Zaloguj
Zaloguj



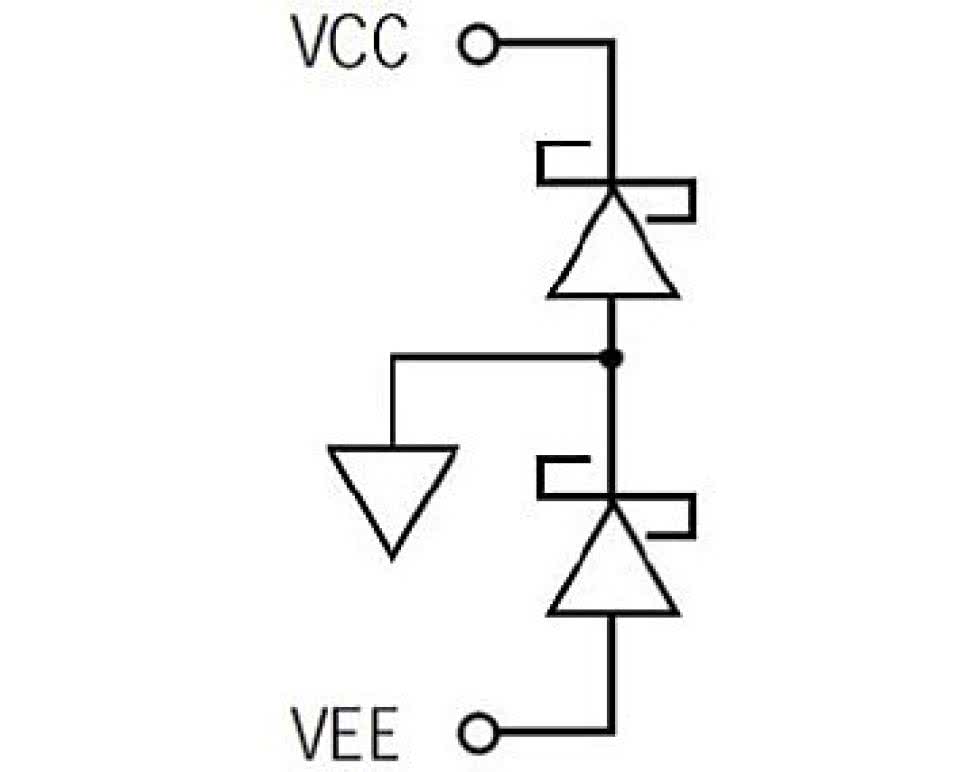
Rysunek 1. Obwód ochronny zbudowany z diod Schottky dla systemu zasilania dwoma napięciami o przeciwnej polaryzacji
W systemach zasilanych pojedynczym napięciem byłoby idealnie, gdyby po załączeniu napięcia wejściowego kształty napięć wyjściowych uzyskiwanych na wyjściach stabilizatorów różnego typu były takie same. Niestety nie może tak być, chociażby ze względu na różną wydajność prądową stabilizatorów, różnice konstrukcyjne oraz ich odmienną budowę, a także zmienny charakter obciążenia, chociażby ze względu na zależną od aplikacji liczbę kondensatorów filtrujących zasilanie.
W systemach zasilanych pojedynczym napięciem zwykle nie jest to problemem. W celu zapobieżenia ewentualnym wynikającym z tego problemom stosuje się rodzaj komparatora napięcia, który generuje sygnał zezwalający na start podzespołów dopiero po osiągnieciu przez napięcie zasilające pewnej ustalonej wartości.
Zwykle nieskomplikowane, typowe układy wzmacniaczy zasilane napięciem symetrycznym są niewrażliwe na kolejność (sekwencję) pojawiania się napięć zasilających, ale nie jest to regułą. Przekonałem się o tym budując wzmacniacz audio zasilany napięciem symetrycznym, w którym około dwu- lub trzysekundowa różnica pomiędzy pojawieniem się napięć zasilających spowodowała uszkodzenie stopnia mocy.
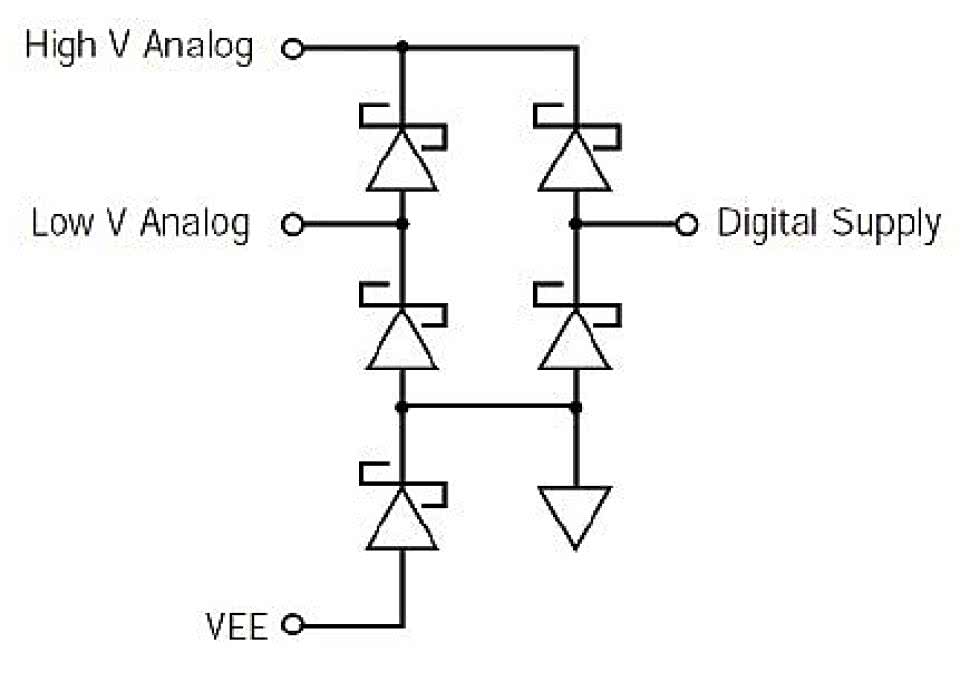
Rysunek 2. Nieskomplikowany obwód zabezpieczający przeznaczony do obwodów zasilanych wieloma napięciami
Może więc zdarzyć się sytuacja, w której również w takich prostych obwodach konstruktor będzie zmuszony zadbać o poprawną kolejność załączania napięć i/lub kontrolować ich wartość. Zwykle jednak układy wzmacniaczy nie mają połączenia z masą innego, niż przez rezystory polaryzujące o rezystancji co najmniej kilkunastu - kilkudziesięciu kiloom, więc po załączeniu płynie przez nie niewielki prąd, który ma małą szansę na spowodowanie uszkodzenia wrażliwych obwodów półprzewodnikowych.
Jednak bardziej złożone układy scalone mogą być zasilane wieloma napięciami, w tym również o różnej polaryzacji oraz mają wyprowadzenia bezpośrednio połączone z masą, co może spowodować przepływ nadmiernego prądu w niezamierzony sposób, gdy napięcia zasilające pojawiają się w nieprawidłowej kolejności. Dzieje się tak, ponieważ zgodnie z zamierzeniami projektantów struktury układu scalonego, prąd powinien przepływać od napięcia dodatniego do napięcia ujemnego, a nie od któregoś z nich do masy.
