780 N. Silniki są zamknięte w prostokątnej, kompaktowej obudowie dzięki czemu ich montaż jest bardzo prosty zarówno w pozycji poziomej jak i pionowej. Standardowo silniki mają stopień ochrony IP67, jednak dla aplikacji w przemyśle spożywczym czy medycznym dostępna jest dodatkowo uszczelniona wersja ze stali nierdzewnej o stopniu ochrony IP69K. Dodatkowo silniki ServoTube wyposażone są w suche łożyska polimerowe a do chłodzenia stosowana jest zwykła woda. Dzięki temu silniki nie mają żadnego wpływu na środowisko, ich praca jest cicha i bezobsługowa. Napędy liniowe ServoTube mogą pracować jako aktuator, wtedy elementem ruchomym jest trzpień ze stali nierdzewnej, którego środek wykonany jest z magnesów neodymowych. Trzpień może być również obustronnie przymocowany, wtedy elementem ruchomym jest silnik (siłownik).
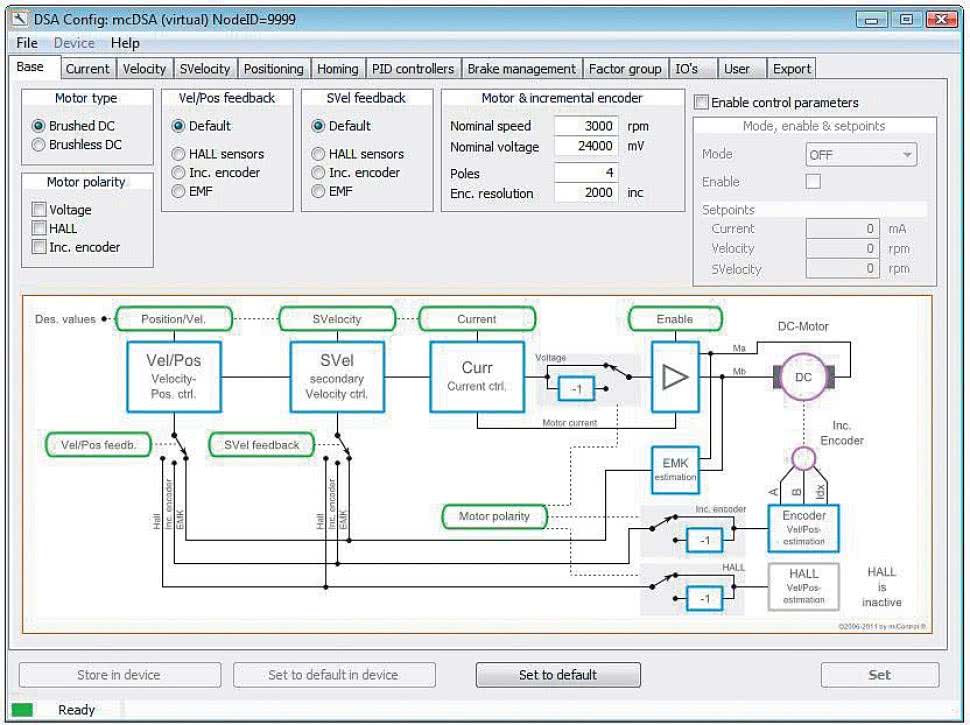
Rysunek 2. Oprogramowanie mcTools
Kompaktowa konstrukcja oraz doskonałe parametry tych napędów pozwalają na łatwe wykorzystanie ich w układach bramowych czy aplikacjach wieloosiowych. Przykładowo w oparciu o silniki liniowe z serii ST25 oraz moduły liniowe można wykonać układ XYZ z dwoma modułami pracującymi w osi X, jednym modułem realizującym ruch w osi Y, a jako element wykonawczy w osi Z można zastosować aktuator o wysokiej sztywności np. XTR 2506. Sterowanie silnikami ST25 realizowane jest za pomocą funkcjonalnych sterowników mcDSA-E47 niemieckiej firmy miControl, której WObit jest dystrybutorem na polskim rynku. Sterownik może pracować w temperaturze od 0 do 70°C. Jest on wyposażony w siedem wejść i dwa wyjścia cyfrowe, wejście enkoderowe i dla czujników Halla, a także w wejście analogowe. Komunikacja standardowo odbywa się w protokole CAN, jednak dostępne są również modele wyposażone w EtherCAT, Profibus, Modbus oraz RS232.