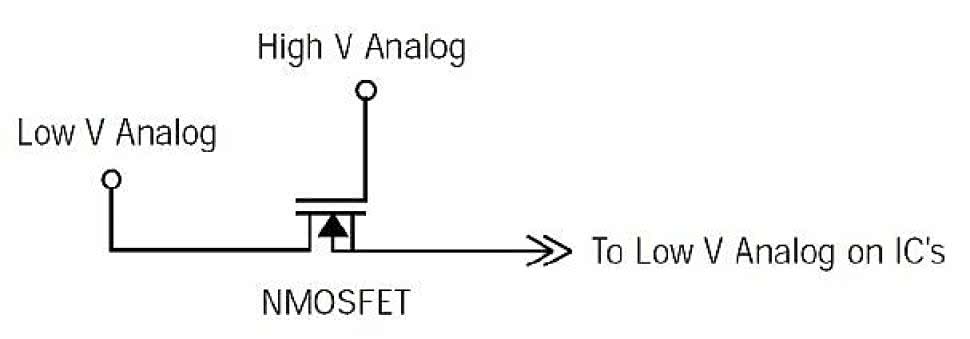
Rysunek 3. Tranzystor MOSFET włączony w układzie zezwalającym na załączenie niskiego napięcia po wystąpieniu wysokiego
Po załączeniu napięć zasilających, jeśli jedno z nich pojawi się wcześniej niż drugie, prąd będzie "próbował" płynąć zgodnie z zamierzeniami konstruktorów, ale nie będzie to możliwe, ponieważ odpowiednie napięcie jeszcze nie będzie załączone. Jeśli impedancja wyjściowa jeszcze niedziałającego zasilacza (stabilizatora) jest niewielka, to prąd może wypływać z lub wpływać do jego wyjścia i wówczas nie powinno być problemu, bo zasilany układ scalony zwykle może "poczekać" na pojawienie się drugiej połówki napięcia.
Niestety, zwykle wyjścia większości stabilizatorów napięcia pozostają w stanie wysokiej impedancji, jeśli ten nie osiągnie znamionowych warunków pracy. I dlatego, jeśli tylko jedno ze źródeł napięnapięcia zasilacza symetrycznego jest aktywne, to przepływ prądu w normalnym kierunku zostaje zablokowany, a napięcie na wyprowadzeniu stabilizatora pozostającym w stanie wysokiej impedancji ma tendencję do podążania w stronę funkcjonującego źródła napięcia, co odwraca polaryzację wewnętrznych obwodów układu scalonego w odniesieniu do wyprowadzenia masy.
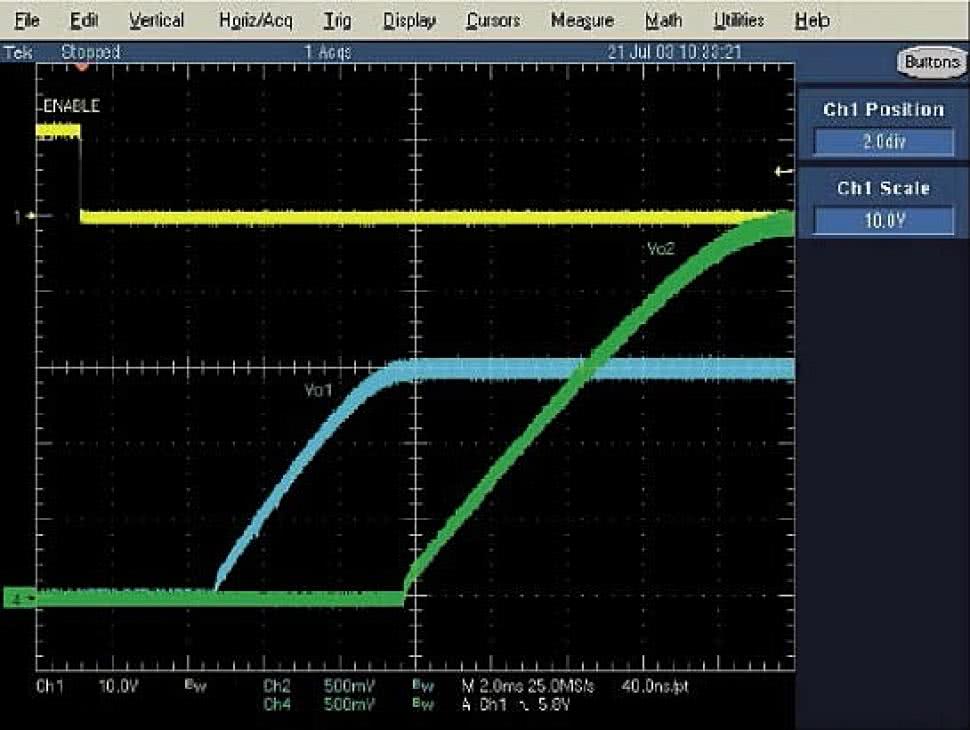
Rysunek 4. Oscylogram dwóch napięć zasilających dla załączenia sekwencyjnego, jedno po drugim |

Rysunek 5. Przy sekwencji proporcjonalnej wszystkie napięcia zasilające osiągają punkt regulacji w tym samym czasie |
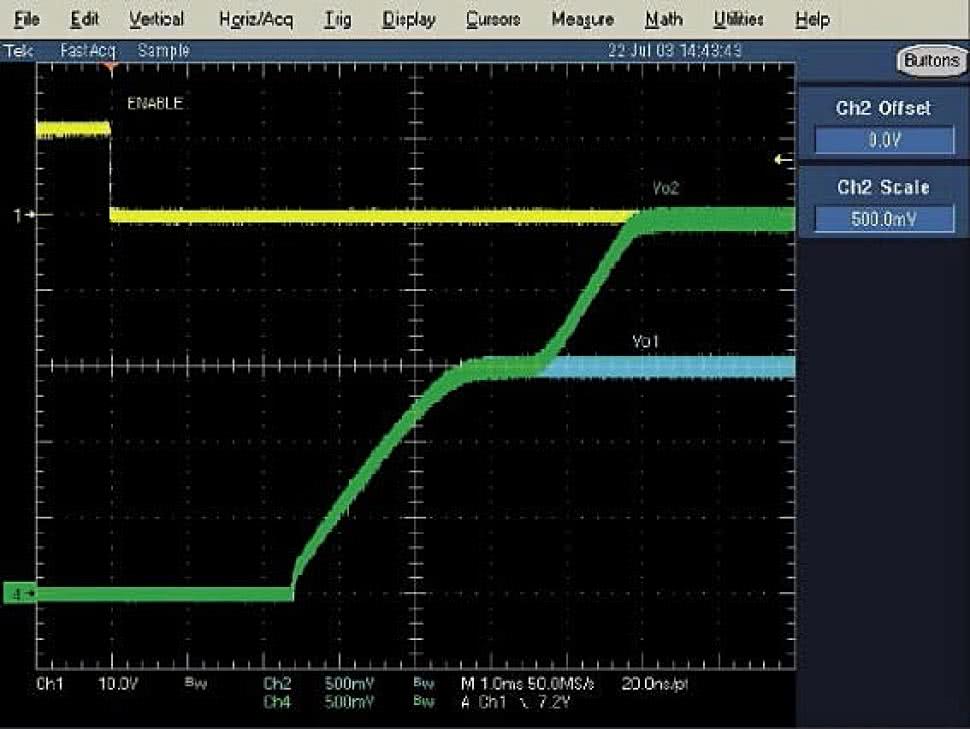
Rysunek 6. Przy sekwencji jednoczesnej zbocza napięć zasilających są nachylone pod tym samym kątem. "Schodek" na oscylogramie jest wynikiem działania konkretnego układu scalonego - nie jest wymagany w tej technice sekwencjonowania napięć zasilających |
W wielu wypadkach w takiej sytuacji wewnętrzne złącza zostają spolaryzowane w kierunku przewodzenia, a prąd przepływa przez nie w kierunku masy. W związku z tym, że jest to zupełnie niezamierzona i często przypadkowa droga przepływu prądu, to może on spowodować zjawisko prądu lawinowego i przepalenie złącza lub co najmniej narażenie go na przeciążenia powodujące skrócenie czasu funkcjonowania układu lub uszkodzenie.
Systemy zasilane dwoma napięciami o przeciwnej polaryzacji
W systemach zasilanych pojedynczym napięciem dodatnim i pojedynczym ujemnym istnieje nieskomplikowany sposób zapobieżenia opisywanym problemom. Polega on na uniemożliwieniu występowania odwrotnej polaryzacji źródeł za pomocą nieskomplikowanego obwodu zbudowanego z komponentów dyskretnych.
Schemat obwodu, o którym mowa pokazano na rysunku 1. Jest on zbudowany z diod Schottky włączonych w obwód zasilania, który załączy się wcześniej, niż złącza krzemowe wewnątrz chronionego obwodu scalonego i dzięki temu będzie on przewodził znaczącą część prądu. Diody Schottky zastosowane w tym obwodzie muszą mieć niewielkie napięcie progowe w najgorszym przypadku prądu zasilania.
Na przykład, jeśli ten typ zabezpieczenia zastosowano do ochrony 8-wyjściowej karty I/O, w której każde wyprowadzenie może przewodzić prąd rzędu 200 mA, wówczas diody Schottky użyte w zabezpieczeniu muszą gwarantować napięcie progowe rzędu 0,5 V przy prądzie 1,6 A. W większości wypadków taki prąd nigdy nie popłynie, ponieważ maksymalny prąd obciążenia drivera I/O jest podawany przy znamionowym napięciu wyjściowym (tj. w normalnych warunkach zasilania), jednak stosowanie komponentów przewidzianych do pracy w najgorszych warunkach jest dobrą praktyką konstruktorską i daje pewien margines bezpieczeństwa. Tym bardziej, że diody Schottky - nawet te dla dużych prądów - nie kosztują zbyt wiele, więc nie warto ponosić ryzyka w celu osiągnięcia pozornych oszczędności.
Obwód zabezpieczający pokazany na rysunku 1 powinien być stosowany dla źródła zasilania, bardziej niż odrębnie dla każdego komponentu i jest przeznaczony do systemów, w których napięcia zasilające mogą załączyć się w kolejności przypadkowej. Jeśli zasilacz został tak zaprojektowany, że jedno z napięć zawsze występuje pierwsze, to odpowiadająca mu dioda Schottky jest zbędna. Z drugiej strony, zastosowanie dwóch diod chroni układy, jeśli jeden ze stabilizatorów ulegnie uszkodzeniu.
Systemy zasilanie wieloma napięciami
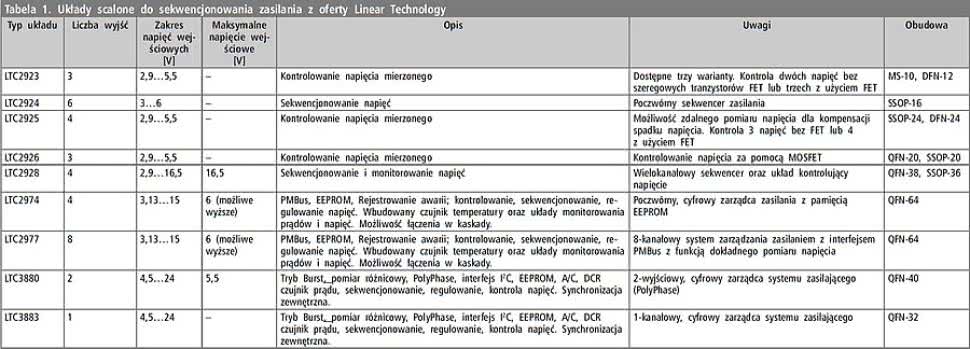
Tabela 1. Układy scalone do sekwencjonowania zasilania z oferty Linear Technology
Współczesne układy elektroniczne, zwłaszcza wykonane w technice mieszanej analogowo - cyfrowej, często wymagają więcej niż jednego napięcia zasilającego. Może to być na przykład pojedyncze napięcie rzędu 1,8...2,5 V do zasilania rdzenia CPU, kolejne rzędu 2,7...5 V do zasilania portów I/O oraz dwa napięcia np. ±15 V do zasilania układów analogowych.
Niekiedy zdarza się też, że część analogowa wymaga trzech lub czterech napięć znacznie różniących się od siebie wartością, a przy tym i polaryzacją. W takiej sytuacji konstruktor, po pierwsze, powinien zatroszczyć się o zachowanie poprawnej polaryzacji napięć w każdych warunkach, zarówno w odniesieniu napięć do siebie, jak i do masy oraz o właściwą kolejność ich załączania i wyłączania.
Wbrew pozorom problem może być dosyć złożony i zależy od właściwości zastosowanych układów scalonych. Na przykład, jeśli układ analogowy jest zasilany dwoma napięciami, jednym wyższym i drugim niższym, wtedy napięcie niższe w żadnej sytuacji nie powinno być większe od wyższego (wystąpi wtedy odwrotna polaryzacja obwodu!), nawet w bardzo krótkim przedziale czasu. Również niskie napięcie zasilające obwody cyfrowe nie może pojawić się wcześniej, niż wysokie napięcie zasilające obwody analogowe. Co prawda, niektóre komponenty tolerują pojawienie się napięcia zasilającego część cyfrową przed napięciem zasilającym część analogową, ale nie jest to regułą.
Jednym ze sposobów zasilania takich układów scalonych jest zastosowanie rozwiązania układowego, w którym napięcia są załączane oraz wyłączane w określonej i zamierzonej sekwencji. Tę technikę zasilania wieloma napięciami nazywa się sekwencjonowaniem napięć, natomiast układy scalone umożliwiające uzyskanie poprawnej sekwencji załączania i wyłączania napięć zasilających - sekwencerami napięć zasilających.
W celu uzyskania poprawnej sekwencji można posłużyć się obwodem zbudowanym z diod Schottky, pokazanym na rysunku 2. Nie zastąpi on wyspecjalizowanego układu scalonego, który oprócz załączania i wyłączania zasilania może realizować również inne funkcje, ale na pewno jest tani i nieskomplikowany. Prąd przewodzenia diod powinien być szacowany podobnie, jak w poprzednim wypadku, odnoszącym się do rysunku 1.
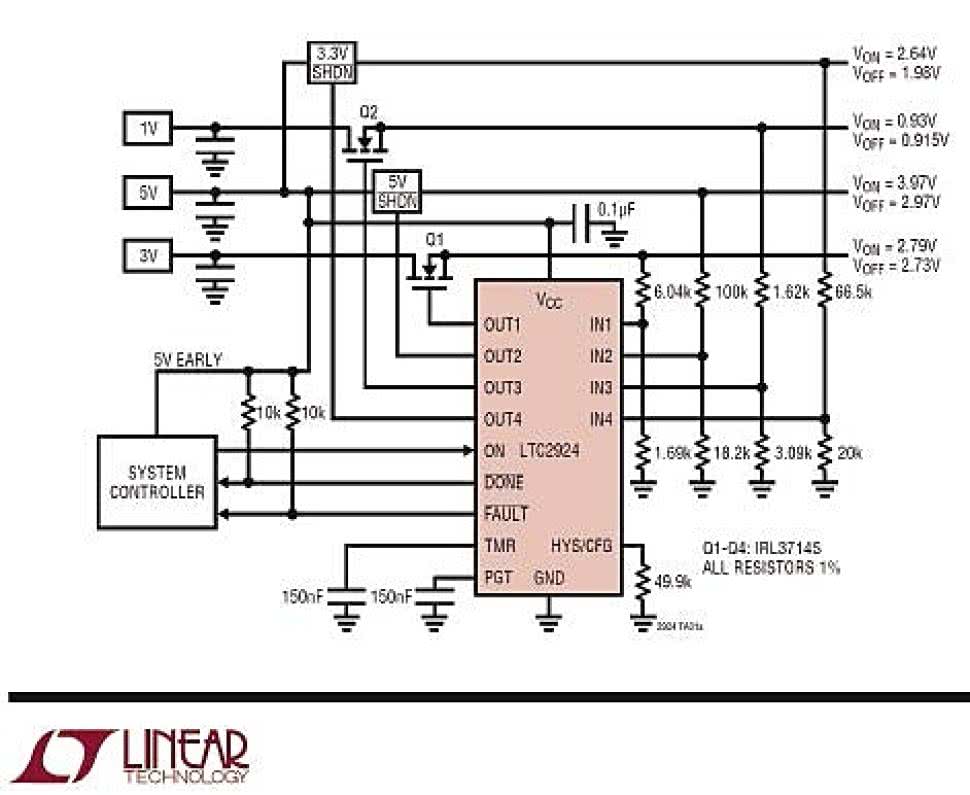
Rysunek 7. Podstawowa aplikacja układu LTC2924
Problemem może stanowić sytuacja, w której źródło niższego napięcia nie ma wystarczającej wydajności prądowej, aby zasilić obwody zasilane ze źródła wyższego napięcia. W takiej sytuacji można użyć tranzystora MOSFET włączonego w sposób pokazany na rysunku 3.