Fotografia 3. Moduły MLAS ze śrubą kulową
Do sterowników miControl dostępne jest oprogramowanie mcTools na PC (fot. 2), które pozwala na kontrolę różnorodnych parametrów silnika. Sterownik mi- Control umożliwia regulację silnika w pętli zamkniętej w oparciu o kaskady regulatora PID. W zależności od wymagań aplikacji mamy do dyspozycji tryb regulacji prądu, prędkości oraz pozycji. Tryby prędkości oraz pozycji posiadają opcję profilu, dzięki temu możemy ustawić przyspieszenie oraz prędkość maksymalną, z jaką wykonuje się ruch. Funkcja ta umożliwia również hamowanie z zadanym opóźnieniem. Aplikacja za pośrednictwem zakładki PID Controlers umożliwia konfigurację wszystkich parametrów regulatora (takich jak wzmocnienie czasu zdwojenia, czasu wyprzedzenia, czy też wzmocnienia sprzężenia w przód). Sprzężenie zwrotne pozycji silnika może być konfigurowane w zależności od wyposażenia silnika, poprzez zastosowanie sprzężenia od enkodera inkrementalnego, czujnika Halla lub regulację bez czujników opartą na estymacji pozycji wirnika przy użyciu modelu matematycznego czujnika. Program mcTools pozwala również na ustawienie parametrów związanych z hamowaniem, zmianę jednostek parametrów, dodanie określonych funkcji dla wejść i wyjść cyfrowych, jak również dla wejść analogowych.
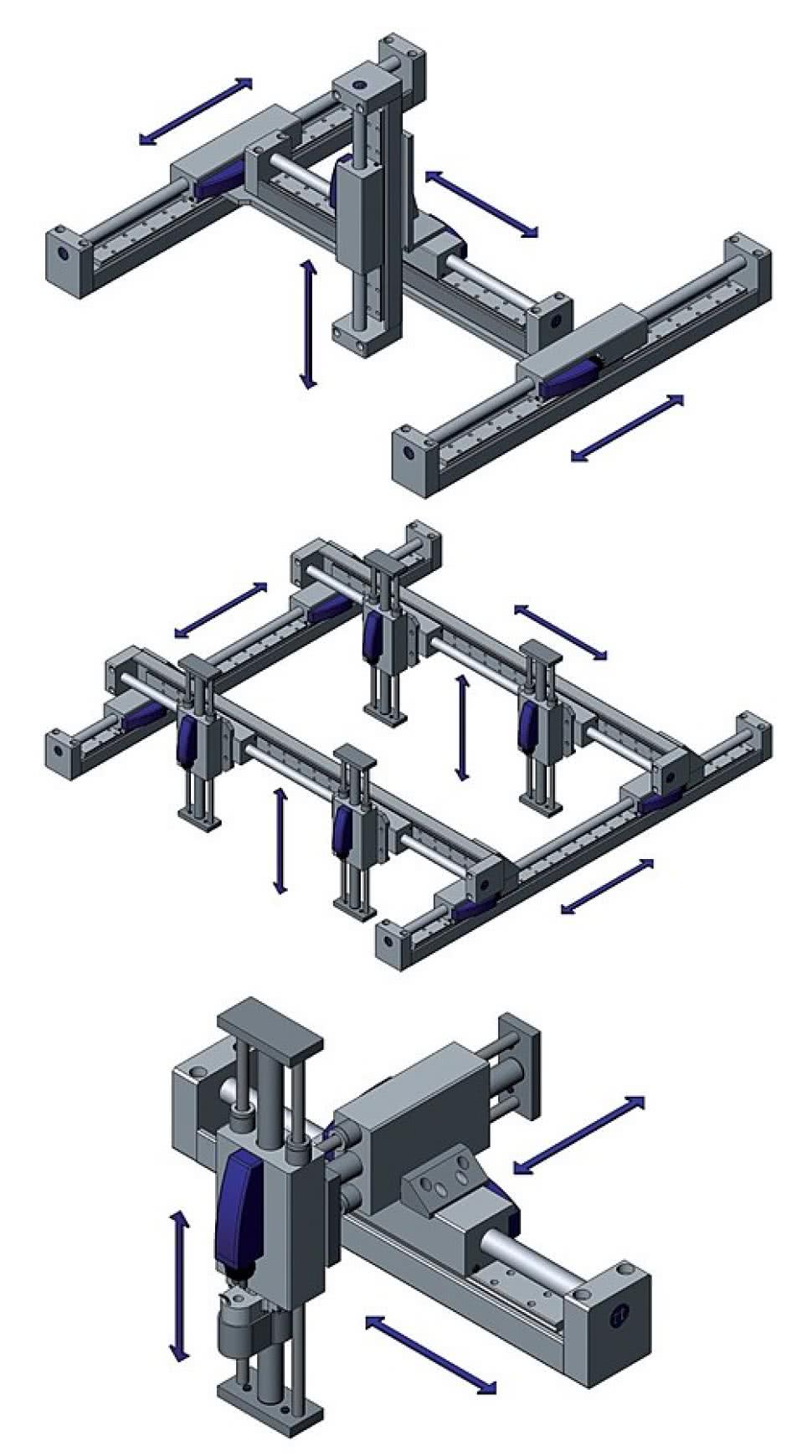