Ten obwód włączony szeregowo z doprowadzeniem zasilania może być używany do zabezpieczenia przed włączeniem niższego napięcia przed wystąpieniem wyższego. Aby układ pracował poprawnie rezystancja przewodzenia tranzystora MOSFET RDS(on) musi być wystarczająco niska przy napięciu UGS występującym pomiędzy niskonapięciową i wysokonapięciową częścią obwodu i przy maksymalnym prądzie, który popłynie przez kanał tranzystora. Trzeba też mieć na uwadze, że jeśli różnica napięć pomiędzy drenem a źródłem nie jest zbyt wysoka, to należy użyć tranzystora o niskim napięciu bramki.
Nieskomplikowane obwody nie zawsze są jednak w stanie sprostać wymaganiom aplikacji. W takich sytuacjach używa się wspomnianych wcześniej układów scalonych sekwencerów zasilania. Mogą one załączać zasilacze, stabilizatory, przetwornice DC/DC, tranzystory klucze i inne. Zanim jednak zastosuje się odpowiedni układ scalony lub obwód sekwencjonujący, trzeba poznać podstawowe sposoby załączania napięć zasilających. Rozróżniamy trzy metody:
Sekwencyjną (sequential), gdy napięcia są załączane jedno po drugim, w określonej kolejności (rysunek 4). Na przykład, napięcie rdzenia, który powinien być zasilony przed włączeniem układów peryferyjnych i przetworników A/C. Przy wyłączeniu napięcia zwykle kolejność zanikania napięć powinna być odwrotna.
Proporcjonalną (ratiometric), gdy wszystkie napięcia zasilające osiągają wartość znamionową w tym samym czasie (rysunek 5). Zbocza napięć pokazane na oscylogramie mają różne czasy narastania, tak aby punkt regulacji został osiągnięty w przybliżeniu w tym samym czasie. Po wyłączeniu napięcia głównego zbocza opadające obu napięć mają różne nachylenia, tak aby napięcia zasilające osiągnęły poziom masy w przybliżeniu w tym samym czasie.
Jednoczesną (simultaneous), gdy zbocza narastające wszystkich napięć zasilających są nachylone pod tym samym kątem (rysunek 6). Na przykład, po tym jak napięcie zasilające rdzenia osiągnie wartość nominalną, to napięcie zasilające układy peryferyjne nadal rośnie z tym samym nachyleniem zbocza i osiąga po pewnym czasie swój punkt regulacji. Kolejność jest odwracana przy wyłączeniu zasilania.
Danych na temat wymaganej sekwencji napięć zasilających należy szukać w karcie katalogowej danego procesora czy układu FPGA. Na ich podstawie można wybrać właściwy układ scalony i za jego pomocą skonstruować odpowiedni obwód zasilający.
Układy scalone sekwencerów napięć zasilających
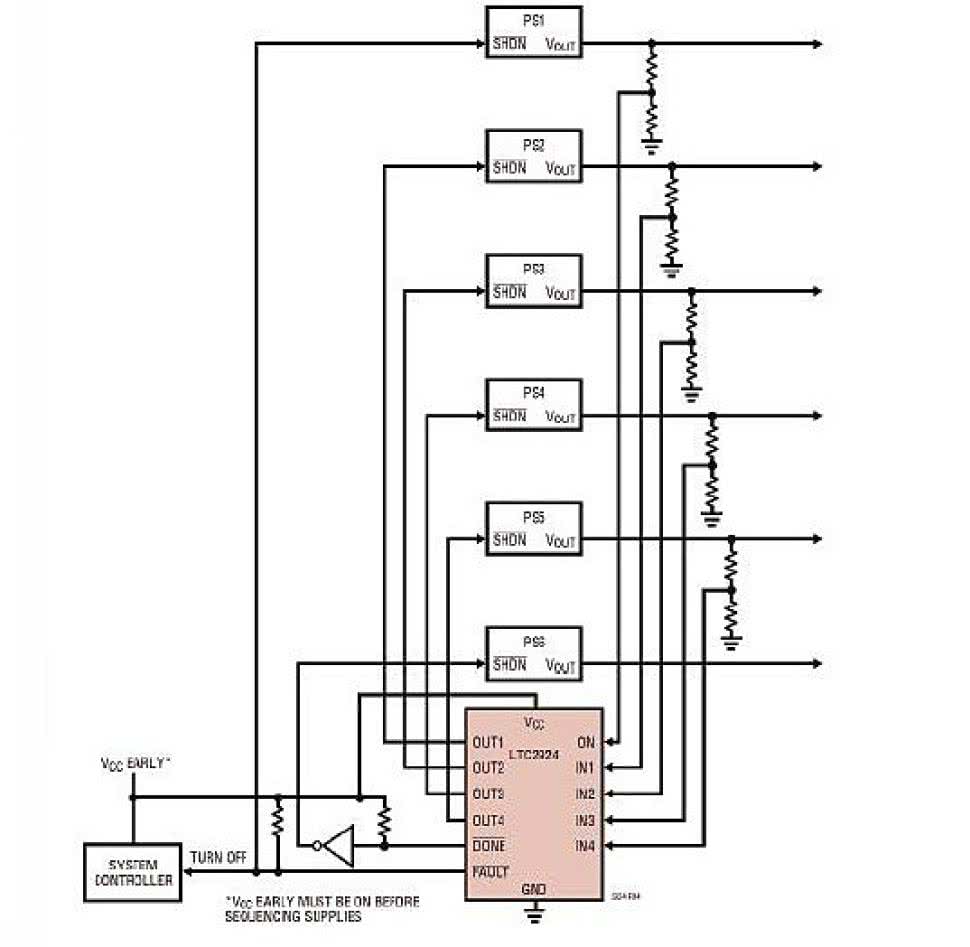
Rysunek 8. Układ LTC2924 sterujący 6 napięciami zasilającymi
Jak wspomniano, pomimo możliwości zbudowania sekwencera z użyciem komponentów dyskretnych, najwygodniejszą metodą zbudowania obwodu dbającego o odpowiednią sekwencję załączania i/lub wyłączania napięć zasilających jest zastosowanie specjalizowanego układu scalonego. Są one wytwarzane praktycznie przez każdego większego producenta układów scalonych i są dostępne w ofercie ich krajowych i międzynarodowych firm dystrybucyjnych.
Dokonajmy skróconego przeglądu ich możliwości opisując dokładniej dwóch - trzech przedstawicieli z oferty każdego z większych producentów. W ramach tego artykułu zasygnalizujemy ich możliwości, ponieważ nie sposób pokazać pełnej oferty firm, w której są zarówno proste układy o sekwencjach programowanych za pomocą komponentów zewnętrznych, jak skomplikowane, wielofunkcyjne, programowane za pomocą zewnętrznego układu hosta, np. mikrokontrolera.
Linear Technology
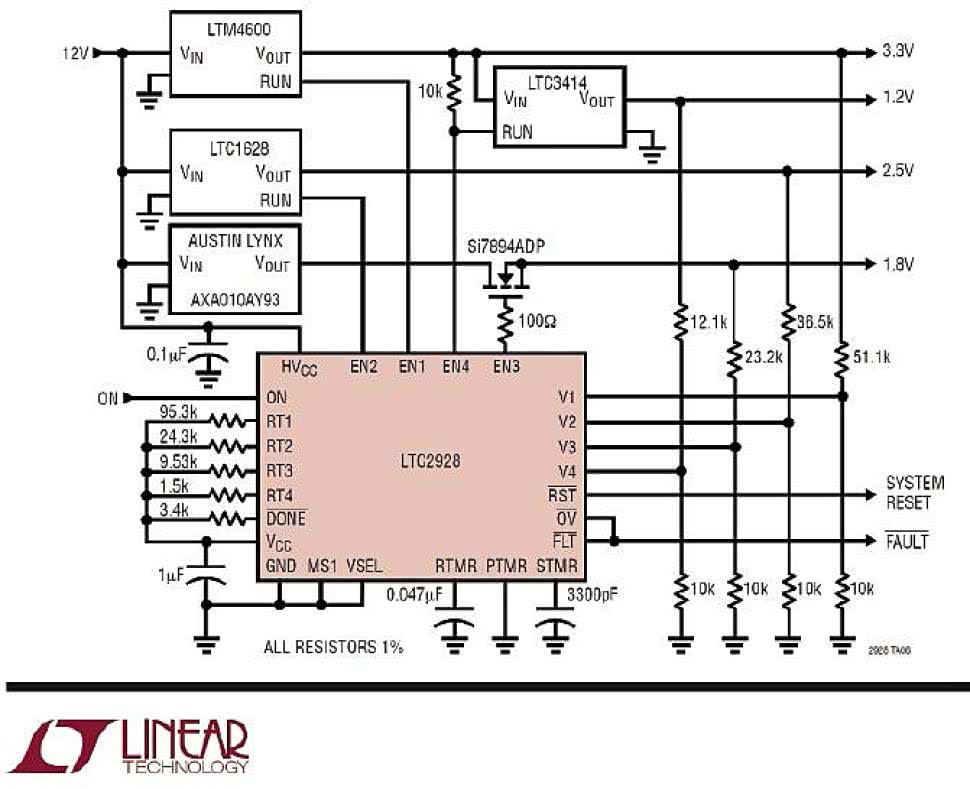
Rysunek 9. Podstawowa aplikacja układu LTC2984
Przegląd oferty układów produkowanych przez Linear Technology umieszczono w tabeli 1.