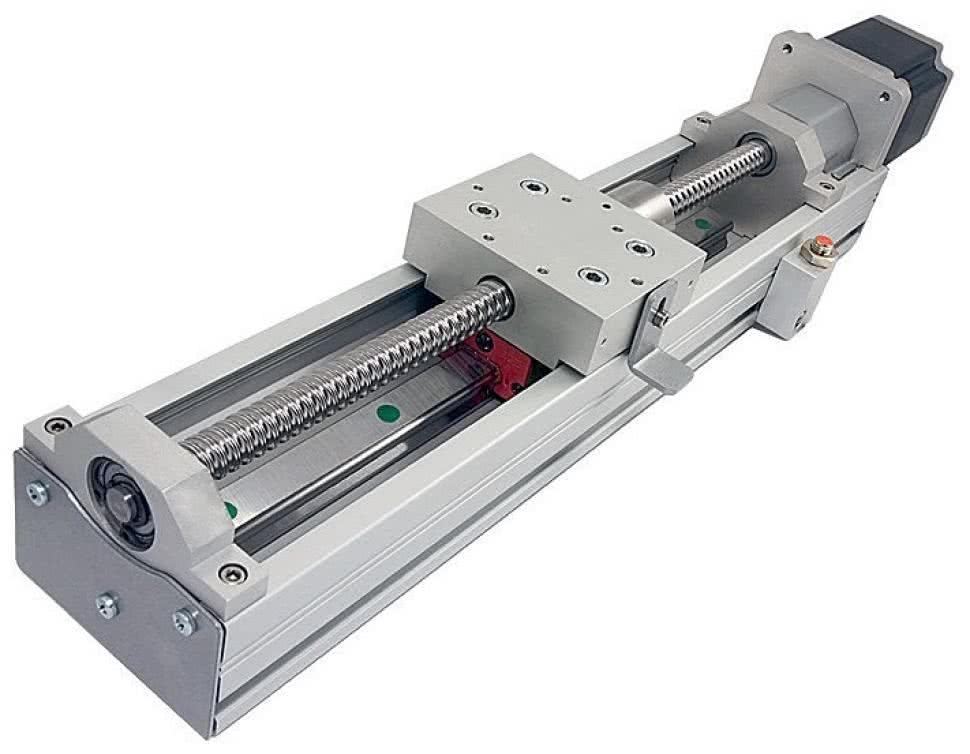
Fotografia 4. Przykładowe konfiguracje z modułami liniowymi
Innym rozwiązaniem w zakresie robotów kartezjańskich oferowanych przez WObit, są konstrukcje wykonane na bazie modułów liniowych MLA. Moduły zbudowane są z dedykowanego profilu aluminiowego, prowadnic liniowych i napędu który może być przenoszony przez pasek MLA bądź śrubą kulową MLAS (fot. 3). Do ich napędzania może być wykorzystany silnik krokowy, silnik szczotkowy i bezszczotkowy prądu stałego oraz serwonapęd. Najbardziej ekonomiczną wersją jest robot napędzany silnikami krokowymi. To niedrogie rozwiązanie gwarantujące dokładność i dynamikę wystarczającą w wielu aplikacjach (fot. 4). Tam, gdzie niezbędna jest większa precyzja, optymalnym rozwiązaniem jest wykorzystanie modułów MLAS z napędem przenoszonym przez śrubę kulową. W tym przypadku do napędzania zastosować można silnik serwo SMH60S o mocy nominalnej 400 W. Silnik o momencie znamionowym 1,27 Nm i prędkości obrotowej 3000 obr./min ma zintegrowany enkoder inkrementalny o rozdzielczości 2500 imp./obr. Sterowanie realizowane jest przez sterownik serwo z serii FD422 wyposażony w interfejsy RS232, RS485 lub CANopen. Sterowniki mogą pracować w kilku trybach: krok/kierunek (analogicznie do silników krokowych), kontroli prędkości, kontroli momentu, dojazdu do zadanej pozycji krańcowej.