Pokazany na rysunku 7 układ LTC2924 został opracowany do sterowania kluczami tranzystorowymi zbudowanymi w oparciu o MOSFET'y z kanałem N lub układy scalone stabilizatorów z wejściami załączającymi. Układ może bezpośrednio sterować 4 kanałami zasilacza, ale można za jego pomocą zbudować zasilacz o maksymalnej liczbie 6 kanałów zasilających (rysunek 8).
LTC2924 wymaga niewielkiej liczby komponentów zewnętrznych, jedynie dwóch rezystorów sprzężenia zwrotnego na pojedynczy, kontrolowany kanał oraz jednego rezystora do ustalenia histerezy. W strukturę wbudowano przetwornicę (pompa ładunku) generującą napięcie dla zewnętrznych układów logicznych i do załączania MOSFET'ów. Regulowanie odstępu czasowego pomiędzy załączeniem napięcia zasilającego i początkiem sekwencji osiąga się za pomocą pojedynczego kondensatora dołączonego do wejścia TMR.
Drugi kondensator ustala opóźnienie zadziałania detektora poprawności napięcia wyjściowego danego kanału zasilającego. Błędy napięcia oraz błędy sekwencji napięć są sygnalizowane za pomocą wyjścia FAULT. Komparatory wbudowane w układ mają dokładność 1%. Układy LTC2924 mogą być łączone w kaskady w celu sterowania większą liczbą kanałów.
Innym przedstawicielem układów do sekwencjonowania napięć zasilających jest 4-kanałowy LTC2984. Jego podstawową aplikację pokazano na rysunku 9. Układ może pełnić nie tylko rolę układu sekwencjonującego, ale również nadzorcy poprawności napięcia zasilającego oraz może generować sygnał zerowania systemu lub mikroprocesora.
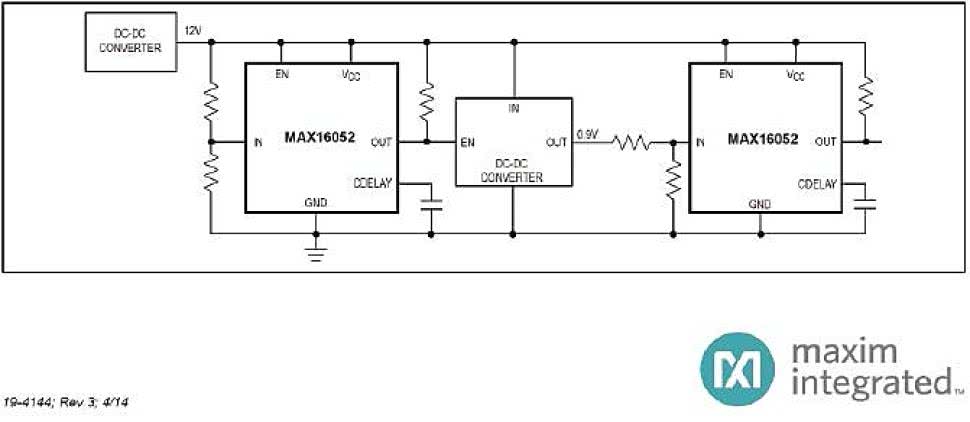
Rysunek 10. Podstawowa aplikacja układu MAX1652
Podobnie jak poprzedni układ, również i ten może być łączony w kaskady w celu zwielokrotnienia liczby kanałów. Do poprawnej pracy układ wymaga jedynie kilku komponentów zewnętrznych, co zmniejsza zajmowaną powierzchnię płytki drukowanej i ma ogromne znaczenie na przykład dla płyt głównych komputerów PC. Wyjścia układu mogą sterować wejściami zezwalającymi stabilizatorów lub bramkami tranzystorów MOSFET z kanałem N.
Dokładność pomiaru napięcia wynosi 1,5%. Funkcje dozoru napięcia zasilającego zawierają monitorowanie, sygnalizowanie błędu oraz generowanie sygnału zerującego, zarówno przy zbyt niskim, jak i zbyt wysokim napięciu kontrolowanym. Inną ciekawą możliwością układu jest wyłączenia wszystkich kontrolowanych źródeł napięcia za pomocą sygnału generowanego wewnętrznie lub zewnętrznie. Typ oraz źródło błędu są dostępne i mogą być wykorzystane np. przez funkcje diagnostyczne. Wejście wysokiego napięcia może być zasilane napięciem 16,5 V, co pozwala na zastosowanie LTC2924 nie tylko na płytach głównych komputerów.
Maxim-Dallas
Firma Maxim Integrated oferuje ogromną liczbę układów, od nieskomplikowanych do bardzo rozbudowanych, programowanych za pomocą interfejsu szeregowego. W jej ofercie można znaleźć układy kontrolujące 1, 2, 3, 4, 6, 8, 12 lub 16 kanałów (tabela 2). Oczywiście, sekwencjonowanie pojedynczego kanału rzadko ma sens, wiec takie układy można łączyć w kaskady, które mogą stertować praktycznie nieograniczoną liczbą źródeł napięcia zasilającego.