Poza robotami kartezjańskimi WObit proponuje również robota SCARA własnej produkcji (fot. 5). Prototyp SCARA-R1 miał swoją premierę na ubiegłorocznych targach Automaticon. Obecnie wdrażana jest nowa konstrukcja, w której istnieje możliwość wyboru napędów (silniki krokowe lub serwonapędy), a co za tym idzie dynamiki ruchu robota. Zakres roboczy tego manipulatora wynosi 1000 mm a maksymalny udźwig to 5 kg. Istotnym elementem robota jest bezpłatne oprogramowanie, umożliwiające szybką konfigurację oraz zapamiętanie trajektorii ruchu maszyny. Dostarczane środowisko posiada intuicyjny interfejs, dzięki któremu nauka obsługi manipulatora jest szybka i prosta. Elastyczność manipulatora gwarantują przyłącze elektryczne oraz powietrze doprowadzone do drugiego ramienia robota, które umożliwiają podłączenie chwytaka pneumatycznego lub elektrycznego. Złącze elektryczne posiada możliwość podpięcia trzech sygnałów wejściowych 24 VDC do kontroli pozycji grippera.

Fotografia 5. Robot SCARA-R1
W zależności od potrzeb aplikacji, WObit do oferowanych robotów przemysłowych proponuje różnorodne elementy wykonawcze jakimi są chwytaki (fot. 6). Stanowią one w wielu aplikacjach niezbędne wyposażenie maszyny manipulacyjnej, które umożliwia realizację zadania transportowego w procesie produkcyjnym.
Budowa gripperów niemieckiej grupy Zimmer proponowanych przez WObit jest bardzo różnorodna, zależna od kształtu i materiału manipulowanego detalu, a także przeznaczenia robota. Na bogatą ofertę składają się chwytaki z napędem pneumatycznym, elektrycznym oraz hydraulicznym, w których przeniesienie napędu jest realizowane w różnorodny sposób, a także przyssawki.

Fotografia 6. Chwytaki firmy Zimmer: dwuszczękowe, trzyszczękowe i pneumatyczne
Pod względem układu wykonawczego chwytaki w ofercie WObit można podzielić na dwuszczękowe, trójszczękowe oraz wieloszczękowe, a także chwytaki obrotowe. Standardowo mają one otwarte na zabudowę końcówki chwytne i w zależności od potrzeb użytkownik sam dobiera odpowiednie nasadki, bądź wykonuje je we własnym zakresie. Grippery przystosowane są do montażu z różnych stron, dodatkowym ułatwieniem jest możliwość doprowadzenia medium (powietrza czy przyłącza elektrycznego) z kilku stron korpusu chwytaka.
Zróżnicowana oferta komponentów pozwala konstruktorom firmy WObit na tworzenie niestandardowych rozwiązań dopasowanych do potrzeb danej aplikacji. Od prostych modułów po wieloosiowe układy wykonawcze spełniające różnorodne funkcje począwszy od montażu i testowania elementów, przez operacje typu pick&place aż po sortowanie i paletyzację oraz depaletyzację detali. Więcej informacji można uzyskać na stronie www.wobit.com.pl oraz pod numerem 61 22 27 422.
P.P.H. WObit E. K. J. Ober s.c.
www.wobit.com.pl