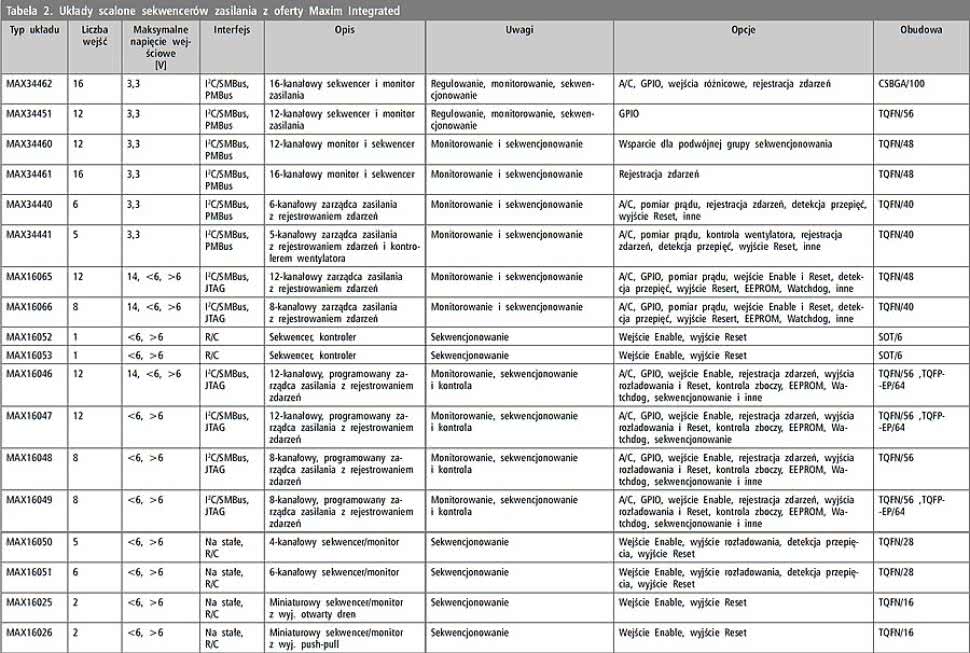
Tabela 2. Układy scalone sekwencerów zasilania z oferty Maxim Integrated |
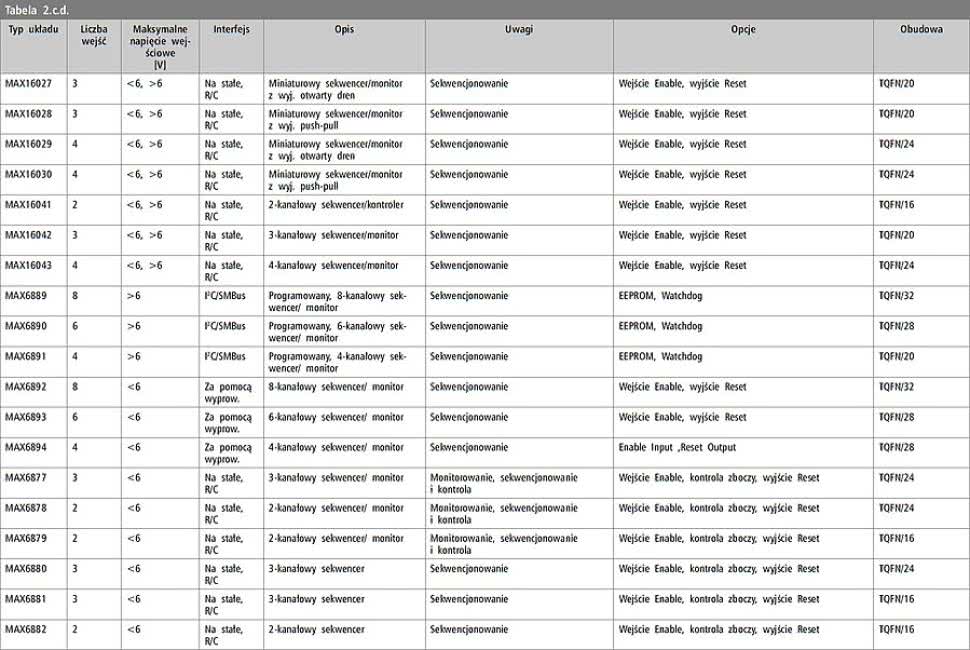
Tabela 2.c.d. |

Tabela 2.c.d. |

Rysunek 11. Podstawowa aplikacja układu MAX34462
Przykładem układów sekwencjonujących, 1-kanałowych są MAX1652 z wyjściem typu otwarty dren i bliźniaczy MAX1653 mający wyjście push-pull. Podstawową aplikację układu MAX1652 pokazano na rysunku 10. Oba układy należą do rodziny niewielkich układów monitorowania napięcia zasilającego z możliwością budowania sekwencjonowania źródeł napięcia zasilającego.
Umieszczone w miniaturowych obudowach układy są elastyczne, mają możliwość regulowania progu i czasu opóźnienia zadziałania za pomocą komponentów zewnętrznych. Są one idealne do zastosowania w aplikacjach sekwencjonowania napięć, sygnałów zerujących oraz zasilaczach wielonapięciowych. Jak wspomniano, układy mogą być łączone w kaskady dla potrzeb bardziej rozbudowanych aplikacji.
Wejście pomiarowe o dużej impedancji (IN) z progiem wyzwolenia 0,5 V (dokładność 1,8%) pozwala na ustalenie progu zadziałania za pomocą zewnętrznego dzielnika rezystancyjnego. Wyjście (OUT) jest ustawione, gdy napięcie wejściowe przewyższa o 0,5 V ustalony próg. Gdy napięcie wejściowe jest niższe o 0,495 V lub gdy wejście ENABLE ma poziom niski, wyjście układu również zostaje wyzerowane.
Opóźnienie od wystąpienia warunku zadziałania do zmiany sygnału wyjściowego jest programowane za pomocą kondensatora. Wyjście układu MAX16052 jest typu otwarty dren, natomiast MAX1652 jest typu push-pull. Oba układy scalone pracują w zakresie napięcia zasilającego 2,25...28 V i mają wejście ENABLE. Są oferowane w miniaturowych obudowach SOT-23 mających 6 wyprowadzeń i mogą pracować w zakresie temperatury -40°C...+125°C.

Tabela 3. Układy sekwencerów z oferty Texas Instruments
Na rysunku 11 pokazano podstawową aplikację innego układu - MAX34462. Jest on bardzo rozbudowany i może monitorować lub sekwencjonować aż 16 napięć lub prądów za pomocą wejść różnicowych. Układ stale mierzy napięcia wejściowe i sprawdza czy mieszczą się one w dopuszczalnych granicach. Jeśli wystąpi błąd, to układ wyłącza system zasilania w ustalony sposób.
MAX34462 może włączać i wyłączać napięcia wyjściowe w dowolnie zaprogramowanej kolejności. Układ zawiera 16 niezależnych przetworników C/A, które cyfrowo ustalają kształty napięć w poszczególnych kanałach wyjściowych. Jak przystało na układ zabezpieczający zasilanie, MAX34462 zawiera czujnik temperatury i oprócz tego można do niego dołączyć aż 4 dodatkowe czujniki zewnętrzne.

Rysunek 12. Typowa aplikacja układu UCD90124A
Po skonfigurowaniu układ funkcjonuje autonomicznie i nie wymaga żadnej interwencji układu hosta. Komunikacja ze "światem zewnętrznym" odbywa się za pomocą interfejsu szeregowego kompatybilnego z I²C i SMBus. Za jego pomocą układ nie tylko odbiera nastawy, ale również przesyła informacje o monitorowanych napięciach. Stan układu jest kontrolowany za pomocą interfejsu kompatybilnego z PMBus. Nastawy domyślne są zapisywane we wbudowanej w strukturę pamięci nieulotnej.
Co ważne dla niektórych aplikacji, układ ma 16 wejść cyfrowych i 36 wyjść dołączonych do funktorów logicznych, do dowolnego wykorzystania przez użytkownika. Układy mogą być łączone równolegle, co zwiększa i tak bardzo dużą liczbę kontrolowanych kanałów, ale można w ten sposób budować obwody monitorujące napięcia i prądy. Układ nie wymaga zewnętrznego sygnału zegarowego, a zakres napięcia zasilającego rozciąga się od 3,0 V do 3,6 V
Texas Instruments
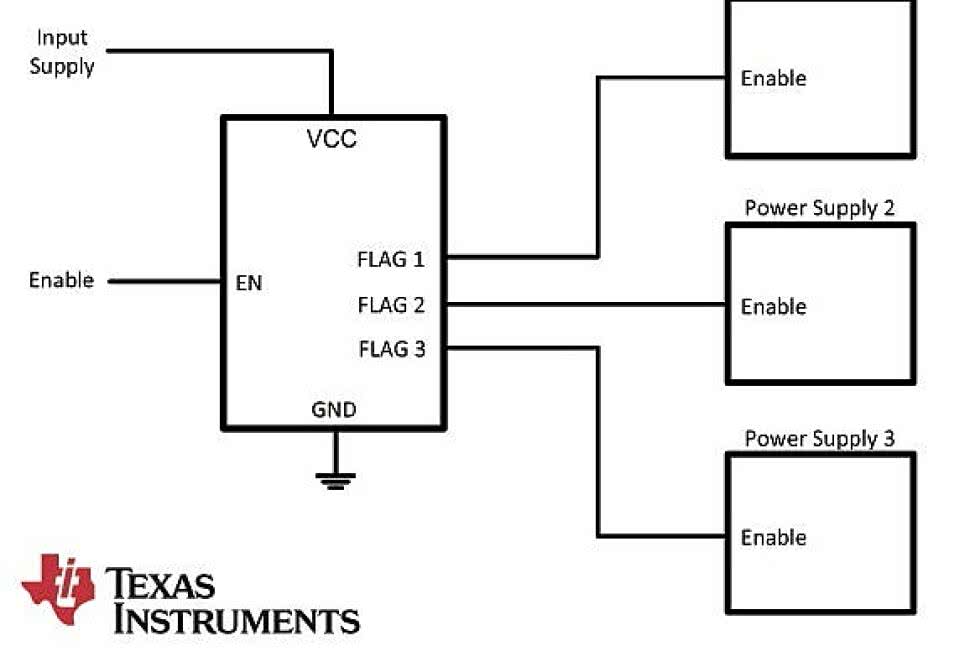
Rysunek 13. Typowa aplikacja układu LM3880
Firma Texas Instruments oferuje sporą liczbę układów scalonych służących do monitorowania i ustalania sekwencji napięć zasilających. W jej ofercie znajdziemy zarówno nieskomplikowane układy w obudowach SOT-23, jak również rozbudowane, przeznaczone do zastosowania na płytach głównych komputerów lub w motoryzacji, mające wsparcie dla funkcji ACPI oraz mogące sterować wentylatorami chłodzącymi zasilane komponenty. Przykładem takiego układu jest UCD90124A - jego aplikację pokazano na rysunku 12.
Układ UCD90124A jest 12-kanałowym monitorem/sekwencerem napięcia lub prądu wyposażonym w interfejsy PMBus oraz I²C. W jego strukturze umieszczono 12-bitowy przetwornik A/C, który służy do monitorowania 12 wejść napięcia. 26 linii GPIO może być użytych do załączania źródeł napięcia, generowania sygnałów zerowania i/ lub przerwań, łączenia układów w kaskady lub innych funkcji potrzebnych w aplikacji. 12 z tych linii ma funkcjonalność PWM. Dzięki temu UCD90124A może sterować silnikami wentylatorów, precyzyjnie "dostrajać" kontrolowane napięcie lub realizować inne funkcje, do których typowo znajduje zastosowanie PWM. Zakres częstotliwości wynosi 15,259 kHz...125 MHz.
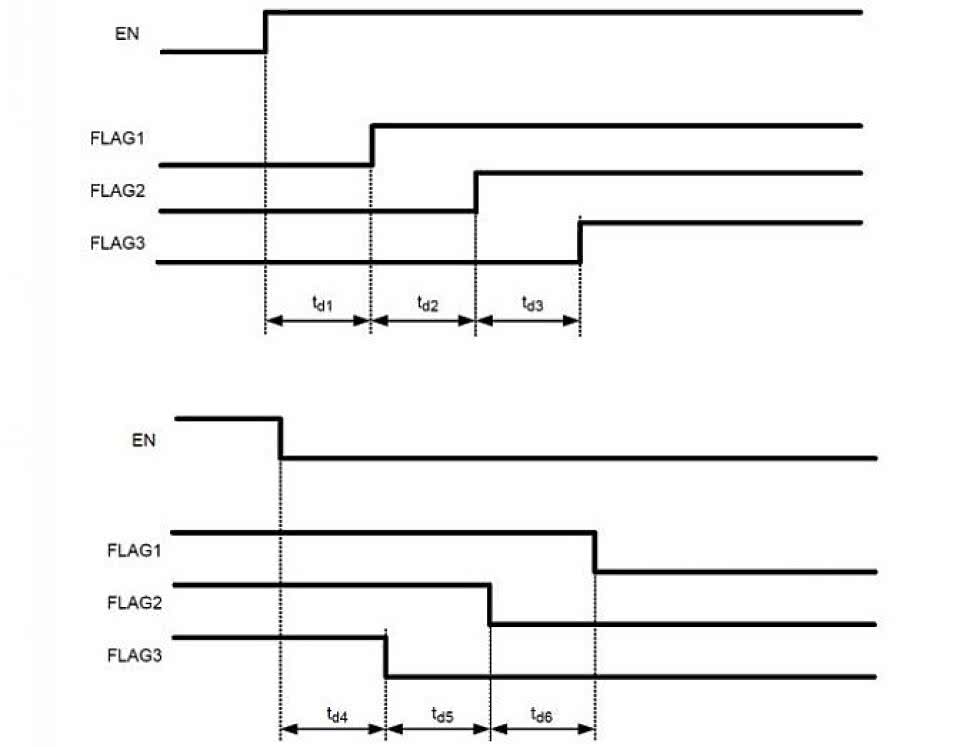
Rysunek 14. Sekwencje sygnałów dostępne na wyjściu LM3880: a) podczas załączania, b) podczas wyłączania
Ciekawą funkcją układu jest możliwość uzyskania specyficznych stanów wyjść sterujących dołączonymi źródłami zasilania za pomocą trzech wejść GPIO. Ta funkcjonalność nosi nazwę Pin-Selected Rail States i pozwala na sprzętowe załączenie lub wyłączenie dowolnego wyjścia sterującego. Funkcja przydaje się przy realizowaniu trybów niskiego poboru energii zgodnie ze specyfikacji ACPI (Advanced Configuration and Power Interface).
Do konfigurowania układu służy autorskie oprogramowanie TI Fusion Digital Power mające intuicyjny interfejs graficzny umożliwiający konfigurowanie układu, zapamiętywanie konfiguracji oraz monitorowanie wszystkich parametrów systemu. Maksymalne napięcie, które może być monitorowane i sterowane wynosi 12 V.
Pomiary są wykonywane przez wspomniany wcześniej przetwornic A/C co 400 ms. Układ nie wymaga dołączenia zewnętrznego źródła napięcia referencyjnego. Generowane sekwencje napięć mogą być zależne od czasu, stanu innych wyjść lub sterowane za pomocą wejść GPIO. W związku z przeznaczeniem do systemów mikroprocesorowych układ wyposażono w programowany timer Watchdog oraz interfejsy JTAG i I²C/SMBus/ PMBus.

Rysunek 15. Analogowy, 4-kanałowy układ sekwencjonujący ADM1186
Niejako na przeciwległym biegunie jest nieskomplikowany w aplikacji układ LM3880, niewymagający hosta do sterowania, umieszczony w niewielkiej, 6-wyprowadzeniowej obudowie SOT-23. Układ ma co prawda skromne możliwości, ponieważ nie ma funkcji monitorowania i sygnały wyjściowe pojawiają się w pewnych odstępach czasowych, niezależnie od tego, czy napięcie załączane jest obecne, czy też nie. Taką dodatkową kontrolę trzeba dobudować sobie "na zewnątrz" wykorzystując w tym celu wejście ENABLE do sterowania załączanymi zasilaczami.
Typową aplikację tego układu pokazano na rysunku 13. Co ciekawe, pomimo miniaturowej obudowy układ ma aż trzy wyjścia, które są załączane i wyłączane zgodnie z sekwencją wybraną w pamięci EEPROM. Poszczególne wyjścia są załączane/wyłączane w wybranych odstępach czasu, od 2...120 ms. Przykładowe sekwencje załączania/wyłączania pokazano na rysunku 14.
Analog Devices
Firma Analog Devices wytwarza dwa rodzaje układów sekwencjonujących zasilanie - analogowe (tabela 4) oraz cyfrowe (tabela 5). Jak wskazuje sama nazwa, różnią się one zasadą działania. Do budowy pierwszych wykorzystano komparatory i timery, natomiast w drugich przetworniki analogowo-cyfrowe oraz cyfrowe bloki funkcjonalne. Przyjrzyjmy się przykładowym reprezentantom z obu rodzin.
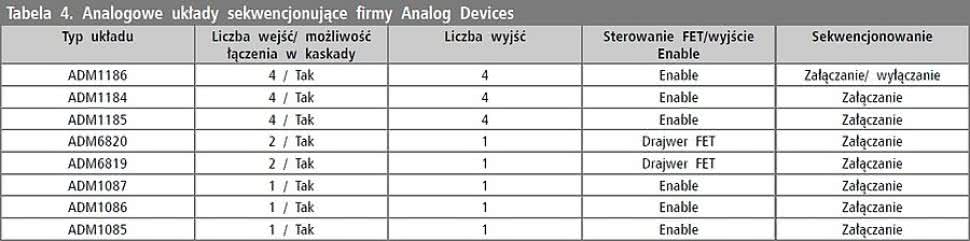
Tabela 4. Analogowe układy sekwencjonujące firmy Analog Devices |
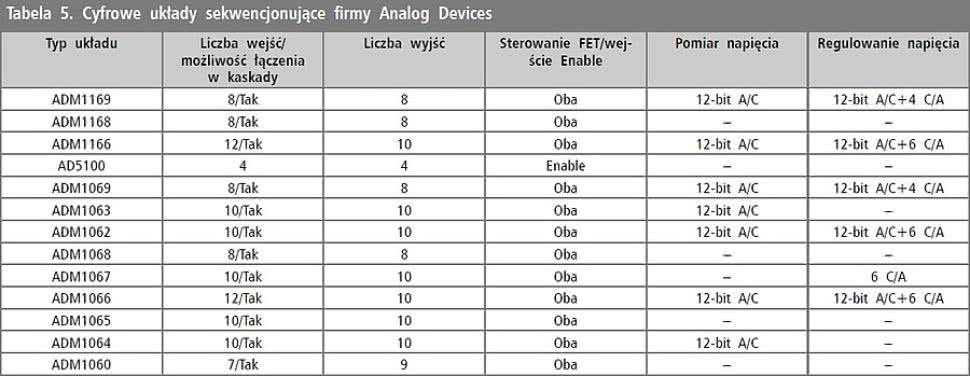
Tabela 5. Cyfrowe układy sekwencjonujące firmy Analog Devices |
Pokazany na rysunku 15 układ ADM1186 jest 4-kanałowym układem monitorującym oraz ustalającym sekwencje załączania i wyłączania napięć zasilających. Układ jest zasilany napięciem 2,7...5,5 V doprowadzonym do nóżki VCC.
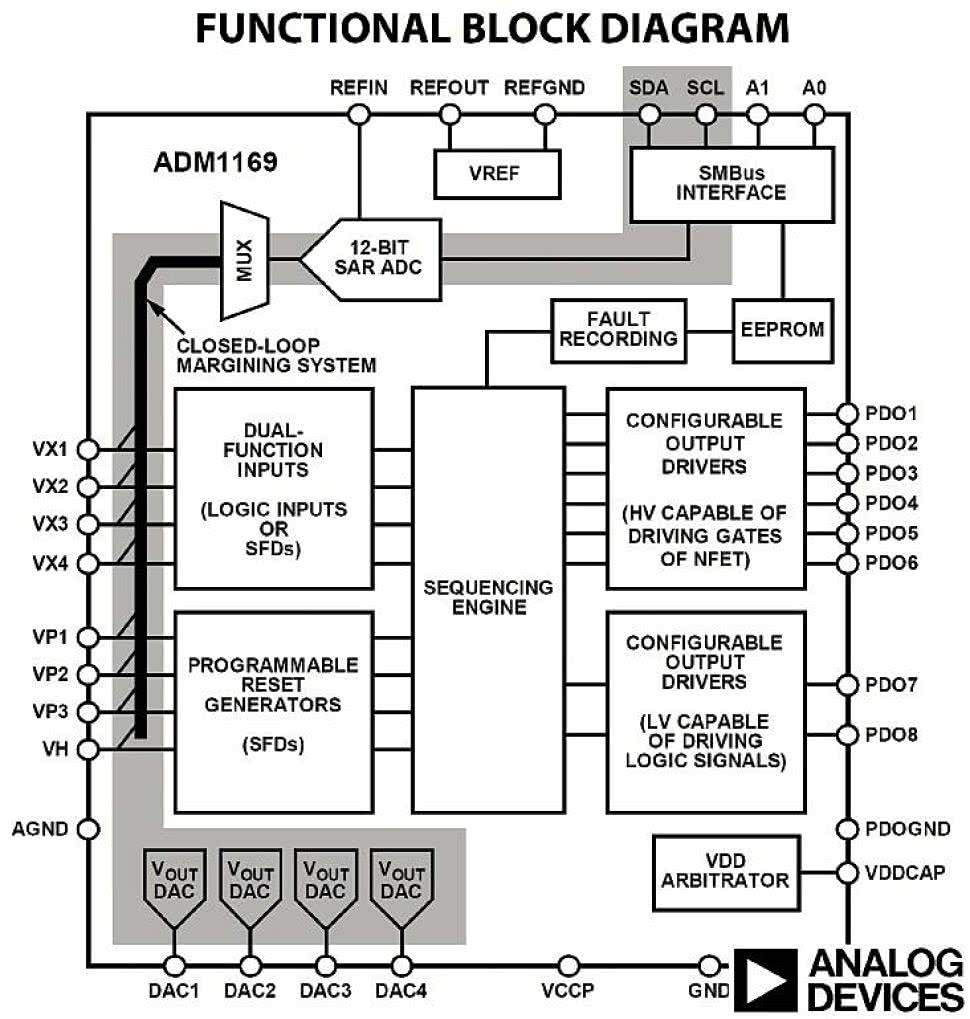
Rysunek 16. Schemat blokowy cyfrowego układu sekwencjonującego ADM1169
Napięcie doprowadzone do wejść VIN1...VIN4 jest monitorowane przez cztery precyzyjne komparatory. Do ich wejść referencyjnych jest doprowadzone wspólne napięcie odniesienia o wartości 0,6 V o dokładności w najgorszym wypadku 0,8%. Dzielniki rezystorowe na zewnątrz układu ustalają wartość napięcia zadziałania dla monitorowanych szyn zasilających. Układ ma cztery wyjścia typu otwarty dren, OUT1...OUT4.
Są one używane do załączania stabilizatorów napięcia. W wielu aplikacjach przyda się też wyjście PWRGD sygnalizujące, że wszystkie napięcia monitorowane (wejściowe) mają wartości powyżej ustalonych progów załączenia. Wbudowana maszyna stanów, zależnie od poziomu na wejściu UP/DOWN, umożliwia załączenie uruchomienie sekwencji załączającej lub wyłączającej. W stanie WAIT START narastające zbocze sygnału na wejściu UP/DOWN wyzwala sekwencję załączającą. W stanie POWER-UP DONE opadające zbocze sygnału na wejściu UP/DOWN wyzwala sekwencję wyłączającą.

Rysunek 17.
Przedstawicielem rodziny cyfrowych układów sekwencjonujących jest ADM1169. Jego schemat blokowy pokazano na rysunku 16. Ten 8-wejściowy układ umożliwia budowanie konfigurowalnych, wielokanałowych obwodów sekwencjonowania zasilania i dodatkowo zawiera 12-bitowy przetwornik A/C i 8-kanałowy przetwornik C/A. Mogą one być używane do wykonania pętli sprzężenia zwrotnego umożliwiającego regulowanie napięcia poprzez zmianę parametrów pętli lub napięcia referencyjnego dostarczanego przez przetwornik C/A.
Cele te mogą być osiągnięte przy minimalnej liczbie komponentów zewnętrznych i dzięki temu tej pętli można na przykład używać podczas testowania wyrobów opuszczających taśmę produkcyjną (np. do sprawdzenia funkcjonowania płytki przy napięciu zasilającym obniżonym o 5%) lub mogą być używane dynamicznie do dokładnej kontroli napięcia wyjściowego konwertera DC/DC.
Co ważne, bez względu na rodzaj, układ sekwencjonujące firmy Analog Devices mogą być łączone w celu zwiększenia liczby monitorowanych napięć.
Podsumowanie
Dobierając układ sekwencjonujący zasilanie do własnej aplikacji trzeba uważnie przestudiować dane katalogowe zasilanego układu, aby zorientować się, jaki rodzaj sekwencji zasilającej jest wymagany i ile napięć zasilających będzie załączane. Następnie, mając tę wiedzę, można wybrać jedno z licznych rozwiązań dostępnych w ofertach wielu producentów. Ten artykuł może wskazać kierunki poszukiwań, ale na pewno, ze względu na swoją ograniczoną objętość i jedynie poglądowy charakter, nie odpowie na wszystkie pytania. Na pewno pomoże jednak wybrać właściwe kierunki poszukiwań.
Jacek Bogusz, EP
Bibliografia:
http://goo.gl/6gPJGo
http://goo.gl/wgOMhv
http://goo.gl/2cFLnb
http://goo.gl/U1l6Mt
http://goo.gl/hU5pYQ
http://goo.gl/vTJhdr